1tom051
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104

Właściwości:
1. Torem dowolnego punktu MeQ jest okrąg leżący w płaszczyźnie prostopadłej do osi obrotu przechodzącej przez M o promieniu rM = OlM (rys. 3.26).
2. Prędkości i przyspieszenia punktów ciała (2, leżących w płaszczyźnie prostopadłej do osi obrotu, są liniowymi funkcjami odległości tych punktów od osi obrotu; oblicza się je ze wzorów (3.26...3.29).
Równanie kinematyczne
<P =f(t) (3.33)
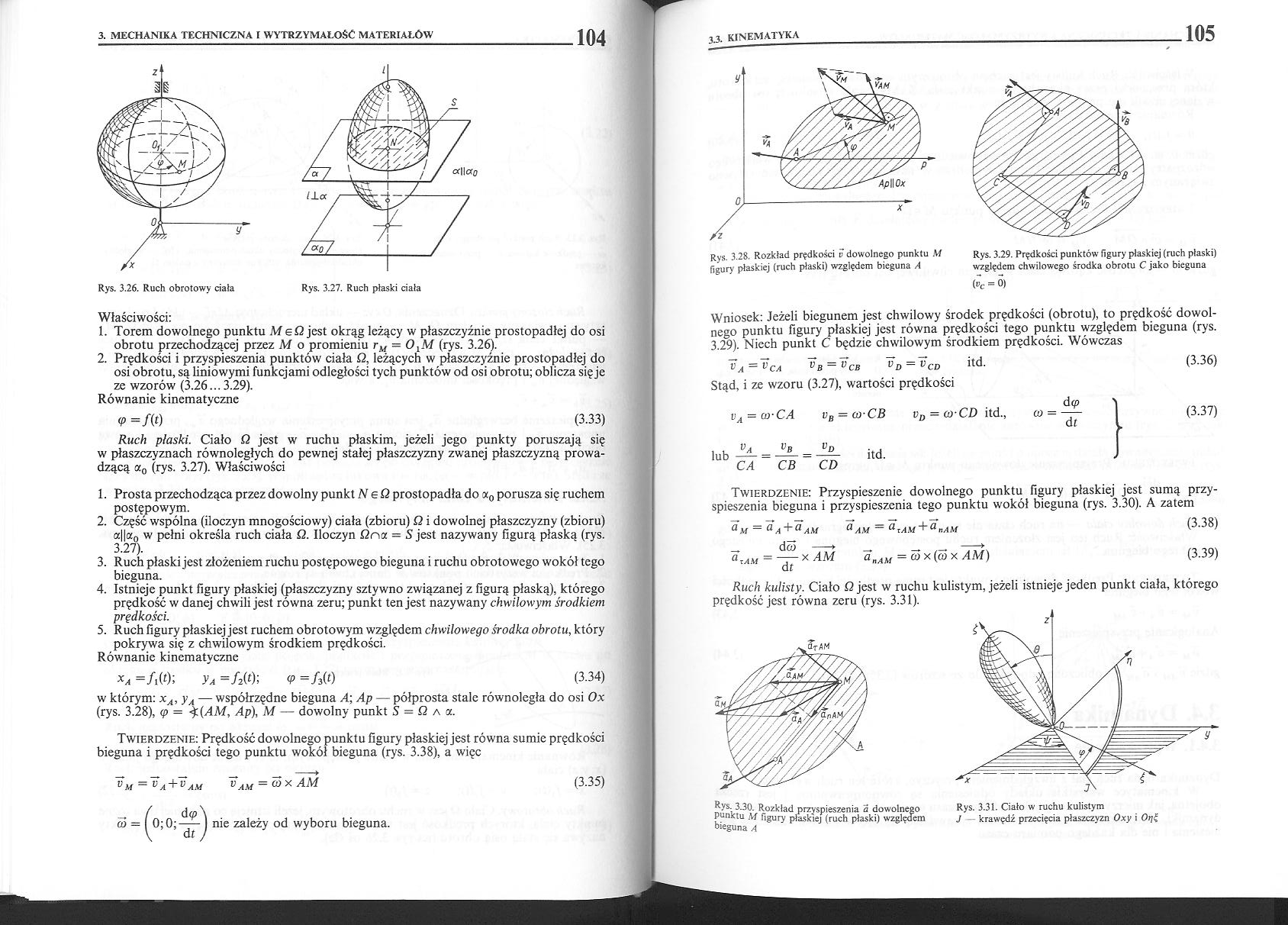
Ruch plaski. Ciało Q jest w ruchu płaskim, jeżeli jego punkty poruszają się w płaszczyznach równoległych do pewnej stałej płaszczyzny zwanej płaszczyzną prowadzącą a0 (rys. 3.27). Właściwości
1. Prosta przechodząca przez dowolny punkt N e Q prostopadła do a0 porusza się ruchem postępowym.
2. Część wspólna (iloczyn mnogościowy) ciała (zbioru) Q i dowolnej płaszczyzny (zbioru) a||a0 w pełni określa ruch ciała Q. Iloczyn Qrvx = S jest nazywany figurą płaską (rys. 3.27).
