1tom047
3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 96
3.2.8. Środek sil równoległych
Niech na ciało sztywne działa układ sił równoległych i niech AJ będzie punktem
zaczepienia siły Fj, (j = IZakłada się, że siły nie będą przesuwane wzdłuż ich prostych działania.
Środkiem dwóch sil równoległych jest nazywany punkt przecięcia się prostej działania wypadkowej tych sił z prostą łączącą początki sił.
Z tej definicji oraz konstrukcji wyznaczania prostej działania dwóch sił równoległych wynika algorytm wyznaczania środka układu sił równoległych.
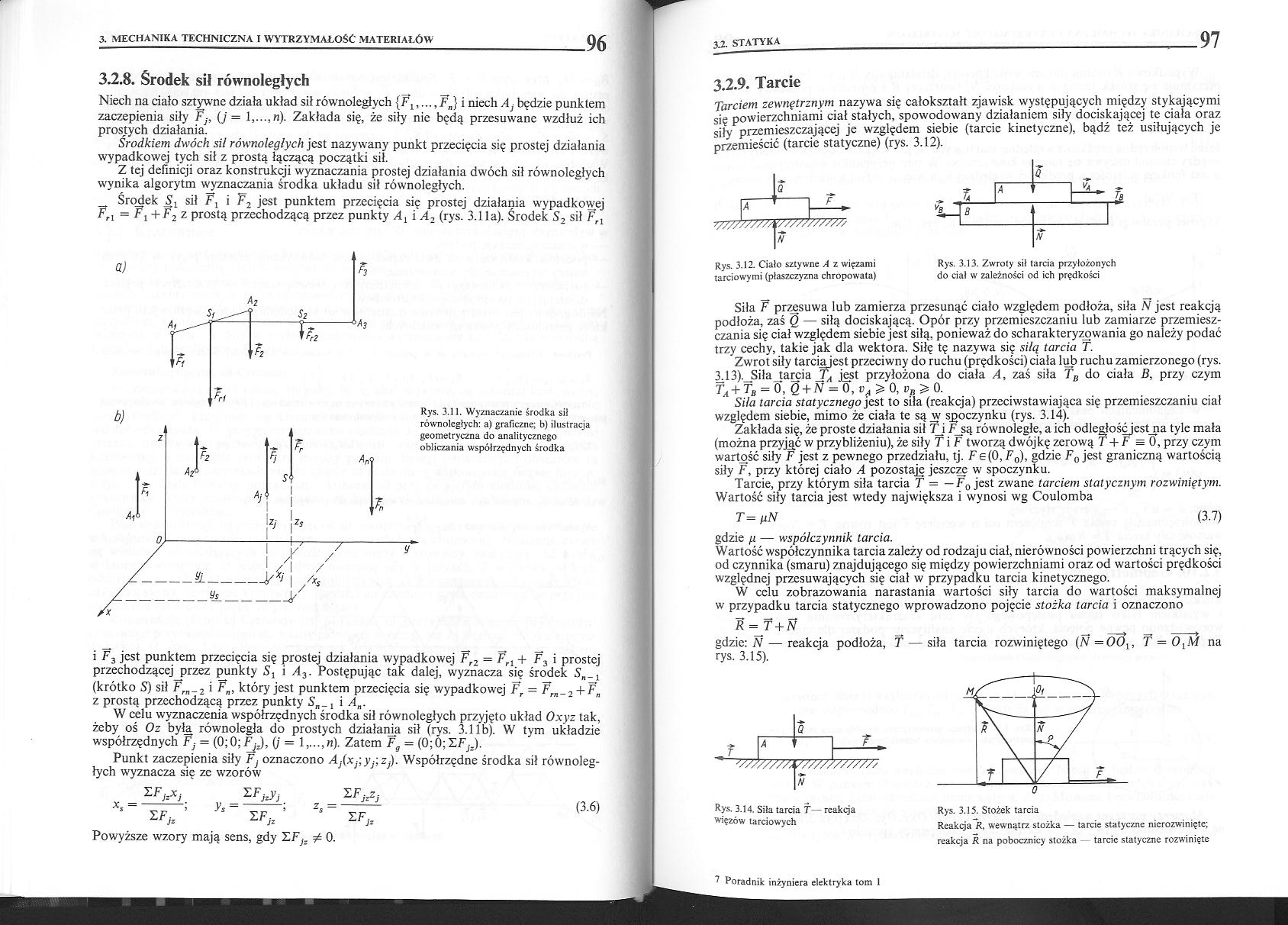
__ Środek S1 sił Fl i F2 jest punktem przecięcia się prostej działania wypadkowej Fn = F, + F, z prostą przechodzącą przez punkty A, i A2 (rys. 3.11 a). Środek S2 sił Frl
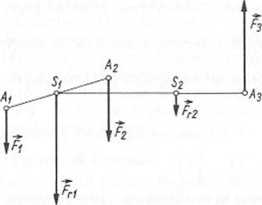
Rys. 3.11. Wyznaczanie środka sil równoległych: a) graficzne; b) ilustracja geometryczna do analitycznego obliczania współrzędnych środka
i Fj jest punktem przecięcia się prostej działania wypadkowej Fr2 = Frl + F, i prostej przechodzącej przez punkty i A3. Postępując tak dalej, wyznacza się środek S„_, (krótko Sj sił F,„_2 i F„, który jest punktem przecięcia się wypadkowej F, = F,„_2 + F„ z prostą przechodzącą przez punkty S„_, i A„.
W celu wyznaczenia współrzędnych środka sił równoległych przyjęto układ Oxyz tak, żeby oś Oz była równoległa do prostych działania sił (rys. 3.1 lb). W tym układzie współrzędnych F; = (0;0; kjJ, (j = 1Zatem Fg = (0;Ó;£FJ=).
