086 2
86 Modelowanie dvnamiki obiektów sterowania
86 Modelowanie dvnamiki obiektów sterowania
(9.64)
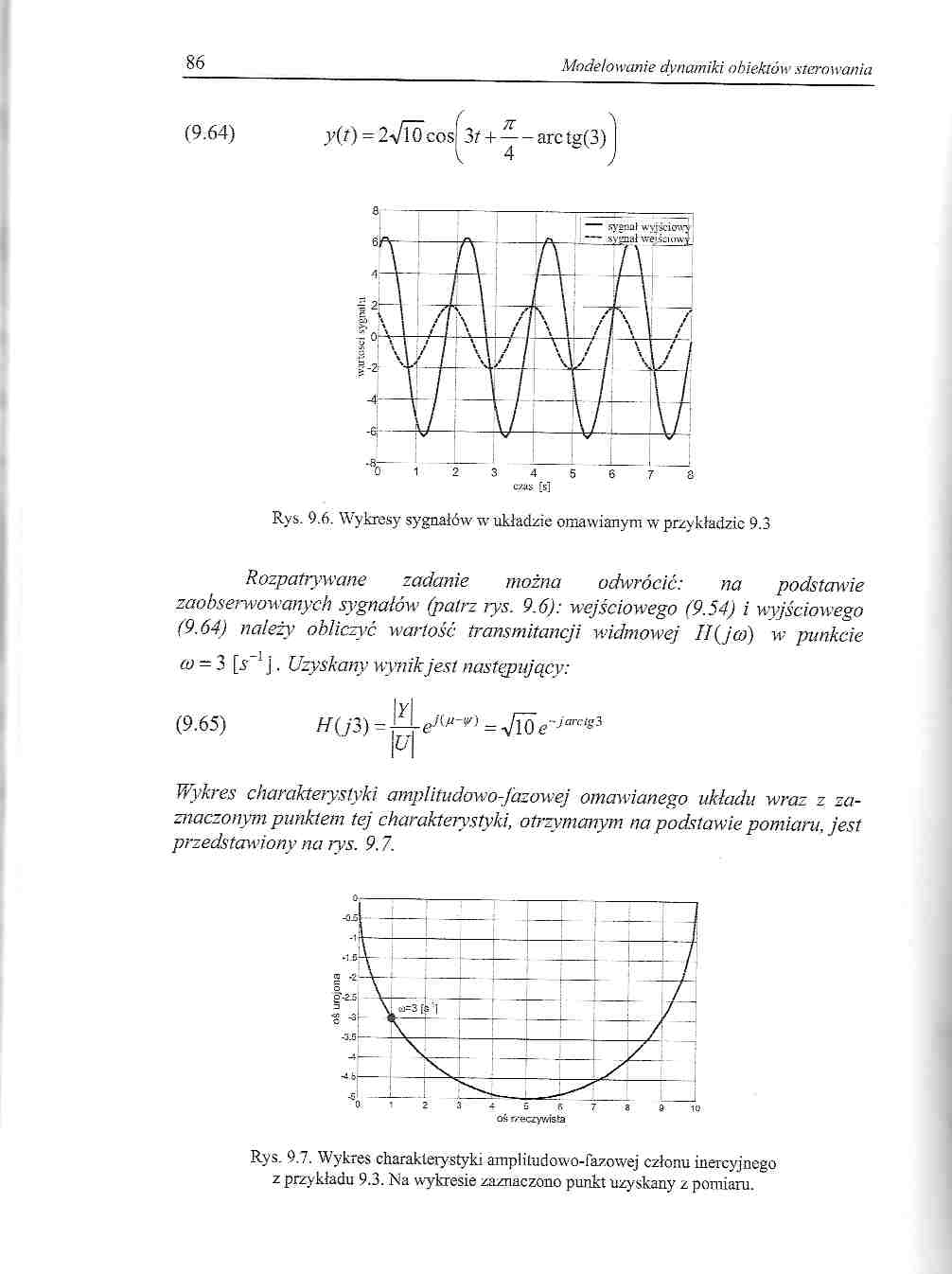
y(t) = 2-s/To cos^ 3/ + ^-- arc tg(3)
Rys. 9.6. Wykresy sygnałów w układzie omawianym w przykładzie 9.3
Rozpatrywane zadanie woźna odwrócić: na podstawie
zaobserwowanych sygnałów (patrz rys. 9.6): wejściowego (9.54) i wyjściowego
(9.64) należy> obliczyć wartość tramsmitancji widmowej II(ja) w punkcie
(0-2 O-1 j. Uzyskany wynikjest następujący:
(9.65) H(J3) - = Me~jarc,si
Wykres charakterystyki amplitudowo-fazowej omawianego układu wraz z zaznaczonym punktem tej charakterystyki, otrzymanym na podstawie pomiaru, jest przedstawiony na rys. 9.7.

Rys. 9.7. Wykres charakterystyki ampliludowo-fazowej członu inercyjnego z przykładu 9.3. Na wykresie zaznaczono punkt uzyskany z pomiaru.
Wyszukiwarka
Podobne podstrony:
image 086 86 Szyki antenowe liniowe i planarne Z (5.36) obliczamy kierunkowość szyku o zadanej szero
086(1) 2 86 86 Tablica 39 (cd.) Nadlew okrągły ścięty NL ś DxH Nadlew okrągły kulisty NLK. i OxH Nad
086 2 86 86 Rys. 1.5.9.26. Tolerowane wymiary otoczek dla: a) wału z naciętym zębnikiem, b) zębnika,
086 3 86 86 (woriant 1) (wariant P) 90 -Ć Lp . ,. -r [ (wariant 3) Rys. 1.5.9.26.
CB i rad 086 86 V. PARAMETRY UŻYTKOWE NADAJNIKÓW Dla właściwego (tzn. maksymalnego) wykorzystania m
086 2 86 Formacje Diagram 6.3 Luki cenowe, FCOJ, marzec 1992. Diagramy 6A-6.6 ukazują kilka przykład
048 2 48 Modelowanie dvnamiki obiektów sterowania Zagadnienie powyższe przyjmuje też formą zagadnien
084 2 84 Modelowanie dvnamiki obiektów sterowania 2) amplitudy zespolone sygnału wejściowego i sygna
040 3 40 Modelowanie dynamiki obiektów sterowania t (5.7) y{1) - F(u)(l) =
042 4 42 Modelowanie dynamiki obiektów sterowania 42 Modelowanie dynamiki obiektów sterowania (6.2)
44 Modelowanie dynamiki obiektów sterowania Otrzymamy: X (6.12) y(t )=
050 4 50 Modelowanie dynamiki obiektów sterowania Przyjmiemy, że znana jest wartość początkowa x(V0)
054 2 54 Modelowanie dynamiki obiektów sterowania (7.18) x(/ + rWv,W)x(o) Podobnie
056 3 56 Modelowanie dynamiki obiektów sterowania równania (7.29) x(f)= Ax(/) opis
058 3 58 Modelowanie dynamiki obiektów sterowania Łatwo spostrzec, że pierwszy składnik stanowi skła
060 5 60 Modelowanie dynamiki obiektów sterowania Zjawiły się słowa, języki. prawa, nauki i sztuki p
062 4 62 Modelowanie dynamiki obiektów sterowania Tabl. 8.2 Przykłady transformat Laplace’a
więcej podobnych podstron