3. Ruch plaski jest złożeniem ruchu postępowego bieguna i ruchu obrotowego wokół tego bieguna.
4. Istnieje punkt figury płaskiej (płaszczyzny sztywno związanej z figurą płaską), którego prędkość w danej chwili jest równa zeru; punkt ten jest nazywany chwilowym środkiem prędkości.
5. Ruch figury płaskiej jest ruchem obrotowym względem chwilowego środka obrotu, który pokrywa się z chwilowym środkiem prędkości.
Równanie kinematyczne
=/,(t); y a =/2(t); <p =m (3.34)
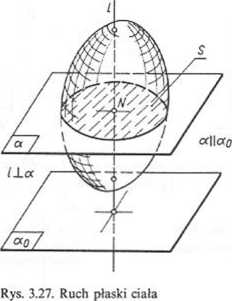
w którym: xA, yA — współrzędne bieguna A; Ap — półprosta stale równoległa do osi Ox (rys. 3.28), <p = %(AM, Ap), M — dowolny punkt S — Q a a.
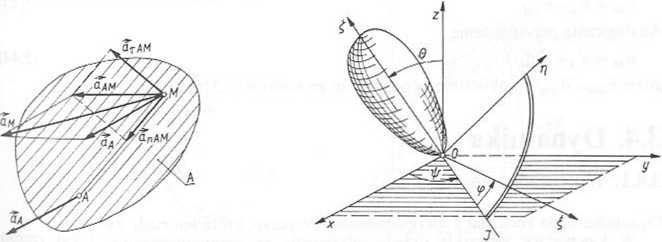
Twierdzenie: Prędkość dowolnego punktu figury płaskiej jest równa sumie prędkości bieguna i prędkości tego punktu wokół bieguna (rys. 3.38), a wiec
=~ĆA +7Am ~»am = 3x AM (3.35)
(JO —

nie zależy od wyboru bieguna.
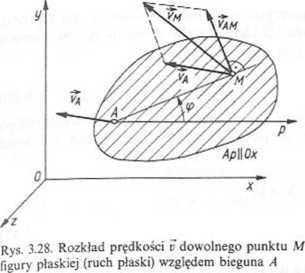
Rys. 3.29. Prędkości punktów figury płaskiej (ruch płaski) względem chwilowego środka obrotu C jako bieguna
(vc = 0)
Wniosek: Jeżeli biegunem jest chwilowy środek prędkości (obrotu), to prędkość dowol-nego punktu figury płaskiej jest równa prędkości tego punktu względem bieguna (rys. 3.29). Niech punkt C będzie chwilowym środkiem prędkości. Wówczas
|
VA ~ V CA |
vb = Vcb vd = vcd itd- |
(3.36) | |||
|
Stąd, i ze wzoru |
(3.27), wartości prędkości |
do> |
(3.37) | ||
|
vA = co-CA |
vb = co-CB vd = co-CD itd., |
w = — di |
► | ||
|
lub — = — |
= — itd. | ||||
|
CA CB |
CD |
Twierdzenie: Przyspieszenie dowolnego punktu figury płaskiej jest sumą przyspieszenia bieguna i przyspieszenia tego punktu wokół bieguna (rys. 3.30). A zatem
aM — aA + aAM aAM = aiAM + anAM (3.38)
azAM = ^-x AM a„AM =5x(5x AM) (3.39)
Ruch kulisty. Ciało O jest w ruchu kulistym, jeżeli istnieje jeden punkt ciała, którego prędkość jest równa zeru (rys. 3.31).
przyspieszenia a dowolnego P nktu M figury płaskiej (ruch płaski) wzglcdem bieguna A
Rys. 3.31. Ciało w ruchu kulistym J krawędź przecięcia płaszczyzn Oxy i Ot]Ę,
Wyszukiwarka
Podobne podstrony:
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
1tom059 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 120 jctórej: H— funkcja Heaviside’a, tj. H
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
więcej podobnych podstron