Punkt zaczepienia siły Fj oznaczono Aj(Xj; yy, z^. Współrzędne środka sił równoległych wyznacza się ze wzorów
y* =
ZFj-J;
ZFjSj
Z.F,,
(3.6)
Powyższe wzory mają sens, gdy ZFJS # 0.
3.2.9. Tarcie
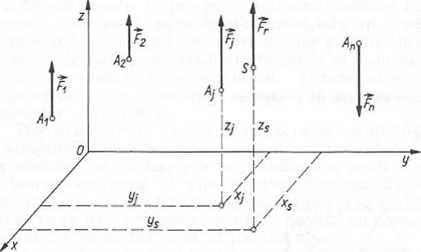
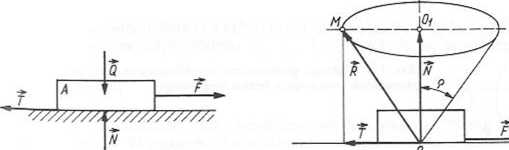
Tarciem zewnętrznym nazywa się całokształt zjawisk występujących między stykającymi się powierzchniami ciał stałych, spowodowany działaniem siły dociskającej te ciała oraz siły przemieszczającej je względem siebie (tarcic kinetyczne), bądź też usiłujących je przemieścić (tarcie statyczne) (rys. 3.12).
Rys. 3.12. Ciało sztywne A z więzami tarciowymi (płaszczyzna chropowata)
Rys. 3.13. Zwroty sił tarcia przyłożonych do ciał wr zależności od ich prędkości
Siła F przesuwa lub zamierza przesunąć ciało względem podłoża, siła N jest reakcją podłoża, zaś Q — siłą dociskającą. Opór przy przemieszczaniu lub zamiarze przemieszczania się ciał względem siebie jest siłą, ponieważ do scharakteryzowania go należy podać trzy cechy, takie jak dla wektora. Siłę tę nazywa się silą tarcia T.
Zwrot siły tarciajest przeciwny do ruchu (prędkości) ciała lub ruchu zamierzonego (rys. 313)._Siła tarcia TA jest przyłożona do ciała A, zaś siła TB do ciała B, przy czym Ta + Tb = 0, Q + N == 0, > 0, vB > 0.
Siła tarcia statycznego jest to siła (reakcja) przeciwstawiająca się przemieszczaniu ciał względem siebie, mimo że ciała te są w spoczynku (rys. 3.14).
Zakłada się, że proste działania sił Tj F_są równolegle, a ich odlcglośćjcstjra tyle mała (można przyjąć w przybliżeniu), że siły T i F tworzą dwójkę zerową T+F = 0, przy czym wartość siły F jest z pewnego przedziału, tj. Fe(0, F0), gdzie F0 jest graniczną wartością siły F, przy której ciało A pozostaje jeszcze w spoczynku.
Tarcie, przy którym siła tarcia T = — F0 jest zwane tarciem statycznym rozwiniętym. Wartość siły tarcia jest wtedy największa i wynosi wg Coulomba
(3.7)
T= pN
gdzie fi — współczynnik tarcia.
Wartość współczynnika tarcia zależy od rodzaju ciał, nierówności powierzchni trących się, od czynnika (smaru) znajdującego się między powierzchniami oraz od wartości prędkości względnej przesuwających się ciał w przypadku tarcia kinetycznego.
W celu zobrazowania narastania wartości siły tarcia do wartości maksymalnej w przypadku tarcia statycznego wprowadzono pojęcie stożka tarcia i oznaczono
R = T + N
gdzie: N — reakcja podłoża, T — siła tarcia rozwiniętego (N = OOl, T = 0,3-/ na rys. 3.15).
o
Rys. 3.14. Siła tarcia T— reakcja więzów tarciowych
Rys. 3.15. Stożek tarcia
Reakcja R„ wewnątrz stożka — tarcie statyczne nierozwinięte; reakcja R na pobocznicy stożka tarcie statyczne rozwinięte
7 Poradnik inżyniera elektryka tom 1
Wyszukiwarka
Podobne podstrony:
1tom044 X MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 903.2.5. Teoria par sił Momentem siły wzglę
1tom042 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 86 Punktem materialnym nazywa się ciało, k
1tom043 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 88 Tablica 3.1 (cd.) Ciała nieswobodne
1tom045 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 92 W wyniku redukcji otrzymuje się wypadko
1tom046 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 94 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ
1tom048 3. MECHANIKA TECHNICZNA 1 WYTRZYMAŁOŚĆ MATERIAŁÓW 98 Wypadkową R można obrócić wokół prostej
1tom049 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 100 Równanie (3.16) można sprowadzić do
1tom054 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 110 Rys. 3.40. Ilustracja geometryczna do
1tom060 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 122 gdzie: E — moduł Younga, N/m2; Jmi„ —
1tom002 SPIS TREŚCI 6 3. Mechanika techniczna i wytrzymałość materiałów - 85 prof.
1tom050 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 102 Sposób równań skończonych charakteryzu
1tom051 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 104 Właściwości: 1. Tore
1tom052 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 106 Właściwość: Ruch kulisty jest ruchem o
1tom053 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 108 mx = I.Flx; my = XFiy; mż = ZFiz
1tom055 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 1123.4.5. Zasada prac wirtualnych
1tom056 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 114 Równanie to wyraża zasadę
1tom057 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 116 Stąd po wyeliminowaniu Ms średnica
1tom058 3. MECHANIKA TECHNICZNA I WYTRZYMAŁOŚĆ MATERIAŁÓW 118 Skręcanie prętów okrągłych Pręt jest
więcej podobnych podstron