instalacje126
4. TEORIA SILNIKA SKOKOWEGO 134
cego, Obwód ten przetwarza impulsy o opóźnionym dzięki sygnałowi komparatora czasie trwania, doprowadzone do silnika. Kiedy silnik zwalnia, komparator dostarcza większe napięcie do układu opóźniającego, powodując mniejszą zwłokę. To powoduje kompensujące przyspieszenie. Podobnie, kiedy silnik przyspiesza, komparator wydłuża zwłokę, powodując opóźnienie.
Innym sposobem zwalczania rezonansu średniej częstotliwości — — nawet bardziej skutecznym niż poprzedni — jest praca miniskokowa. Praca miniskokowa, opisana w rozdziale trzecim, polega na podziale skoku bazowego na dużą liczbę mniejszych skoków, zwanych miniskokami. Uproszczony układ do zwalczania rezonansu średniej częstotliwości z zastosowaniem sterowania miniskokowego przedstawiono na rys. 4.25.
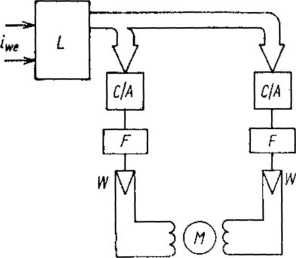
Rys. 4.25. Uproszczony schemat układu do zwalczania rezonansu silnika skokowego przez sterowanie miniskokowę
L — licznik; Cl A — przekształtniki nieliniowe; F — filtr; W — wzmacniacze
Ponieważ każdy miniskok jest znacznie mniejszy od skoku bazowego, więc odpowiedź silnika na pojedynczy miniskok ma wytłumione oscylacje. Przy prędkościach odpowiadających konwencjonalnemu rezonansowi średniej częstotliwości, oscylacje w związku z odpowiedzią na sumę miniskoków stają się równe zeru. Ponadto, praca miniskokowa odbywa się z dużą częstotliwością, ponieważ trzeba dużo miniskoków do uzyskania ruchu obrotowego wału z prędkością odpowiadającą pracy pełlioskokowej. Ta duża częstotliwość zwykle przekracza częstotliwość rezonansową silnika.
Silnik skokowy zachowuje się jak filtr dolnoprzepustowy prędkości skokowej, powodując uzyskanie bardziej gładkiego przebiegu krzywej prędkości wału aniżeli przy pracy pełnoskokowej. Ilustrację powyższego
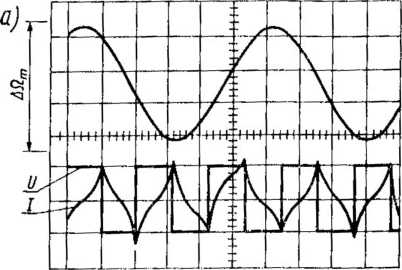
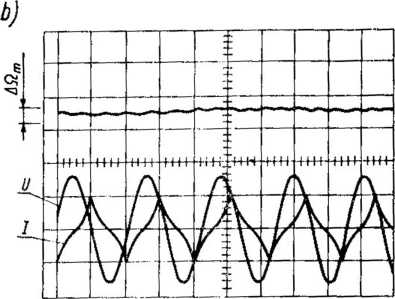
Rys. 4.26. Przebiegi w przypadku rezonansu średniej częstotliwości przy pracy peł-noskokowej (a) i miniskokowej (b) silnika skokowego (wg [85])
AI2,,, — zmienność prędkości wału (200 skoków/s/działkę); U — napięcie wyjściowe wzmacniacza; I — prąd silnika
stanowi rys. 4.26, na którym pokazano dla 923 skoków bazowych/s przebiegi zmienności prędkości A Qm walu, napięcia wejściowego U wzmacniacza oraz prądu I silnika przy rezonansie średniej częstotliwości, w przypadku pracy pelnoskokowej (a) i pracy miniskokowej (b). Podatność sterowania miniskokowcgo do ograniczania rezonansu wiąże się częściowo z kształtem krzywych sterowania silnika pochodzących ze wzmacniacza. W porównaniu z konwencjonalnymi, prostokątnymi sygnałami napięcia (rys. 4.26a) właściwymi dla pracy pelnoskokowej, przy sterowaniu miniskokowym występują sinusoidalne przebiegi napięcia (rys. 4.26b), zapewniając mniejszą zmienność prędkości.
Wyszukiwarka
Podobne podstrony:
45996 instalacje114 4. TEORIA SILNIKÓW SKOKOWYCH 110 Ten wzór został uzyskany teoretycznie przy impe
14130 instalacje113 4. TEORIA SILNIKÓW SKOKOWYCH 108 pokazanego na rys. 4.7, na którym dla uproszcze
instalacje105 4. Teoria silnika skokowego4.1. Stany pracy silnika skokowego Istotne znaczenie mają n
instalacje106 4. TEORIA SILNIKÓW SKOKOWYCH 94 Graniczna częstotliwość stanu quasistatycznego jest og
instalacje116 4. TEORIA SILNIKA SKOKOWEGO 114 gdzie (4.55) Podstawiając
instalacje120 4. TEORIA SILNIKA SKOKOWEGO 122 Równania napięć na uzwojeniach stojana u - Rh -
instalacje112 4. TEORIA SILNIKÓW SKOKOWYCH 106 Równanie (4.27) może być uproszczone przez podstawien
instalacje121 4. TEORIA SILNIKA SKOKOWEGO 124 4. TEORIA SILNIKA SKOKOWEGO 124 (4.78) Równania napięć
instalacje122 4. TEORIA SILNIKA SKOKOWEGO 126 W celu uzyskania najkorzystniejszego tłumienia musi by
instalacje125 4, TEORIA SILNIKA SKOKOWEGO 132 wirnika silnika skokowego w chwili, kiedy nastąpi równ
74324 instalacje107 4. TEORIA SILNIKÓW SKOKOWYCH 96 kreskowany pomiędzy krzywymi A i B nazywa się ob
60370 instalacje117 4. TEORIA SILNIKA SKOKOWEGO 116 gdzie moment odniesienia (4.59) Krzywe przedstaw
więcej podobnych podstron