1tom048
3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98
Wypadkową R można obrócić wokół prostej działania siły N o kąt 2it. W ten sposób otrzymujej>ię stożek tarcia o wysokości N, tworzącej R i promieniu podstawy T. Kąt 8 = <(R;N) jest nazywany katem tarcia dlatego, że
T=N tgg czyli /i = tgq (3.8)
Jeżeli współrzędna prędkości względnej ciał trących się jest większa od zera, to wtedy tarcie między ciałami nazywa się tarciem kinetycznym. W tym przypadku współczynnik tarcia H jest funkcją wartości u prędkości względnej u, a więc /i = f(u) a wartość siły tarcia
T= Nf(u) (3.9)
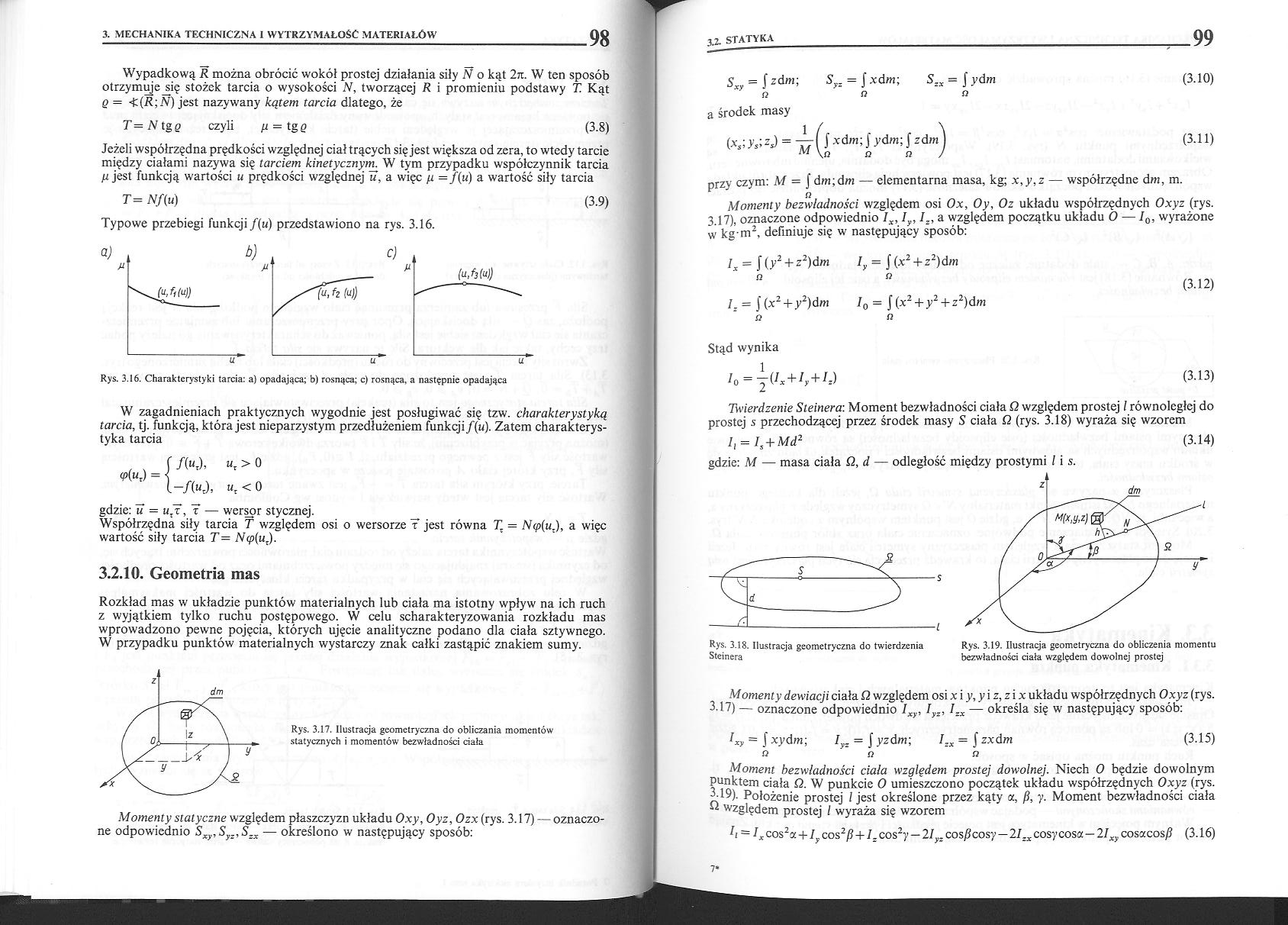
Typowe przebiegi funkcji f(u) przedstawiono na rys. 3.16.

