1tom049
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 100
Równanie (3.16) można sprowadzić do postaci
Ixx2+Iyy2+IJz2—2Iyiyz—2Izxzx—2Ixyxy = 1 (3.17)
przez podstawienie: cos2« = I,x2, cos2/) = I,y2, cos2y = /,z2; przy czym x, y, z są współrzędnymi punktu N (rys. 3.19). Współczynniki lx, Iy, Ir równania (3.17) są wielkościami dodatnimi, natomiast 1,1, Ixy mogą być dodatnie, ujemne lub równe zeru. Obrazem geometrycznym równania (3.17)jest powierzchnia elipsoidy. Przez obrót układu współrzędnych wokół początku układu zależność (3.17) można doprowadzić do postaci
i ir z
= i
(3.18)
gdzie: A, B, C — stałe dodatnie, zależne od momentów bezwładności Ix, Iy, I..
Równanie (3.18) jest równaniem elipsoidy bezwładności, a osie tej elipsoidy są głównymi osiami bezwładności.
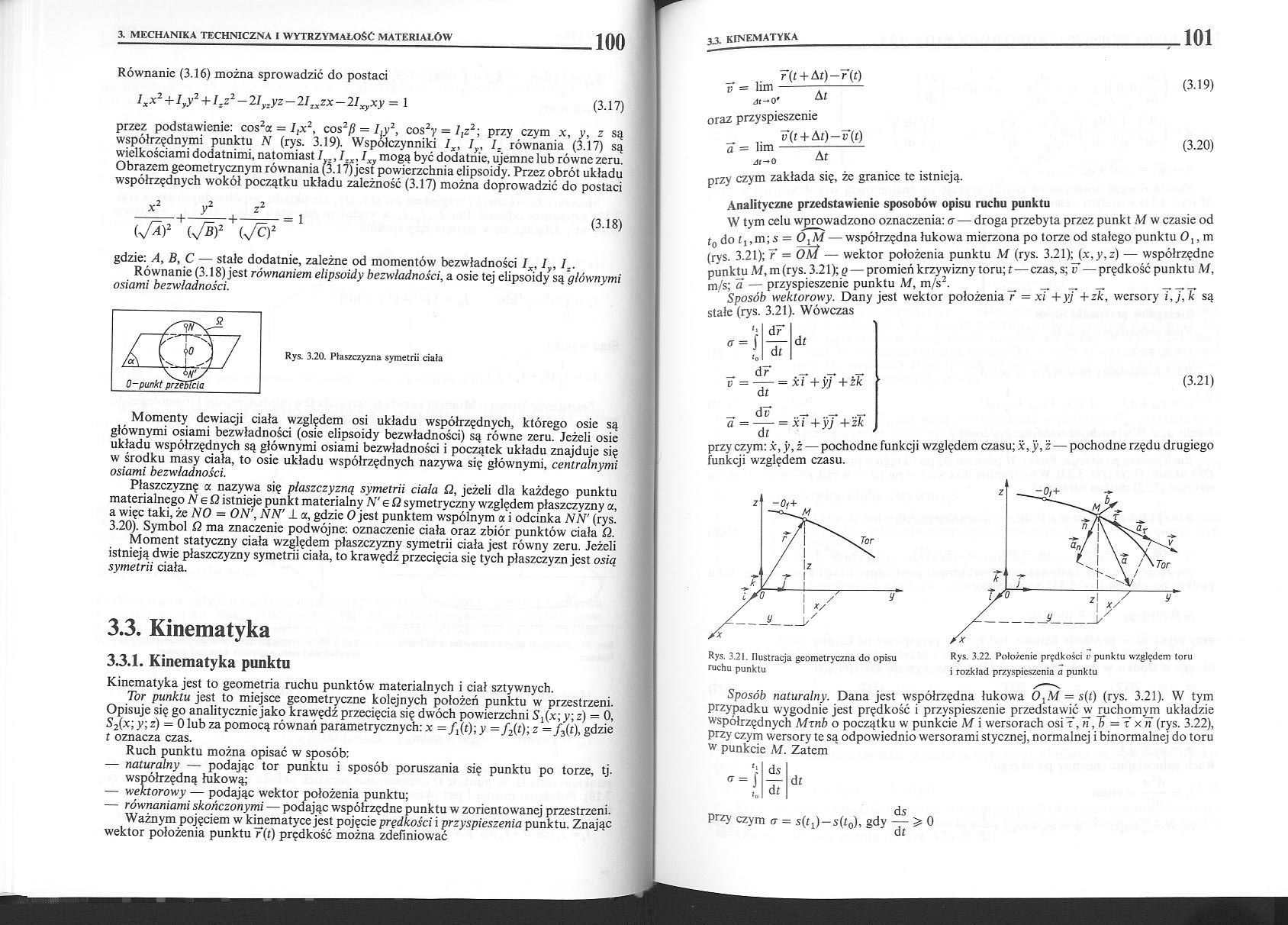
Rys. 3.20. Płaszczyzna symetrii ciała
Momenty dewiacji ciała względem osi układu współrzędnych, którego osie są głównymi osiami bezwładności (osie elipsoidy bezwładności) są równe zeru. Jeżeli osie układu współrzędnych są głównymi osiami bezwładności i początek układu znajduje się w środku masy ciała, to osie układu współrzędnych nazywa się głównymi, centralnymi osiami bezwładności.
