Mechanika@0
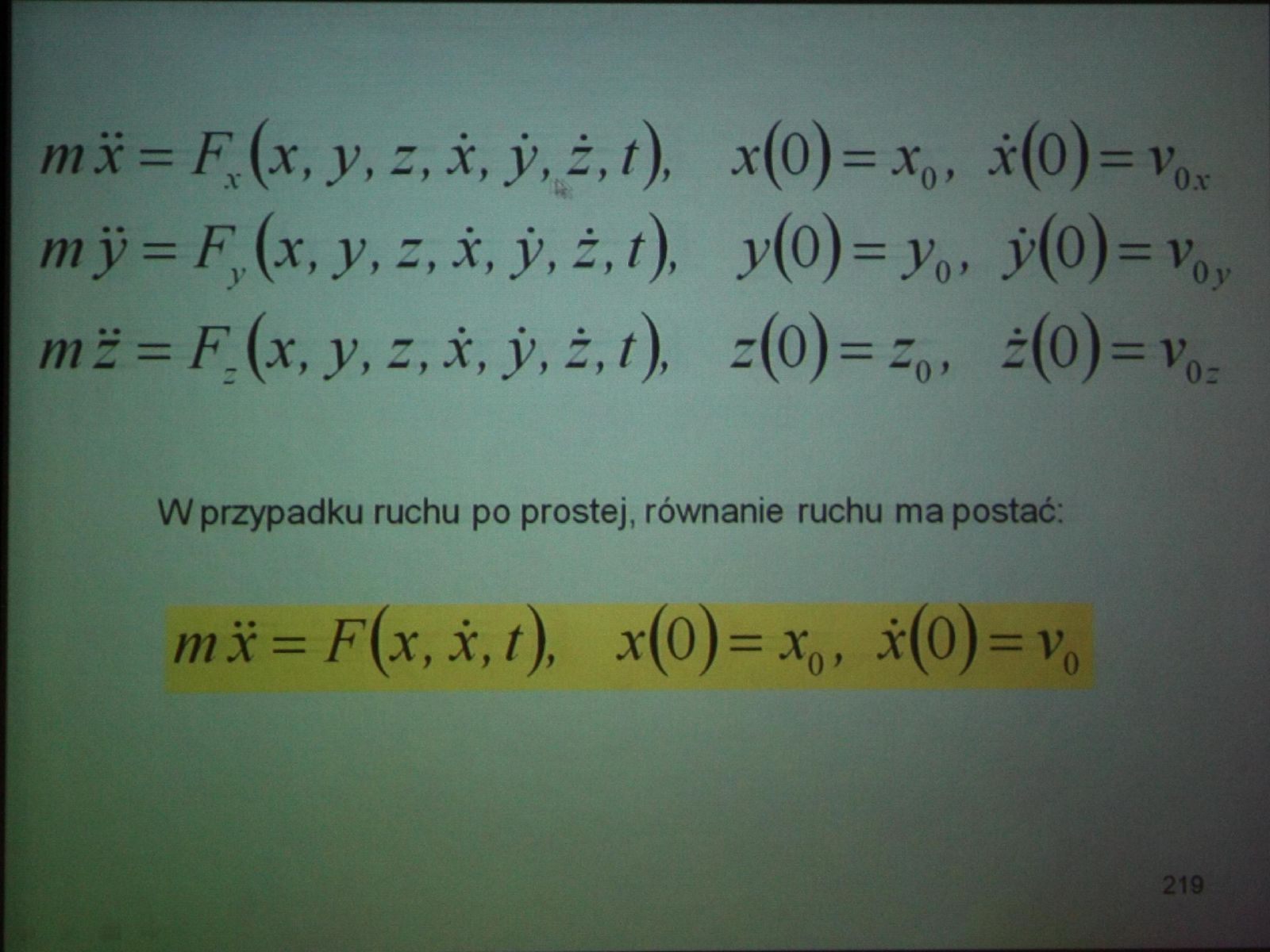
mx = Fx(x, y, z, x, y,.ż, ł), x(0)=x0, x(0) my = Fy{x,y, z,x,y,ż,t), y(0) = y,t, j(o) mź = F_(x, y, z, x, y, ż, i), z(0) = z0, ż(0)[
W przypadku ruchu po prostej, równanie ruchu ma postać:
mx = F(x,x,t), *(0)=*0, x(0) = v0
Wyszukiwarka
Podobne podstrony:
oznaczenie współrzędnych stanowiska GPS Lp = 4: mXs:=mx =0.01 4 niy s := My^ = 0.01 mz.s := mzĄ ~ 0.
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
IMGP3591 poka*gof*°«°W‘AAUU HU Fy=FAADD-Fx-Fz Ostatecznie Fy= 115,5 — 69,81 - 28,9 = 16,79m2 F‘ =
wyznaczenie wykresu momentu gnącego W przekroju a- a składowe momentu gnącego wynoszą: My= 4PL Mz= 6
Px = (F:t ~Fnr) mx (8.2)P, = (F*-FJ-m, P!=(F„-F,lr)-mz gdzie: Fnr - siła ciężkości mas
fx= [Ax]p-[Ax]; fy= [Ay]p-[Ay],; fi. = y[fJ+W 13.Obliczenie odchyłki liniowej
mechanika�6 t(,V) mx +b)C + tact e ^ 4 q łujłj f^^ecLe ••
Matematyka 2 83 382 V. Elefmut) rachunku prawlopwtohten. wu 00 (7.10) fx(x)= Jf(x,y)dy, -T T fy(y)=
mechanika141 (1) => mx a - P mi
26. Dynamiczne równania ruchy punktu materiabrego Dynamiczne tównania mchy w postaci wektorowej Fx =
Dynamiczne równania mchy punktu materialnego. Dynamiczne równania mchy w postaci wektorowej Fx =m xt
img046�01 41 ław-ki, sza-fy, kif-try i skrzy-nie są sprzę-ta-mi; w nie-dzie-le i świę-ta cho-dzi-my
img129 (12) 129 jryzównanie P=2yrostów polega, jak w oiągu zamieniętym, na rozdzieleniu odchyłek fy
skanuj0110 (27) 200 B. Cieślar Naprężenia normalne: °(x,y) = _ Mx-y My -x« Jy Po podstawieniach mamy
skanuj0114 (23) 208 B. Cieślar Rys. 5.6.1 <*=-45° Rys. 5.6.2M=75V2kNm Z równań (1) i (2) obliczam
więcej podobnych podstron