062 4
62 Modelowanie dynamiki obiektów sterowania
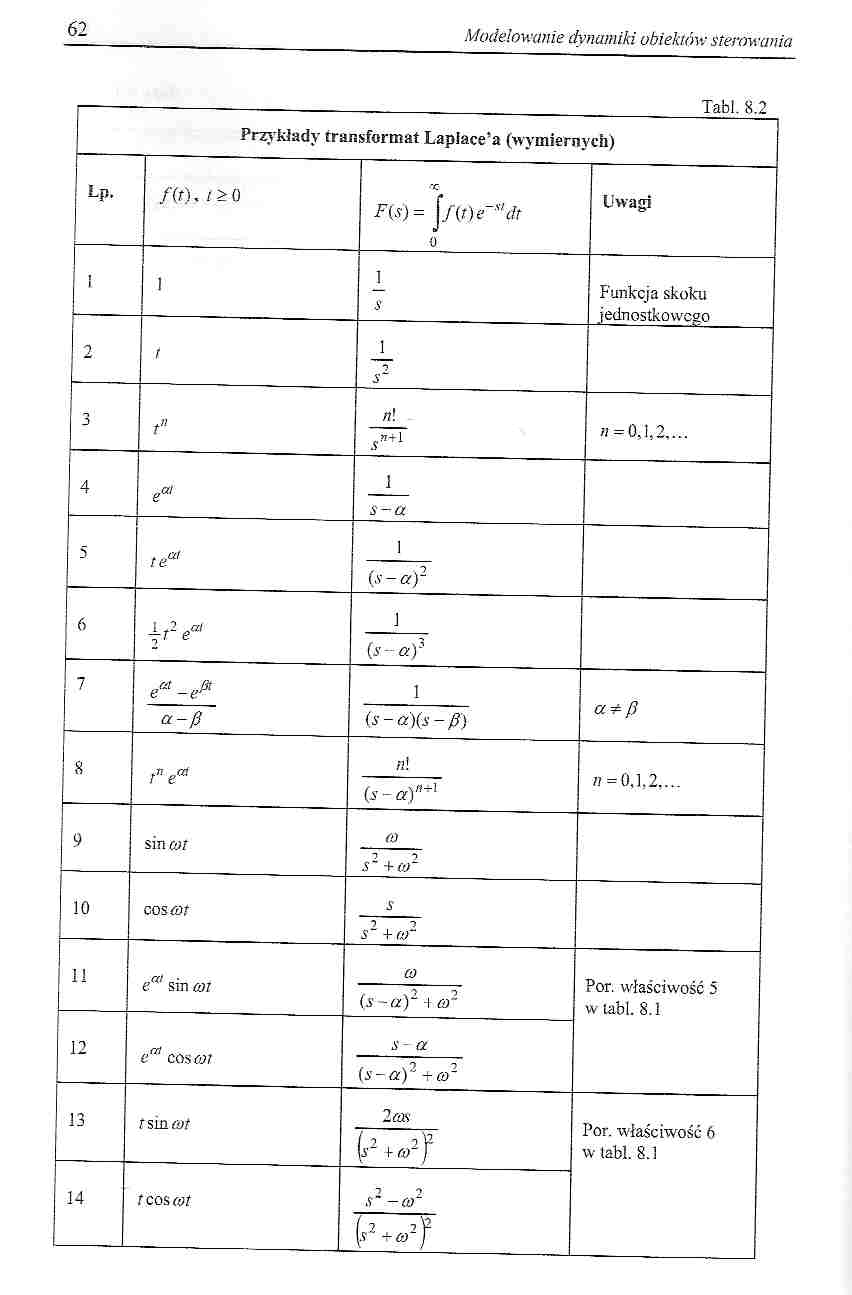
Tabl. 8.2
|
Przykłady transformat Laplace’a (wymiernych) | |||
|
Lp. |
/(?)./> 0 |
oc -FXs) = J/(t)e_'v£/r 0 |
Uwagi |
|
1 |
1 |
1 S |
Funkcja skoku jednostkowego |
|
2 |
1 |
1 5“ | |
|
3 |
t" |
n\ i”+1 |
» = 0,1,2,... |
|
4 |
eal |
1 ó'-££ | |
|
tea' |
1 | ||
|
(s-«)2 | |||
|
6 |
1 | ||
|
±r |
0-&Y | ||
|
7 |
e* -e<* |
i |
a^P |
|
a-p |
(s-a)(s-P) | ||
|
8 |
tnea |
n! |
n =0,1,2.... |
|
9 |
sin tai |
(0 | |
|
-} ■> S~ +(0~ | |||
|
10 |
COS <0? |
s | |
|
■) -J 5“ + «r | |||
|
11 |
e"' sin |
fi? |
Por. właściwość 5 w tabl. 8.1 |
|
(i -«)“ + £9“ | |||
|
12 |
A' - fi: | ||
|
e cos cot |
»2 2 (s-fir) +fi) | ||
|
13 |
tsmtot |
2®v |
Por. właściwość 6 w- labl. 8.1 |
|
(r i co2 } | |||
|
14 |
i cos (ot |
-> 'i s~ -co~ | |
|
2 2^ V +6) 1 | |||
Wyszukiwarka
Podobne podstrony:
076 2 76 Modelowanie dynamiki obiektów sterowania W wyniku zastosowania przekształcenia Laplace a do
040 3 40 Modelowanie dynamiki obiektów sterowania t (5.7) y{1) - F(u)(l) =
042 4 42 Modelowanie dynamiki obiektów sterowania 42 Modelowanie dynamiki obiektów sterowania (6.2)
44 Modelowanie dynamiki obiektów sterowania Otrzymamy: X (6.12) y(t )=
050 4 50 Modelowanie dynamiki obiektów sterowania Przyjmiemy, że znana jest wartość początkowa x(V0)
054 2 54 Modelowanie dynamiki obiektów sterowania (7.18) x(/ + rWv,W)x(o) Podobnie
056 3 56 Modelowanie dynamiki obiektów sterowania równania (7.29) x(f)= Ax(/) opis
058 3 58 Modelowanie dynamiki obiektów sterowania Łatwo spostrzec, że pierwszy składnik stanowi skła
060 5 60 Modelowanie dynamiki obiektów sterowania Zjawiły się słowa, języki. prawa, nauki i sztuki p
064 4 64 Modelowanie dynamiki obiektów sterowania Wielomian występujący vr mianowniku ma trzy pierwi
068 3 68 Modelowanie dynamiki obiektów sterowania s,. s2,.... sr. przy czym krotność poszczególnych
074 3 74 Modelowanie dynamiki obiektów sterowania układu. Strumień y(t) wypływającej wody z drugiego
078 3 78 Modelowanie dynamiki obiektów sterowania W sposób analogiczny wyznaczamy transmitancję równ
S2 Modelowanie dynamiki obiektów sterowania Rozpatrywany układ nie jest układam oscylacyjnym. Po wyl
090 2 90 Modelowanie dynamiki obiektów sterowania Wynik ten można zaobserwować doświadczalnie, obser
092 2 92 Modelowanie dynamiki obiektów sterowania Ostatnia zależność dla układów przyczynowych (h(t)
98 Modelowanie dynamiki obiektów sterowania 98 Modelowanie dynamiki obiektów sterowania />0 (11.2
048 2 48 Modelowanie dvnamiki obiektów sterowania Zagadnienie powyższe przyjmuje też formą zagadnien
080 2 80 Modelowanie chnainiki obiektów sterowania (9.28) H(s) = k T2s2 + 2 ą’s +1 Układ opóźniający
więcej podobnych podstron