Płaszczyznę a nazywa się płaszczyzną symetrii ciała O, jeżeli dla każdego punktu materialnego N e Q istnieje punkt materialny N' e Q symetryczny względem płaszczyzny a, a więc taki, że NO — ON', NN' 1 a, gdzie O jest punktem wspólnym a i odcinka NN' (rys. 3.20). Symbol Q ma znaczenie podwójne: oznaczenie ciała oraz zbiór punktów ciała Q.
Moment statyczny ciała względem płaszczyzny symetrii ciała jest równy zeru. Jeżeli istnieją dwie płaszczyzny symetrii ciała, to krawędź przecięcia się tych płaszczyzn jest osią symetrii ciała.
3.3. Kinematyka
3.3.1. Kinematyka punktu
Kinematyka jest to geometria ruchu punktów materialnych i ciał sztywnych.
Tor punktu jest to miejsce geometryczne kolejnych położeń punktu w przestrzeni. Opisuje się go analitycznie jako krawędź przecięcia się dwóch powierzchni Sj(x;y;z) = 0, S2(x;y;z) = 0 lub za pomocą równań parametrycznych: x = /j(t);y = /2(t); z =/3(t), gdzie t oznacza czas.
Ruch punktu można opisać w sposób:
— naturalny — podając tor punktu i sposób poruszania się punktu po torze, tj. współrzędną łukową;
— wektorowy — podając wektor położenia punktu;
— równaniami skończonymi — podając współrzędne punktu w zorientowanej przestrzeni. Ważnym pojęciem w kinematyce jest pojęcie prędkości i przyspieszenia punktu. Znając
wektor położenia punktu T(t) prędkość można zdefiniować

oraz przyspieszenie
F(l + At)—r(t)
(3.19)
przy czym zakłada się, że granice te istnieją.
Analityczne przedstawienie sposobów opisu ruchu punktu
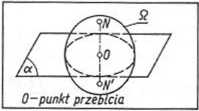
W tym celu wprowadzono oznaczenia: a—droga przebyta przez punkt M w czasie od t0 do t,,m;s = 01M — współrzędna łukowa mierzona po torze od stałego punktu O,, m (rys. 3.21); F = OM — wektor położenia punktu M (rys. 3.21); (x,y,z) — współrzędne punktu M, m (rys. 3.21); q — promień krzywizny toru; t ■—czas, s; F—prędkość punktu M, m/s; a — przyspieszenie punktu M, m/s2. __ _ _ _ ___
Sposób wektorowy. Dany jest wektor położenia r = xi +yj +zk, wersory i,j,k są stałe (rys. 3.21). Wówczas

(3.21)
_ dr
i; = — = xi +yj +zk
_ dF
a = —— = xi +yj +zk ćt
przy czym: x,y,ż — pochodne funkcji względem czasu; x, y, z—pochodne rzędu drugiego funkcji względem czasu.
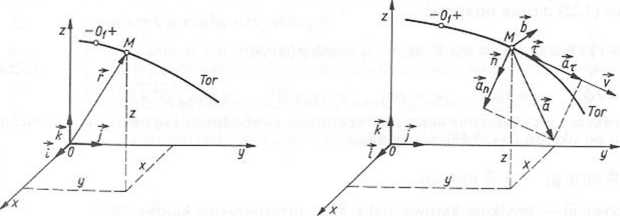
Rys. 3.2!. Ilustracja geometryczna do opisu ruchu punktu
Rys. 3.22. Położenie prędkości v punktu względem toru i rozkład przyspieszenia a punktu
Sposób naturalny. Dana jest współrzędna łukowa OlM — s(t) (rys. 3.21). W tym przypadku wygodnie jest prędkość i przyspieszenie przedstawić w ruchomym układzie współrzędnych Mznb o początku w punkcie M i wersorach osi z, n, b = r x n (rys. 3.22), przy czym wersory te są odpowiednio wersorami stycznej, normalnej i binormalnej do toru w punkcie M. Zatem
przy czym <r = sjtj)—s(l0), gdy — >0
Wyszukiwarka
Podobne podstrony:
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
więcej podobnych podstron