1tom050
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102
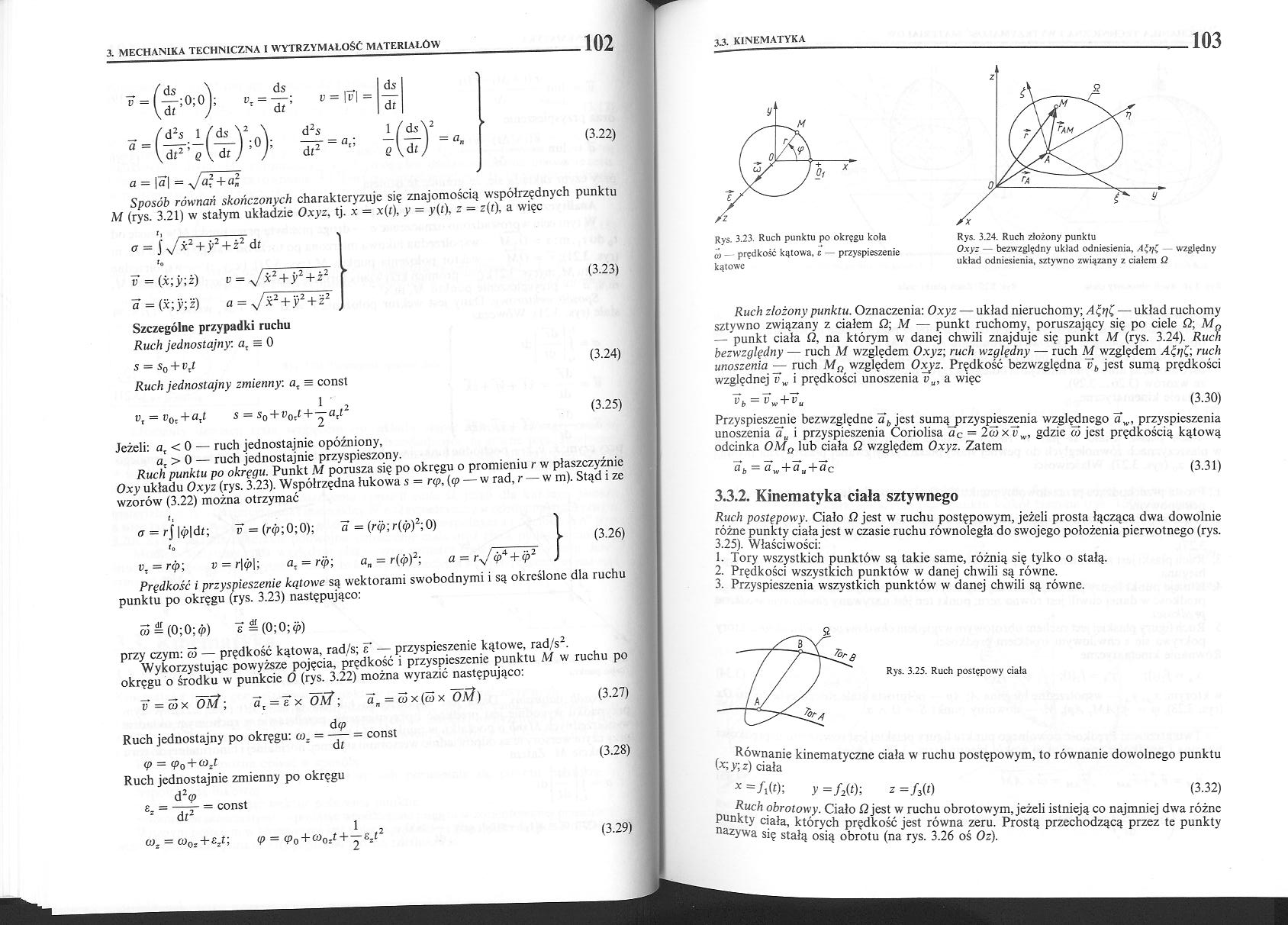
Sposób równań skończonych charakteryzuje się znajomością współrzędnych punktu M (rys. 3.21) w stałym układzie Oxyz, tj. x = x(t), y = y(f), z — z(f), a więc
(3.22)
o = j N/x2 + j;2 + ż2 dt
F = (x;y;ż) v = ,/x2+j>2 + ż2 F = (x;j;;z) u = yFTp+F _
Szczególne przypadki ruchu
Ruch jednostajny: a. = 0 s = s0 + v,t
Ruch jednostajny zmienny: a, = const
1 ,
v, = v0t+a,t s = s0 + v0,t + ja,t
(3.23)
(3.24)
(3.25)
Jeżeli: a, < 0 — ruch jednostajnie opóźniony,
at > 0 — ruch jednostajnie przyspieszony.
