1tom045
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92
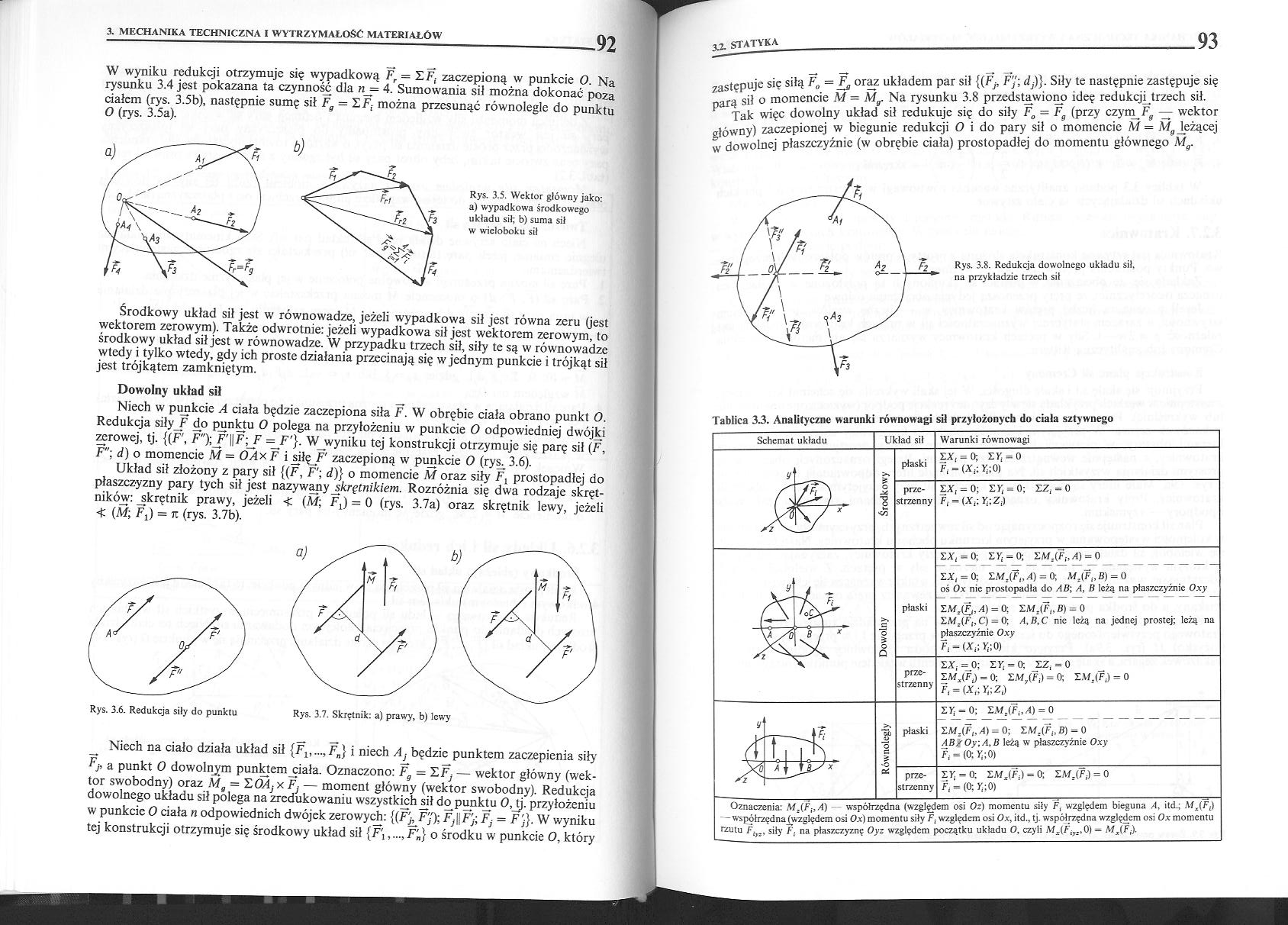
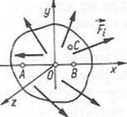
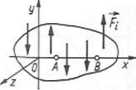
W wyniku redukcji otrzymuje się wypadkową Fr = £F, zaczepioną w punkcie O. Na rysunku 3.4 jest pokazana ta czynność dla n_= 4. Sumowania sil można dokonać poza ciałem (rys. 3.5b), następnie sumę sił F = ZF, można przesunąć równolegle do punktu O (rys. 3.5a).
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92
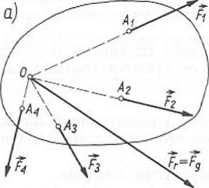
Rys. 3.5. Wektor główny jako: a) wypadkowa środkowego układu sił; b) suma sił w wiełoboku sił
Środkowy układ sił jest w równowadze, jeżeli wypadkowa sił jest równa zeru (jest wektorem zerowym). Także odwrotnie: jeżeli wypadkowa sił jest wektorem zerowym, to środkowy układ sił jest w równowadze. W przypadku trzech sił, siły te są w równowadze wtedy i tylko wtedy, gdy ich proste działania przecinają się w jednym punkcie i trójkąt sił jest trójkątem zamkniętym.