Rys. 3.16. Charakterystyki tarcia: a) opadająca; b) rosnąca; c) rosnąca, a następnie opadająca
W zagadnieniach praktycznych wygodnie jest posługiwać się tzw. charakterystyką tarcia, tj. funkcją, która jest nieparzystym przedłużeniem funkcji f(u). Zatem charakterystyka tarcia
/(«,), «r > 0
-/(ut), u, < 0
gdzie: u = u,x, t — wersor stycznej.
Współrzędna siły tarcia T względem osi o wersorze t jest równa 71 = Ncp(ut), a więc wartość siły tarcia T = Nę(ut).
3.2.10. Geometria mas
Rozkład mas w układzie punktów materialnych lub ciała ma istotny wpływ na ich ruch z wyjątkiem tylko ruchu postępowego. W celu scharakteryzowania rozkładu mas wprowadzono pewne pojęcia, których ujęcie analityczne podano dla ciała sztywnego. W przypadku punktów materialnych wystarczy znak całki zastąpić znakiem sumy.
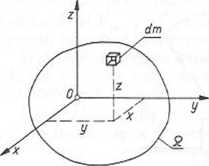
Rys. 3.17. Ilustracja geometryczna do obliczania momentów statycznych i momentów bezwładności ciała
Momenty statyczne względem płaszczyzn układu Oxy, Oyz, Ozx (rys. 3.17) — oznaczone odpowiednio Sxy, Sy,,S.x — określono w następujący sposób:
a środek masy
(3.11)
Sxy = f z Am; Syz = J xdm; Szx =
J ydm
a
(3.10)
(x,;y,;zj = I/(j[xdm;j/dm:j[zdm
przy czym: M = J dm;dm — elementarna masa, kg; x,y,z — współrzędne dm, m.
n
Momenty bezwładności względem osi 0x, Oy, Oz układu współrzędnych Oxyz (rys. 3.17), oznaczone odpowiednio Ix, Iy, a względem początku układu O —10, wyrażone w kg m2, definiuje się w następujący sposób:
10 = J (x2+y2+z2)dm n
(3.12)
Ix = \(y2+z2)Am n
lz = j(x2+y2)dm a
Iy = J (x2 + z2) Am a
Stąd wynika
(3.13)
/0 = —(Ix + Iy+I.)
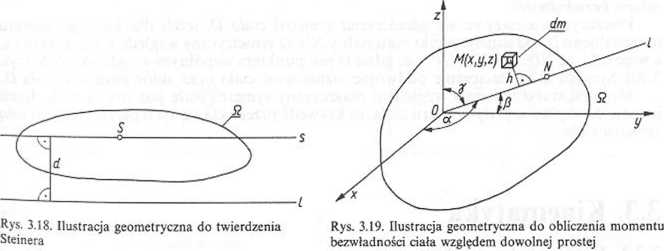
Twierdzenie Steinera: Moment bezwładności ciała Q względem prostej l równoległej do prostej s przechodzącej przez środek masy S ciała Q (rys. 3.18) wyraża się wzorem
!, = !, +Md2 (3.14)
gdzie: M — masa ciała Q, d — odległość między prostymi / i s.
Momenty dewiacji ciała Q względem osi x i y, y i r, z i x układu współrzędnych Oxyz (rys. 3.17) — oznaczone odpowiednio Ixy, Iy:, I.x — określa się w następujący sposób:
Ixy = f xyAm; Iyz = J yzdm; I.x = [ zxdm (3.15)
o n n
Moment bezwładności ciała względem prostej dowolnej. Niech 0 będzie dowolnym Punktom ciała Q. W punkcie O umieszczono początek układu współrzędnych Oxyz (rys. 3-19). Położenie prostej / jest określone przez kąty a, (1, y. Moment bezwładności ciała “ względem prostej l wyraża się wzorem
!i = Ix cos2ot+Iy cos2/?+Iz cos2y—2Iy, cos/?cosy—2Izx cosycosa—2Ixy cosacos/? (3.16)
7*
Wyszukiwarka
Podobne podstrony:
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom049 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 100 Równanie (3.16) można sprowadzić do
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
więcej podobnych podstron