140 3
140 Układy regulacji automatyczne
a więc układ regulacji przy dowolnej dodatniej wartości kp będzie stabilny Dodatkowo możemy stwierdzić', że dla kp > 1.5 [m1 2/sj odpowiedź skokowa jes:
oscylacyjna (pierwiastki są zespolone). Stała wartość części rzeczywistej pierwiastków ma odzwierciedlenie w fakcie, że czas regulacji pozostaje niezmienny. Wzrost, wraz z kp, wartości modułu części urojonej pierwiastków.
oznacza, że maleje okres oscylacji odpowiedzi skokowej.
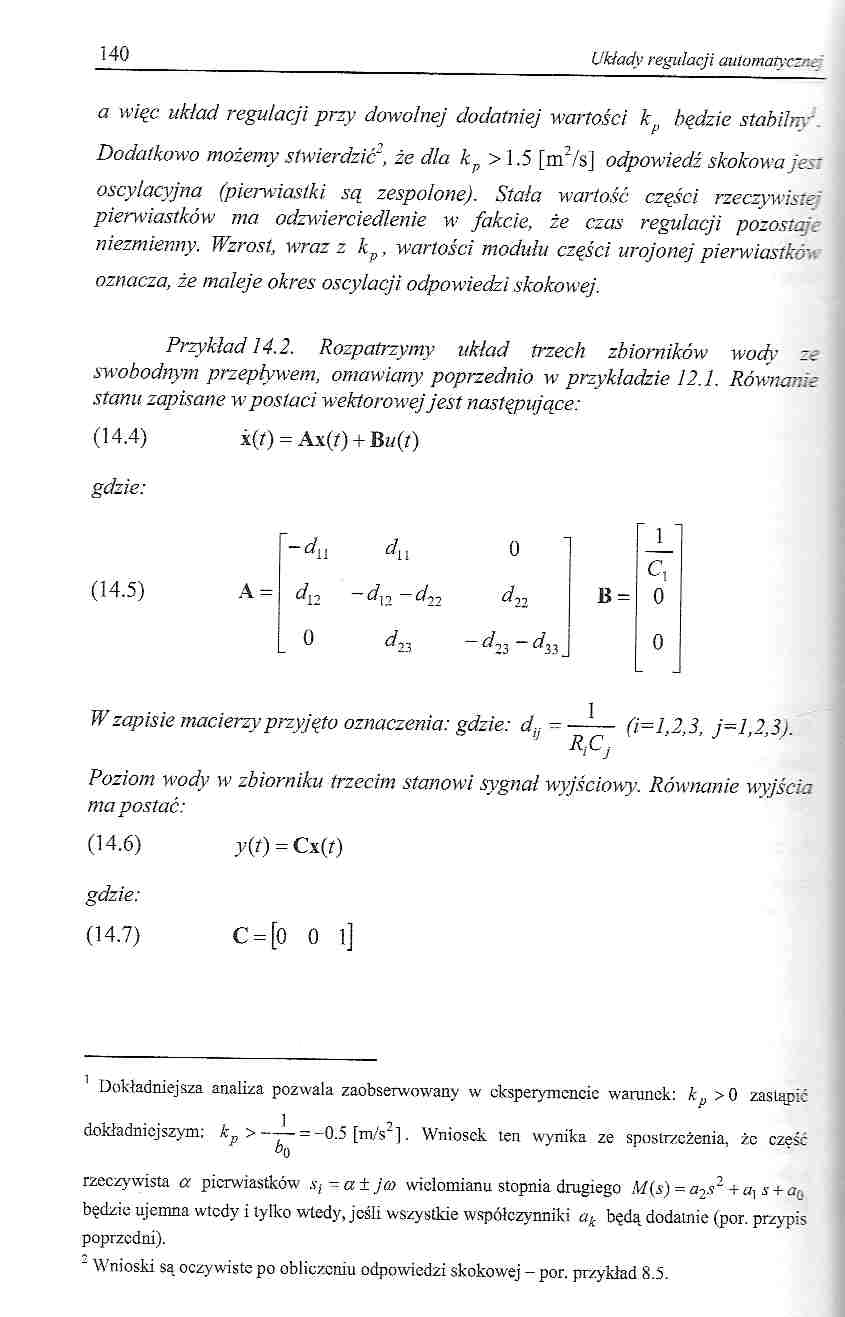
Przykład 14.2. Rozpatrzymy układ trzech zbiorników wody? z-: swobodnym przepływem, omawiany poprzednio w przykładzie 12.1. Równane stanu zapisane w postaci wektorowej jest następujące:
(14.4)
gdzie:
x(/) = Ax(f) + Bu(t)
|
“ 1 ' | ||||
|
-dn |
du |
0 | ||
|
C1 | ||||
|
&\2 |
4 1 rl l |
d 22 |
B = |
0 |
|
0 |
dn |
—d23 - di3 ^ |
0 | |
(14.5)
W zapisie macierzy przyjęto oznaczenia: gdzie: dtj -
0=1,2,3, j=1,2,3).
Poziom wody w zbiorniku trzecim stanowi sygnał wyjściowy. Równanie wyjścia ma postać:
(14.6) y{t) = Cx{t) gdzie:
(14.7) C = [0 0 l]
Dokładniejsza analiza pozwala zaobserwowany w eksperymencie warunek: ku>0 zastąpić
dokładniejszym; k„>—— = -0.5 [m/s“ ]. Wniosek len wynika ze spostrzeżenia, żc cześć b0
rzeczywista a pierwiastków .v( — a±ja> wielomianu stopnia drugiego M(s) = a2s2 + ią s + a^ będzie ujemna wtedy i tylko wtedy, jeśli wszystkie współczynniki a^ będą dodatnie (por. przypis poprzedni).
" Wnioski są oczywiste po obliczeniu odpowiedzi skokowej - por. przykład 8.5.
Wyszukiwarka
Podobne podstrony:
194 2 194 Układy regulacji automatycznej Zaproponowany przez Smitha układ najczęściej jest nazywany
108 3 108 Układy regulacji automatycznej 108 Układy regulacji automatycznej (12.1) y?ęX,(0 = -TJ-[*,
Podział ze względu na zadania układu układy stabilizacji automatycznej (regulacja stałowartościowa)
78608 Zdjęcie053 (6) Elektrohydrauliczne układy regulacji automatycznej, zwane układami zamkniętymi,
84. Układy regulacji automatycznej. 85. Rodzaje regulatorów w układach regulacji automatycznej. 86.
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
178 Układy regulacji automatycznej Przykład 15.7. Przeprowadzimy eksperyment Astroma i Hdggłunda dla
106 2 106 Układy’ regulacji automatyczny 1 bądź doskonały m A z zewnątrz żadnej pomocy nie szuka&nbs
110 Układy regulacji automatycznej gdzie: U - strumień wody! dopływającej do zbiornika pierwszego po
116 Układy regulacji automatycznej Na n>s. 12.7 zilustrowano zależność wzmocnienia od częstotliwo
118 Układy regulacji automatycznej Uzyskany wynik wskazuje na duże możliwości kształtowania
4.2. Układy regulacji automatycznej 4.2.1. Materiał nauczania Klasyfikacja układów regulacji Ze
Rys. 6. Wybrane układy sterowania i automatycznej regulacji przemysłowego silnika gazowego napędzają
Kordowicz-Sot A.: Automatyka i robotyka. Układy regulacji automatycznej. WSiP, War
więcej podobnych podstron