1tom052
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106
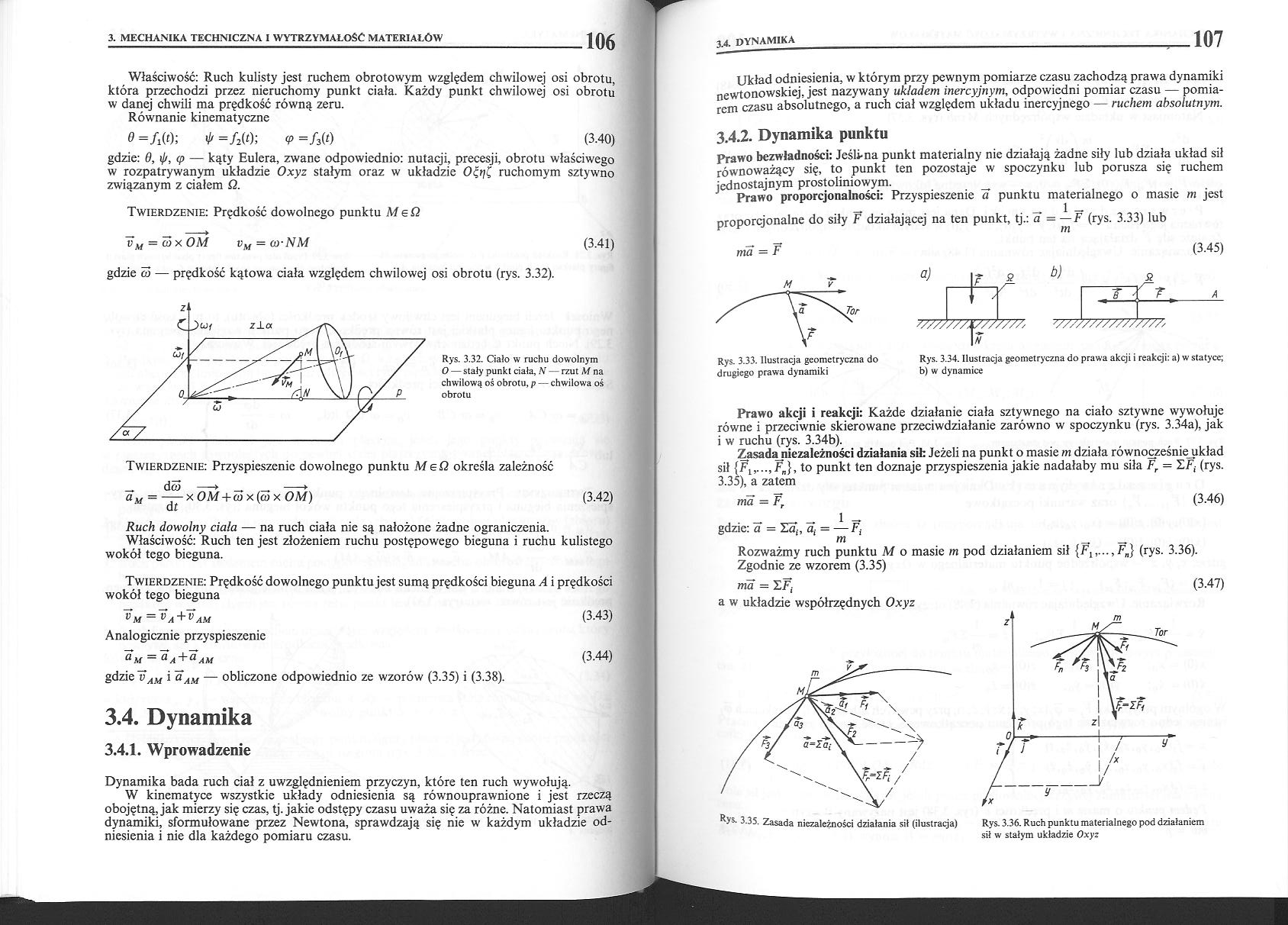
Właściwość: Ruch kulisty jest ruchem obrotowym względem chwilowej osi obrotu, która przechodzi przez nieruchomy punkt ciała. Każdy punkt chwilowej osi obrotu w danej chwili ma prędkość równą zeru.
Równanie kinematyczne
<l'=f2( 0; <P =fz(t) (3.40)
gdzie: 8, \p, <p — kąty Eulera, zwane odpowiednio: nutacji, precesji, obrotu właściwego w rozpatrywanym układzie Oxyz stałym oraz w układzie Oó/J ruchomym sztywno związanym z ciałem Q.
Twierdzenie: Prędkość dowolnego punktu Me £2
Um = cqxOM vm — q)-NM (3.41)
gdzie S — prędkość kątowa ciała względem chwilowej osi obrotu (rys. 3.32).

