150 2
150 Układy regulacji automatycznej
A, > rty (a\)~ i a\. <7 U7'ęc forcie A2 >0. Analizowany warunek jest spełniony. /es// />e(l.57,34.79).
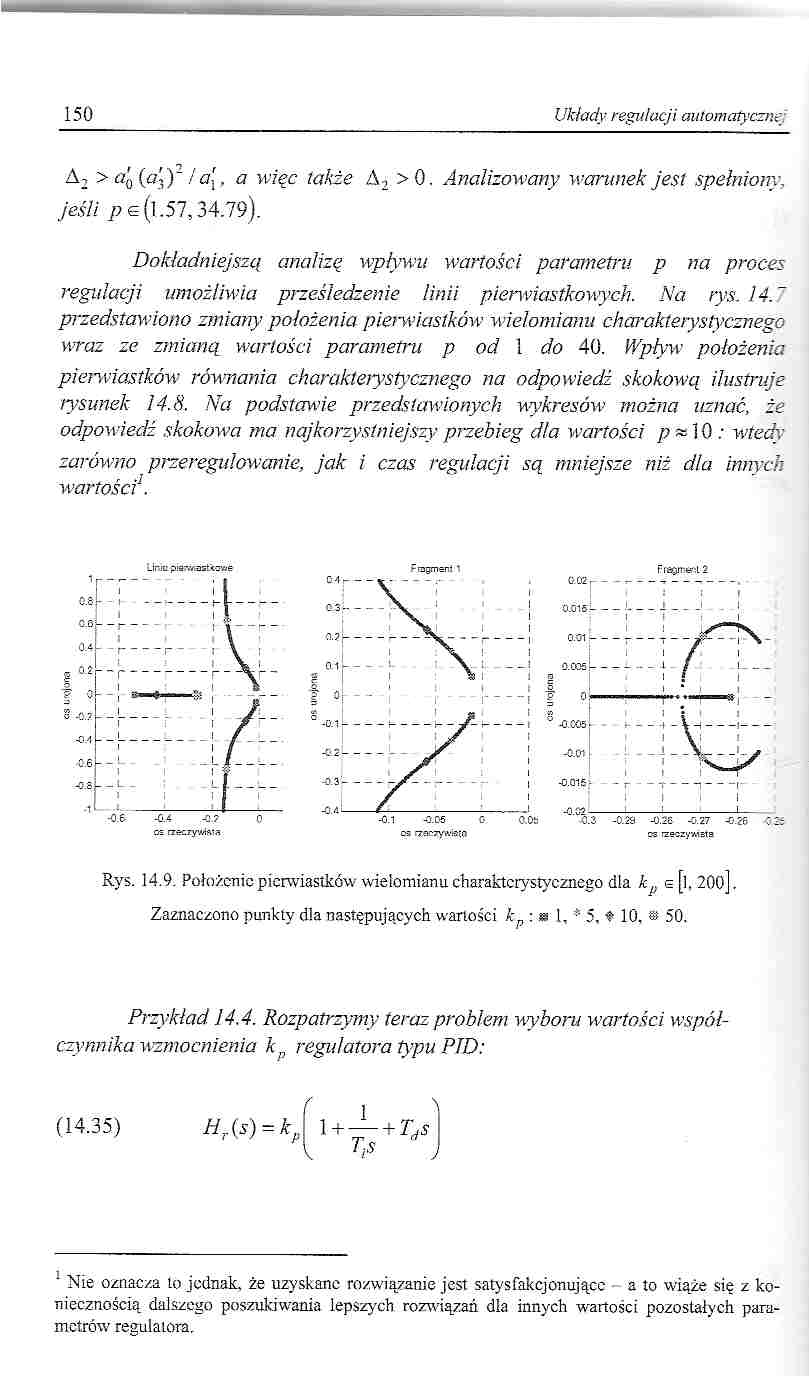
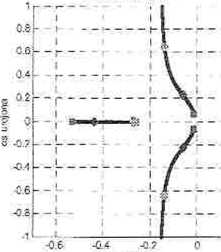
Dokładniejszą analizą wpływu wartości parametru p na proces regulacji umożliwia przesiedzenie linii pierwiastkowych. Na rys. l4.~ przedstawiono zmiany położenia pierwiastków wielomianu charakterystycznego wraz ze zmianą wartości parametni p od 1 do 40. Wpływ położenia pierwiastków równania charakterystycznego na odpowiedź skokową ilustruje rysunek 14.8. Na podstawie przedstawionych wykresów można uznać, że odpowiedź skokowa ma najkorzystniejszy przebieg dla wartości p~ 10 : wtedy zarówno przeregulowcmie, jak i czas regulacji są mniejsze niż dla innych wartości1 2 3.
Limu piararsist<-3vae
0= rr-cryy/ift-s

-0.1 -0.05 G
05 i^araysyiaw
■C.A
Fraon-fcr.l 2
O.Ots

Rys. 14.9. Położenie pierwiastków wielomianu charakterystycznego dla kp e[l. 200]. Zaznaczono punkty dla następujących wartości kp : m 1, * 5, $ 10. ® 50.
Przykład 14.4. Rozpatrzymy teraz problem wyboru wartości współczynnika wzmocnienia kp regulatora typu PJD:
(14.35)
Hr(s) = kp
\
1
TjS
"
y
Nie oznacza to jednak, że uzyskane rozwiązanie jest satysfakcjonujące a to wiąże się z ko
niecznością dalszego poszukiwania lepszych rozwiązań dla innych wartości pozostałych para
metrów7 regulatora.
Wyszukiwarka
Podobne podstrony:
108 3 108 Układy regulacji automatycznej 108 Układy regulacji automatycznej (12.1) y?ęX,(0 = -TJ-[*,
78608 Zdjęcie053 (6) Elektrohydrauliczne układy regulacji automatycznej, zwane układami zamkniętymi,
84. Układy regulacji automatycznej. 85. Rodzaje regulatorów w układach regulacji automatycznej. 86.
178 Układy regulacji automatycznej Przykład 15.7. Przeprowadzimy eksperyment Astroma i Hdggłunda dla
106 2 106 Układy’ regulacji automatyczny 1 bądź doskonały m A z zewnątrz żadnej pomocy nie szuka&nbs
110 Układy regulacji automatycznej gdzie: U - strumień wody! dopływającej do zbiornika pierwszego po
116 Układy regulacji automatycznej Na n>s. 12.7 zilustrowano zależność wzmocnienia od częstotliwo
118 Układy regulacji automatycznej Uzyskany wynik wskazuje na duże możliwości kształtowania
4.2. Układy regulacji automatycznej 4.2.1. Materiał nauczania Klasyfikacja układów regulacji Ze
Kordowicz-Sot A.: Automatyka i robotyka. Układy regulacji automatycznej. WSiP, War
128 2 128 Układy regulacji automatycznej wykorzystaniu wzmacniacza operacyjnego z odpowiednio dobran
134 2 134 Układy regulacji automatyczni. Stąd (13.44) Uzyskane wyniki obliczeń analitycznych i numer
140 3 140 Układy regulacji automatyczne a więc układ regulacji przy dowolnej dodatniej wartości kp b
146 Układy regulacji automatycznej kp > 24.4389 [m7sj obliczona odpowiedź skokowa będzie mieć
148 3 148 Układy regulacji automatycznej (14.29) M(s) = «>1 + a ^ + cĄs2 + a[s
156 2 156 Układy regulacji automatycznej symetrii wykresu względem osi rzeczywistej, a warunek (15.9
162 Układy regulacji automatycznej (15.25) HUcoa)~l (15.26) arg
więcej podobnych podstron