1tom058

3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118
Skręcanie prętów okrągłych
Pręt jest skręcany, jeżeli są przyłożone do niego pary sił działające w płaszczyznach prostopadłych do jego osi. Momentem skręcającym Ms w przekroju poprzecznym pręta w punkcie x (rys. 3.50a) nazywa się wektor
K(x) M
t MixH(x-at); 0; 0
(3.92)
przy czym: H — funkcja Heaviside’a, tj. H(x—ai) = 1 dla x > at oraz II(x—aj = 0 dla x < a(; M,- = (Mix\0; 0) — moment skręcającej pary sił przyłożonej w punkcie at elementu.
Przy stałej prędkości kątowej pręta zakłada się, że £ M {aj = 0 na całej długości pręta.
i= i

Rys. 3.50. Skręcanie: a) obciążenie parami sił elementu; b) przykład wałka o przekroju kołowym; c) wykres współrzędnej momentu skręcającego
Na rysunku 3.50c jest pokazany rozkład współrzędnej Msx(x) = [H(x—a2)~ —H(x—al)']Ms momentów skręcających Ms(ax) i Ms(a2) przyłożonych do pręta (rys. 3.50b), przy czym Ms = |Ms(a2)| = |jVf(a,)|.
Wprowadza się oznaczenie
*= max |Ms(x)| ;
= max
0 « X < i
X MizH(x-ad
(3.93)
w' którym: l — długość pręta, Ms{x) — moment wg wzoru (3.92).
Maksymalne naprężenia styczne w przekroju pręta (rury) nie mogą przekraczać naprężeń dopuszczalnych
= "i-s < fe (3.94)
W0
gdzie: W0 — wskaźnik wytrzymałości na skręcanie, m3, przy czym W() = jid3/32 dla pręta o średnicy d; Wę = n(D*—dA)/\6D dla rury o średnicy zewnętrznej D i wewnętrznej d.
Kąt skręcania ip części pręta zawartego między przekrojami poprzecznymi w punktach x, i x wyraża się wzorem (rys. 3.50a)
1 Mb , *r ZMixH(x-a,) j
(3.95)
<p(x) = trr<ix = J-77-dx
v ; Gd0 V GJg
ad/ie: Ms(x) = (M„; 0; 0) — patrz wzór (3.92); G — moduł przekształcenia postaciowego, N/m^; Jo — biegunowy moment bezwładności przekroju poprzecznego pręta, m4
Uwaga: J/(x)H(x1)dx = (F(x)-F(xl))H(xi) (3.96)
X,
j:
przy czym F(x) = J f(x)dx.
Wniosek: jeżeli GJ0 = const oraz Msx{x) = const w przedziale <x,, x>, to
(3.97)
Ms ,
<p(.x) = — (x-x.)
(jJq
Jednostkowy kąt skręcania pręta (rury), wyrażony w rad/m, musi spełniać warunek
(3.98)
1 71
max l<P(-x)l ^ ‘Piiop = T'777T o osi i oo
Zginanie
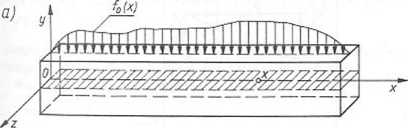
Element jest zginany, jeżeli siły zewnętrzne redukują się do pary sił leżącej w płaszczyźnie przechodzącej przez oś elementu.
Płaszczyzna obciążeń jest to płaszczyzna, w której znajdują się siły zewnętrzne. Zginanie proste zachodzi wówczas, gdy płaszczyzna obciążeń pokrywa się z płaszczyzną symetrii elementu (belki).
|
b) y | |||
|
am | |||
|
^o-(0;Ro;0) |
Rfr(0;RA | ||
Rys. 3.51. Proste zginanie elementu: a) rozkład obciążeń; b) przykład belki zginanej
Momentem gnącym M„(x) w przekroju poprzecznym belki w punkcie x (rys. 3.51a) nazywa się wektor opisany zależnością
j= 1
Mg(x) 1 jo; 0; £ (x-ai)Fi>.H(x-ai)- £ MJZH(x-bj)+ £ ~C,)2 ff(x-ej-
(3.99)
■H(x —cs+1) )q
Wyszukiwarka
Podobne podstrony:
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom059 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 120 jctórej: H— funkcja Heaviside’a, tj. H
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom047 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 963.2.8. Środek sil równoległych Niech na
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
więcej podobnych podstron