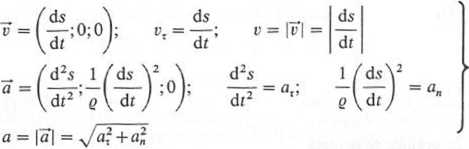
Ruch punktu po okręgu. Punkt M porusza się po okręgu o promieniu r w płaszczyźnie Oxy układu Oxyz (rys. 3.23). Współrzędna łukowa s = rip, (ip — w rad, r — w m). Stąd i ze wzorów (3.22) można otrzymać

v = (r<p;0;0);
a = (rip;r(<p)2; 0)
► (3.26)
v, = rę; v = r\ij>\; a. = rip; an = r((p)2; a = rj tpA + if>2 ,
Prędkość i przyspieszenie kątowe są wektorami swobodnymi i są określone dla ruchu punktu po okręgu (rys. 3.23) następująco:
ćo = (0;0;ę>) 7 = (0;0;qż)
przy czym: S — prędkość kątowa, rad/s; F — przyspieszenie kątowe, rad/s2.
Wykorzystując powyższe pojęcia, prędkość i przyspieszenie punktu M w ruchu po okręgu o środku w punkcie O (rys. 3.22) można wyrazić następująco:
tf = S x O A?; a,=Tx O A?; ~an — S x (5 x 0A?) (3.27)
dtp
Ruch jednostajny po okręgu: co. = = const
<P = <Po+o)zt (3.28)
Ruch jednostajnie zmienny po okręgu d2<p
g. = —— = const dt2
1 2
ip = q>o+co0.t+—&st
co. = co0.+£.t;
(3.29)
M
X
Rys. 3.23. Ruch punktu po okręgu koła ^ - prędkość kątowa, e — przyspieszenie kątowe
z
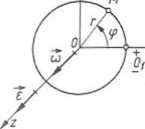
Rys. 3.24. Ruch złożony punktu
Oxyz — bezwzględny układ odniesienia, względny
układ odniesienia, sztywno związany z ciałem S2
Ruch złożony punktu. Oznaczenia: Oxyz — układ nieruchomy; — układ ruchomy sztywno związany z ciałem Q; M — punkt ruchomy, poruszający się po ciele Q, Mn — punkt ciała £2, na którym w danej chwili znajduje się punkt M (rys. 3.24). Ruch bezwzględny — ruch M względem Oxyz; ruch względny — ruch M względem /łó/£; ruch unoszenia — ruch MS1 względem Oxyz. Prędkość bezwzględna ~vb jest sumą prędkości względnej ~vw i prędkości unoszenia vu, a więc
~vb = v„+~vu (3.30)
Przyspieszenie bezwzględne ab jest sumą_przyspieszenia względnego <?„, przyspieszenia unoszenia au i przyspieszenia Coriolisa ac = 2tóxvw, gdzie to jest prędkością kątową odcinka OMQ lub ciała Q względem Oxyz. Zatem
ab = aw+’au+ac (3.31)
3.3.2. Kinematyka ciała sztywnego
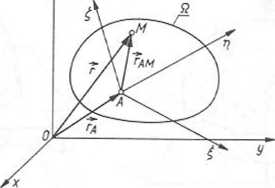
Ruch postępowy. Ciało Q jest w ruchu postępowym, jeżeli prosta łącząca dwa dowolnie różne punkty ciała jest w czasie ruchu równoległa do swojego położenia pierwotnego (rys. 3.25). Właściwości:
1. Tory wszystkich punktów są takie same, różnią się tylko o stałą.
2. Prędkości wszystkich punktów w danej chwili są równe.
3. Przyspieszenia wszystkich punktów w danej chwili są równe.
g
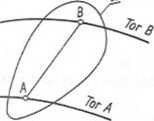
Rys. 3.25. Ruch postępowy ciała
Równanie kinematyczne ciała w ruchu postępowym, to równanie dowolnego punktu

Ruch obrotowy. Ciało £2 jest w ruchu obrotowym, jeżeli istnieją co najmniej dwa różne punkty ciała, których prędkość jest równa zeru. Prostą przechodzącą przez te punkty używa się stałą osią obrotu (na rys. 3.26 oś Oz).
Wyszukiwarka
Podobne podstrony:
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
1tom059 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 120 jctórej: H— funkcja Heaviside’a, tj. H
1tom049 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 100 Równanie (3.16) można sprowadzić do
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
więcej podobnych podstron