128 2
128 Układy regulacji automatycznej
wykorzystaniu wzmacniacza operacyjnego z odpowiednio dobraną impedancją sprzężenia zwrotnego.
Dodanie do regulatora członu całkującego ma na celu przeciwdziałanie ustalaniu się niezerowego uchybu statycznego. Sygnał sterujący u(t), generowany przez ten regulator, jest nie tylko proporcjonalny do bieżącej wartości e(t) uchybu regulacji, ale także do całki z tego uchybu:
(13.20)
Zauważmy, że sygnał sterujący (a w konsekwencji także sygnał wyjściowy układu regulacji) może się ustalić jedynie wtedy, gdy uchyb regulacji będzie zerowy. Zatem można oczekiwać, że przy stosowaniu regulatora typu PI statyczny uchyb regulacji będzie zerowy.
Oczekiwania te można potwierdzić. Dzięki dodaniu w regulatorze członu całkującego transmitancja układu otwartego ma postać:
(13.21)
Hr{ś)Hn{s) = kp±4^-H0{s) Ts
Opierając się na spostrzeżeniu, że w tym układzie występuje człon całkujący.

dzić, że układ regulacji z regulatorem typu PI będzie aslatyezny (tzn. błąd statyczny będzie równy zeru).
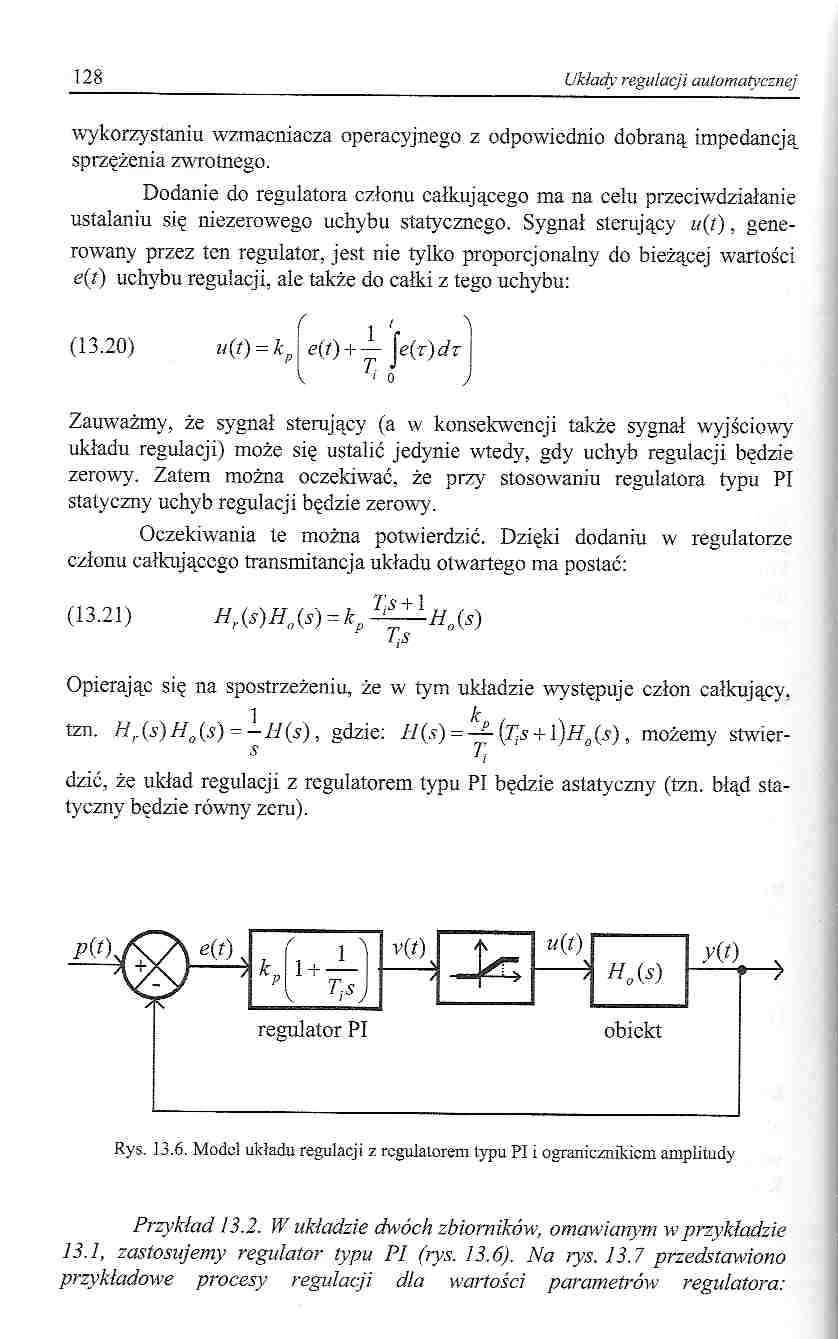
P{t)

regulator PI
obiekt
Rys. 13.6. Model układu regulacji z regulatorem lypu PI i ogranicznikiem amplitudy
Przykład 13.2. W układzie ctwóch zbiorników, omawianym w przykładzie 13.1, zastosujemy regulator typu PI (rys. 13.6). Na rys. 13.7 przedstawiono przykładowe procesy: regulacji dla wartości parametrów regulatora:
Wyszukiwarka
Podobne podstrony:
108 3 108 Układy regulacji automatycznej 108 Układy regulacji automatycznej (12.1) y?ęX,(0 = -TJ-[*,
78608 Zdjęcie053 (6) Elektrohydrauliczne układy regulacji automatycznej, zwane układami zamkniętymi,
84. Układy regulacji automatycznej. 85. Rodzaje regulatorów w układach regulacji automatycznej. 86.
CCF090613�017 Rys. 10.16B. Podstawowe układy ograniczników napięcia ze wzmacniaczami operacyjnymi: a
178 Układy regulacji automatycznej Przykład 15.7. Przeprowadzimy eksperyment Astroma i Hdggłunda dla
106 2 106 Układy’ regulacji automatyczny 1 bądź doskonały m A z zewnątrz żadnej pomocy nie szuka&nbs
110 Układy regulacji automatycznej gdzie: U - strumień wody! dopływającej do zbiornika pierwszego po
116 Układy regulacji automatycznej Na n>s. 12.7 zilustrowano zależność wzmocnienia od częstotliwo
118 Układy regulacji automatycznej Uzyskany wynik wskazuje na duże możliwości kształtowania
4.2. Układy regulacji automatycznej 4.2.1. Materiał nauczania Klasyfikacja układów regulacji Ze
Kordowicz-Sot A.: Automatyka i robotyka. Układy regulacji automatycznej. WSiP, War
150 2 150 Układy regulacji automatycznej A, > rty (a)~ i a. <7 U7 ęc forcie A2 >0. Analizow
134 2 134 Układy regulacji automatyczni. Stąd (13.44) Uzyskane wyniki obliczeń analitycznych i numer
140 3 140 Układy regulacji automatyczne a więc układ regulacji przy dowolnej dodatniej wartości kp b
146 Układy regulacji automatycznej kp > 24.4389 [m7sj obliczona odpowiedź skokowa będzie mieć
148 3 148 Układy regulacji automatycznej (14.29) M(s) = «>1 + a ^ + cĄs2 + a[s
156 2 156 Układy regulacji automatycznej symetrii wykresu względem osi rzeczywistej, a warunek (15.9
więcej podobnych podstron