1tom055

3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 112
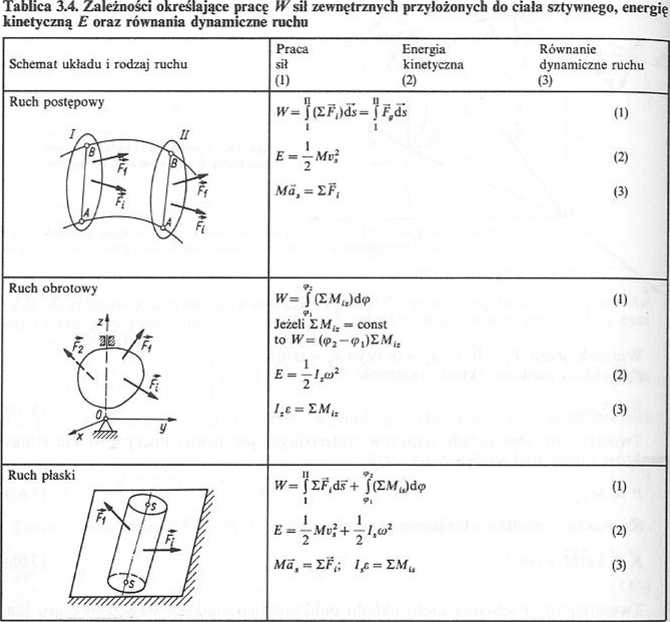
3.4.5. Zasada prac wirtualnych (przygotowanych)
Niech na układ nieswobodnych punktów materialnych z,),M„(x„; _y„; z„) będą
nałożone stacjonarne dwustronne więzy
fj(x 1, yt; zd y„; z„) = 0, j = 1 < n (3.69)
Liczbę s = 3n—m nazywa się ilością stopni swobody układu punktów. Zbiór niezależnych parametrów qvqs opisujących ruch układu punktów materialnych określa się jako współrzędne uogólnione.
Z powyższego wynika, że
= x, {qv..., y, = yt(qt,..., qj j ?0)
z,-=z,(«l.-.gJ); (i=l,..,») J
Na przykład współrzędne punktów A(xa; yA) i B(xb; yB) mechanizmu korbowego (rys. 3.43) spełniają równanie więzów
x2A+y2A = r2; yB = 0
j są funkcjami współrzędnej uogólnionej <p postaci
Xl = rcosę>; >;, = rsintp; xB = rcoscp+^/l2 — r2sin2ę>; = 0
Przesunięciem wirtualnym (możliwym) nieswobodnego układu punktów materialnych jest nazywane wyobrażalne, dowolnie małe, prostoliniowe, skierowane przemieszczenie układu, na które w danej chwili pozwalają więzy nałożone na układ. Na przykład przemieszczeniem wirtualnym pręta AB (rys. 3.44) jest jego obrót o nieskończenie mały kąt 5ę> wokół punktu O, a przemieszczeniem wirtualnym punktów A i B są odpowiednio wektory: Ssj,, 8sB. Ich wartości są równe: 6s,, = OAhtp, SsB = OBów.
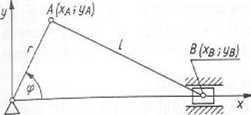
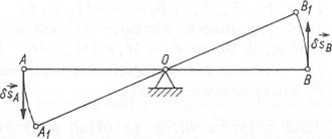
Rys. 3.43. Mechanizm korbowowodzikowy Rys. 3.44. Przemieszczenie wirtualne (ilustracja)
— przykład więzów stacjonarnych
dwustronnych
Ze wzoru (3.70) przez zróżniczkowanie względem czasu, zastąpienie formalne róż-niczek dx,-, dy-„ dz( przez 6xit §>,, 8zf oraz przyjęcie: 8.xt = x,z, 8y, = y.t, 8z; = ż,t (t — parametr, i = l,...,n); 8qs — q;r, (J = l,...,s) otrzymano
i, dxt
8x,.= £ -t-8^; ;= i vllj
Z zależności
8^=
;=i dcli
Sz; = I — §<?; J-lfy
(3.71)
Ssj = (8x,-; 8y,; 62,) = (x,t; yfT; ż,z)
wynika, że przesunięcia przygotowane są proporcjonalnie do prędkości możliwych punktów materialnych.
Więzy_ określone zależnością (3.69) nazywa się idealnymi, jeżeli suma prac reakcji więzów R,-, (i = 1,...,n) przy dowolnym przesunięciu wirtualnym 8sj, (i = 1jest równa zeru, a zatem
SR,-87, = IR,8SjCos(R,, 8sj) = 0 (3.72)
Zasada prac wirtualnych: Warunkiem koniecznym i wystarczającym równowagi układu sil działających na układ punktów materialnych z_więząrni stacjonarnymi, dwustronnymi i idealnymi jest,_aby suma prac sił zadanych {F,,...,F„} przy dowolnym przemieszczeniu wirtualnym {87;,..., 8s„} układu punktów materialnych równała się zeru, a zatem
EFiSs,- = IFi8.sicos(Ri, 87J = 0 (3.73)
Dla więzów jednostronnych (w (3.69) znak = zastępuje się <)
87,. = SFjSijCos(Rj, 87,) < 0 (3.74)
, Ogólne równanie dynamiki: Niech będzie dany układ punktów materialnych M\(xu y}; zt),..., iWn(x„; y„; z„) z więzami dwustronnymi, stacjonarnymi, idealnymi opisanymi zależnością (3.69). Zatem na każdy punkt materialny M; o masie m; działa siła zewnętrzna F;, reakcja więzów R; oraz siła bezwładności B,= —m^a^ czyli
fi + Rj+B. = 0, (i =!,...,«)
Poradnik inżyniera elektryka tom 1
Wyszukiwarka
Podobne podstrony:
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
1tom059 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 120 jctórej: H— funkcja Heaviside’a, tj. H
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
więcej podobnych podstron