Dowolny układ sił
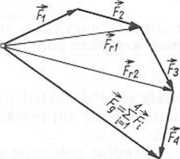
Niech w punkcie A ciała będzie zaczepiona siła F. W obrębie ciała obrano punkt O. Redukcja siły_F do punktu O polega na przyłożeniu w punkcie O odpowiedniej dwójki zerowej, tj. {(F', F");_F'||F;_F =_F'}. W_wyniku tej konstrukcji otrzymuje się parę sił (F, F"; d) o momencie M= OAxF i siłę F' zaczepioną w punkcie O (rysę 3.6).
Układ sił złożony z pary sił {(F, F'; d)} o momencie M oraz siły F, prostopadłej do płaszczyzny pary tych sił jest nazywany skrętnikiem. Rozróżnia się dwa rodzaje skrętników: jkrętnik prawy, jeżeli < (M; FJ = 0 (rys. 3.7a) oraz skrętnik lewy, jeżeli ł (M; Fj) = tt (rys. 3.7b).
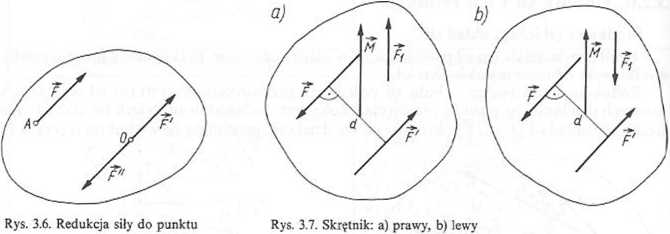
Niech na ciało działa układ sił {Fv..., F„} i niech Aj będzie punktem zaczepienia siły Fj< a punkt O dowolnym punktem ciała. Oznaczono: Fg = 2F; — wektor główny (wektor swobodny) oraz Mq = ’ZOAjxFj — moment główny (wektor swobodny). Redukcja dowolnego układu sił polega na zredukowaniu wszystkich sił do_punktu O, tj. przyłożeniu w punkcie O ciała n odpowiednich dwójek zerowych: {(Fj, F"); Fj||Fj; Fj = F)}. W wyniku tej konstrukcji otrzymuje się środkowy układ sil {Fj,..., F'„} o środku w punkcie O, który zastępuje się silą F„ = Fg oraz układem par sił {(F), F'j; dj)}. Siły te następnie zastępuje się oara sił o momencie M = Mg. Na rysunku 3.8 przedstawiono ideę redukcji trzech sił.
Tak więc dowolny układ sił redukuje się do siły F0 = Fg (przy czym_ Fg — wektor główny) zaczepionej w biegunie redukcji O i do pary sił o momencie M = Mg Jeżącej w dowolnej płaszczyźnie (w obrębie ciała) prostopadłej do momentu głównego Mg.
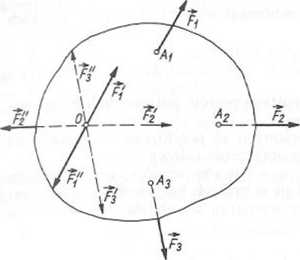
Rys. 3.8. Redukcja dowolnego układu sił. na przykładzie trzech sił
Tablica 33. Analityczne warunki równowagi sił przyłożonych do ciała sztywnego
Schemat układu
Układ sił
Warunki równowagi
płaski
IX, = o, iyt = o F, = (X,; Yit0)
prze
strzenny
IX, = 0; IV, = 0; IZ, = 0 F,^(Xt;Yi;Zi)
IX, = 0; zy;. = 0; ZMz(F„A) = 0
płaski
prze
strzenny
IX, = 0; IMt(F„A) = O, Mi{F„B) = 0
oś Ox nie prostopadła do AB; A, B leżą na płaszczyźnie Oxy
IMg{F,, A) = 0; IMt(F„ B) = 0
ZM.(F„ Q = 0; A,B,C nie leżą na jednej prostej; leżą na płaszczyźnie Oxy F, = {X,; y;-;0)
IX, = 0; IYt = 0; IZ, = 0
IMJF,) = O, IMy(F,) = 0; ZM.(F,) = 0
|
ZY,= 0; £Ms(F„/4) = 0 | ||
|
płaski |
IM.(F,% A) = 0; IMt(F,, B) = 0 | |
|
/lB^O> ;/ł, B leżą w płaszczyźnie Oxy | ||
|
-O |
F, = (0; y;;0) | |
|
prze- |
11^ = 0; IM x(Fj) = O, ZM.(F,) = 0 | |
|
strzenny |
Fj = (0; Y,;0) |
Oznaczenia: M.(F|;/1) współrzędna (względem osi Oz) momentu siły F, względem bieguna A, itd.; MX{F,) - współrzędna (względem osi Ox) momentu siły F, względem osi Ox, itd., tj. współrzędna względem osi Ox momentu rzutu Fiyz, siły F, na płaszczyznę Oyz względem początku układu O, czyli Mx(Fiys, 0) — MX(F,).
Wyszukiwarka
Podobne podstrony:
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
1tom049 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 100 Równanie (3.16) można sprowadzić do
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
więcej podobnych podstron