Rys. 3.32. Ciało w ruchu dowolnym O — stały punkt ciała, N rzut M na chwilową oś obrotu, p — chwilowa oś obrotu
Twierdzenie: Przyspieszenie dowolnego punktu MeQ określa zależność _ dS —-» _ _ —►
aM = —xOM + cox(a)xOM) (3.42)
Ruch dowolny ciała — na ruch ciała nie są nałożone żadne ograniczenia. Właściwość: Ruch ten jest złożeniem ruchu postępowego bieguna i ruchu kulistego wokół tego bieguna.
Twierdzenie: Prędkość dowolnego punktu jest sumą prędkości bieguna A i prędkości wokół tego bieguna
^m = Va+^am (3-43)
Analogicznie przyspieszenie
aM = aA + aAM (3.44)
gdzie ~vAM i aAM — obliczone odpowiednio ze wzorów (3.35) i (3.38).
3.4. Dynamika
3.4.1. Wprowadzenie
Dynamika bada ruch ciał z uwzględnieniem przyczyn, które ten ruch wywołują.
W kinematyce wszystkie układy odniesienia są równouprawnione i jest rzeczą obojętną, jak mierzy się czas, tj. jakie odstępy czasu uważa się za różne. Natomiast prawa dynamiki, sformułowane przez Newtona, sprawdzają się nie w każdym układzie odniesienia i nie dla każdego pomiaru czasu.
Układ odniesienia, w którym przy pewnym pomiarze czasu zachodzą prawa dynamiki newtonowskiej, jest nazywany układem inercyjnym, odpowiedni pomiar czasu — pomiarem czasu absolutnego, a ruch ciał względem układu inercyjnego — ruchem absolutnym.
3.4.2. Dynamika punktu
prawo bezwładności: Jeśli-na punkt materialny nie działają żadne siły lub działa układ sil równoważący się, to punkt ten pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
1 _
Prawo proporcjonalności: Przyspieszenie a punktu materialnego o masie m jest
proporcjonalne do siły F działającej na ten punkt, tj.: a — —F (rys. 3.33) lub
tria - F

Rys. 3.33. Ilustracja geometryczna do drugiego prawa dynamiki
(3.45)
b)

7777777717777777.*777).
Rys. 3.34. Ilustracja geometryczna do prawa akcji i reakcji: a) w statyce; b) w dynamice
Prawo akcji i reakcji: Każde działanie ciała sztywnego na ciało sztywne wywołuje równe i przeciwnie skierowane przeciwdziałanie zarówno w spoczynku (rys. 3.34a), jak i w ruchu (rys. 3.34b).
Zasadaniezależności działania sił: Jeżeli na punkt o masie m działa równo£ześnie układ sił {Fl,...,Fn}, to punkt ten doznaje przyspieszenia jakie nadałaby mu siła Fr = I/',- (rys. 3.35), a zatem
(3.46)
ma = F,
m
gdzie: a = Eaj, aj = — F(
Rozważmy ruch punktu M o masie m pod działaniem sił {F,,..., F„) (rys. 3.36). Zgodnie ze wzorem (3.35)
(3.47)
ma — ZF,
a w układzie współrzędnych Oxyz

Rys. 3.35. Zasada niezależności działania sił (ilustracja) Rys. 3.36. Ruch punktu materialnego pod działaniem
sił w stałym układzie Oxyz
Wyszukiwarka
Podobne podstrony:
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
1tom059 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 120 jctórej: H— funkcja Heaviside’a, tj. H
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
więcej podobnych podstron