1tom054
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110
Rys. 3.40. Ilustracja geometryczna do pracy sił pola przy Rys. 3.41. Praca sił ziemskiego pola ruchu punktu po krzywej k (suma prac elementarnych) grawitacyjnego (ilustracja)
Zasada równoważności energii kinetycznej i pracy: Przyrost energii kinetycznej punktu materialnego przy przesunięciu od punktu A do punktu B jest równy pracy sit na tym przesunięciu. A zatem

Potencjałem pola sił F = (P;Q;R) nazywa się funkcję skalarną ę(x,y,z) (jeżeli istnieje) taką, że



(3.60)
Twierdzenie: Pole sił F = (P; Q; R) jest polem sił potencjalnych wtedy i tylko wtedy,
gdy
8P_ = dQ = ÓR dP_ = 3R
dy Sx ’ 8z dy’ dz 8x
Energia potencjalna Ev = — ip(x; y, z).
Zasada zachowania energii: W potencjalnym polu sił suma energii kinetycznej i potencjalnej jest stała, czyli E+Ev = const.
3.4.4. Dynamika układu punktów materialnych
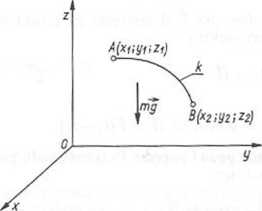
Rozważmy układ n punktów materialnych M,(x,; y,; zj,..., M„{x„; y„; z„) przedstawiony na rys. 3.42. Oznaczenia: m; — masa punktu Mf; Ft — suma sił zewnętrznych przyłożonych do M{, R; — suma sił wewnętrznych przyłożonych do M;, S(x^ ys; zs) — środek masy punktów materialnych.
Równanie ruchu i-tego punktu ma postać
= F,+R i (i = 1,n) (3.62)
Zasada ruchu środka masy: Środek masy układu punktów materialnych porusza się jak swobodny punkt materialny, o masie równej sumie mas wszystkich punktów, pod działaniem siły równej sumie sił zewnętrznych, a zatem
(3.63)
Ma, = Fg
gdzie: M = Zą-; Fg = £F(; ERf = 0.
Rys. 3.42. Nieswobodny układ punktów materialnych po uwolnieniu od więzów
Wniosek: jeżeli Fg = 0, to as = 0, czyli vs = const.
Pęd układu punktów określa zależność
P lim, o, (3.64)
Twierdzenie: Pęd układu punktów materialnych jest równy iloczynowi sumy mas punktów i prędkości środka masy, czyli
P = Mvs (3.65)
Kręt układu punktów określa się ze wzoru
K = I OM, x (muj) (3.66)
Twierdzenie: Pochodna krętu układu punktów materialnych względem czasu jest równa sumie momentów sił zewnętrznych, przy czym moment i kręt są obliczone
względem stałego, tego samego punktu (rys. 3.42), tj. K0 = M lub w formie równoważnej
w Oxyz
dd K\ dt ’ dt ’ dt /
= (Mx; My; M.)
(3.67)
bo ZOAixRi = 0.
i ^3 ą3?*3 r®wnowa^no*c' energ" kinetycznej i pracy: Dla układu punktów materialnych
W"A,Bi (3.68)
gdzie: EBi — energia kinetyczna punktu M, w położeniu Bp, EAl — energia kinetyczna Punktu M,■ w położeniu A,-; W'AtBl — praca siły zewnętrznej F, przyłożonej do punktu Mf przy przemieszczeniu po krzywej k; od punktu A- do Bp WAlBl— praca siły wewnętrznej R , P^ytożonej do M, przy przemieszczeniu po krzywej ki od Ai do Bt.
W przypadku ciała sztywnego wc wzorze (3.68) ostatni składnik po prawej stronie jest równy zeru.
n, ,f°dstawowe wzory określające pracę, energie kinetyczną oraz równania dynamiczne ruchu podano w tabl. 3.4.
Wyszukiwarka
Podobne podstrony:
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
1tom059 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 120 jctórej: H— funkcja Heaviside’a, tj. H
1tom049 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 100 Równanie (3.16) można sprowadzić do
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
więcej podobnych podstron