1tom053

3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108
mx = I.Flx; my = XFiy; mż = ZFiz (3.48)
gdzie: a = (x; j>;z); Fi = (F ix; F ■; F i:).
Natomiast w układzie współrzędnych Mtnb (rys. 3.37)
d2s
dr:
= 2fir;
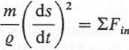
(3.49)
gdzie: F, = (Fit; Fin;0); ZFib = 0;s — współrzędna łukowa; q — promień krzywizny toru punktu M.
Pierwsze zadanie dynamiki. Dana jest masa m punktu materialnego oraz równania jego ruchu: x =/,(t), y =/2(t), z = /3(t) w stałym układzie współrzędnych Oxyz. Znaleźć siłę F działającą na ten punkt.
Rozwiązanie. Uwzględniając równania (3.48) siła
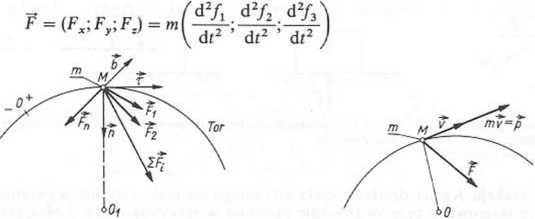
Rys. 3.37. Ruch punktu materialnego pod działaniem Rys. 3.38. Pęd punktu materialnego (ilustracja) sił w naturalnym (ruchomym) układzie M
(3.50)
Drugie zadanie dynamiki. Dana jest masa m punktu, siły działające na ten punkt {FŁ,...,/•'„} oraz warunki początkowe (x(0);y(0);z(0)) = (x0;y0;z0)
(x(0);y(0);ż(0)) = (x0;y0;ż„)
gdzie: x, y, z — współrzędne punktu materialnego w Oxyz Fj = (Fix'>Fj,',Fjz) (j=
Rozwiązanie. Uwzględniając równania (3.48) otrzymuje się tzw. problem początkowy
x = - ZFix; y = — ZFf,; ż = — ZFix m m m
^(0) = x0; y(0) = y0; z(0) = z0
J6(0) = x0; y(0) = y0; ż(0) = ż0
W ogólnym przypadku Fj = ęj(x;y; z; x;y;ż;t); przy pewnych założeniach o funkcjach <p; istnieje jedno rozwiązanie tego problemu początkowego, które można zapisać
(3.51)
(3.52)
* ^f\{x0,y0,z0,x0,y0,ż0,t) y=f2(x0,y0,z0,x0,y0,ż0,t)
2 =Mx0,y0,z0,x0,y0,ż0,t)
/
Pędem punktu o masie m i prędkości TT (rys. 3.38) jest nazywany iloczyn niv — p
Popędem siły F działającej na punkt materialny w przedziale czasu od t2 do t, jest nazywany wektor
'\Fdt = n (3.53)
f,
Jeżeli F = const, to 77 = F(t2 — z,).
Zasada pędu i popędu: Przyrost pędu punktu w czasie jest równy popędowi siły w tym czasie, a zatem
P(f2)-P(ł i) = n (3.54)
Wniosek: jeżeli /7 = 0, to p = const.
Moment pędu (kręt)jest to iloczyn wektorowy wektora położenia OM punktu M i pędu p (rys. 3.38), a więc
k0 = OM x p = OM x(mb) (3.55)
Twierdzenie o zmianie krętu: Pochodna krętu względem czasu jest równa momentowi siły

lub
(3.56)
(Mx; My; Mz)
dk* d ky dk2 \
d£ ’ d£ ’ dt J
przy czym kręt i moment siły są obliczone względem tego samego punktu. Wniosek: Jeżeli M0 = Ó", to k0 = const; jeżeli np.: Mx = 0, to kx = const.
3.4.3. Zasada równoważności energii kinetycznej i pracy, zasada zachowania energii
Jeżeli każdemu punktowi zbioru Q przyporządkuje się siłę, to oznacza, że w Q jest określone pole sił.
y77///^/>/77//7//7///77/ĄV////
Rys. 3.39. Praca stałej siły na prostoliniowym przemieszczeniu (ilustracja)
Pracą stałej siły F przyłożonej do punktu materialnego na prostoliniowym przesunięciu AB (rys. 3.39) jest nazywany iloczyn skalamy
W=P-AŚ=F-AB cosa ae<0,tt> (3.57)
Praca po krzywej k (rys. 3.40) zanurzonej w polu sił F = (P,Q,R) wyraża się za pomocą całki krzywoliniowej
Wi = jF-ds = SPdx+Qdy+Rdz, (F = F(x,y,z)) (3.58)
k k
Pole sił jest polem potencjalnym, jeżeli praca po dowolnej krzywej zamkniętej jest równa zeru.
Praca sił pola ziemskiego F=(0;0;—mg) od punktu A(x1;yl;zi) do punktu na rys. 3.41 wynosi fV= mg(z2 — z1).
Wyszukiwarka
Podobne podstrony:
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
1tom059 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 120 jctórej: H— funkcja Heaviside’a, tj. H
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
więcej podobnych podstron