P1080300
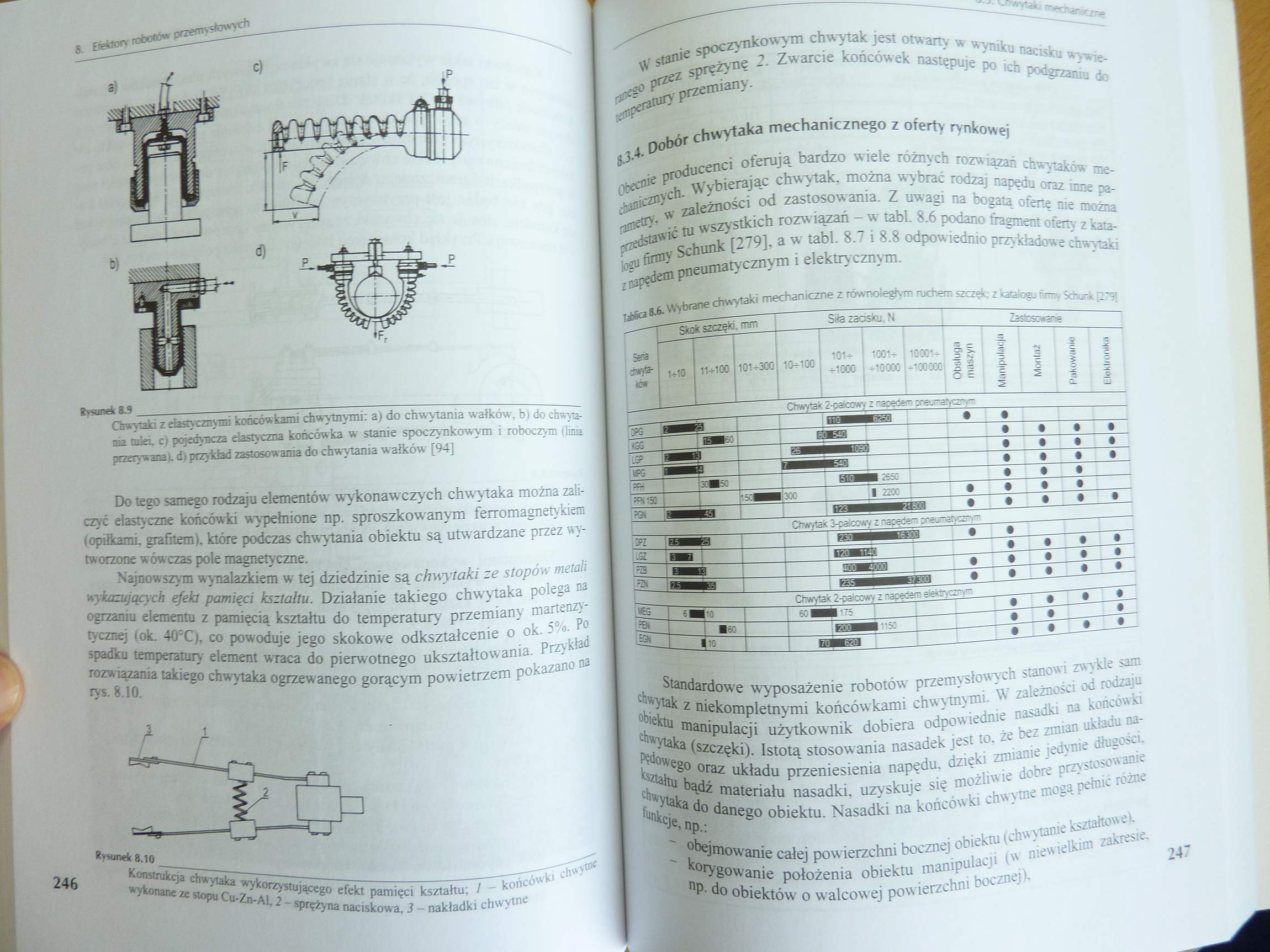
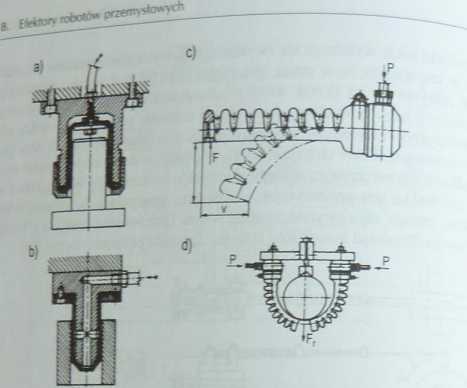
Rysunek 3-9____
Chwytaki z eterycznymi końcówkami chwytnymi: a) do chwytania wałków, b) do chwytania mJei, c) pojedyncza elastyczna końcówka w stanie spoczynkowym i roboczym (Ina przerywana), d) przykład zastosowania do chwytania wałków [94]
Do tego samego rodzaju elementów wykonawczych chwytaka można zaliczyć elastyczne końcówki wypełnione np. sproszkowanym ferro magnetykiem (opiłkami, grafitem), które podczas chwytania obiektu są utwardzane przez wytworzone wówczas pole magnetyczne.
Najnowszym wynalazkiem w tej dziedzinie są chwytaki ze stopów metali wykazujących efekt pamięci kształtu. Działanie takiego chwytaka polega na ogrzaniu elementu z pamięcią kształtu do temperatury przemiany martenzy-tycznej (ok. 40°C), co powoduje jego skokowe odkształcenie o ok. 5%. Po spadku temperatury element wraca do pierwotnego ukształtowania. Przykład rozwiązania takiego chwytaka ogrzewanego gorącym powietrzem pokazano na iys. 8.10.
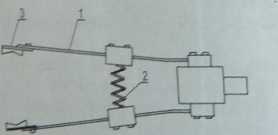
Rysunek 8.10_________
Konstrukcja chwytaka wykorzystującego efekt pamięci kształtu; 1 - końcówki chwy01 246 wykonane ze stopu Cu-Zn-Al, 2 -sprężyna naciskowa, 3-nakładki chwytne
W stanie spoczynkowym chwytak jest otwarty w wyniku nacisku wvwie-prz®z sprężynę 2. Zwarcie końców ek następuje po ich podgrzaniu do ^eiatury przemiany.
*3
4. Dobór chwytaka mechanicznego z oferty rynkowej
w zależności od zastosowania. Z uwagi na bogatą ofeite nie można
Obecnie producenci oferują bardzo wiele różnych rozwiązań chwytaków me-cnaaicznycli. Wybierając chwytak, można wybrać rodzaj napędu oraz inne pa-
-gfjstawić tu wszystkich rozwiązań — w tabl. 8.6 podano fragment oferty z katalogu finny Schunk [279], a w tabl. 8.7 i 8.8 odpowiednio przykładowe chwytaki . Spędem pneumaty cznym i elektrycznym.
Tjjljn 8.6. Wybrane chwytaki mechaniczne z równole^ym ruchem szczęk; z kacałogj finny Schunk P79|
Stok szczęki, mm
|
Siła zacisku, N | ||
|
1 im* ■™*m\ *1000 I |
1001* *10000 |
*100000 |
Chwytak 2-pałcowy z napędem pneunatyczr";
Zastosowane
wo
Sae
dwf/te-
«ć»
11*100
101*300
|
CFG |
I |
• | ||||||
|
AaG |
I |
r |
- |
ESI • • |
• |
• | ||
|
_4 |
— |
MBS! • • |
• |
• | ||||
|
|HFG ' |
apBK |
i |
— |
ES • • |
• |
• | ||
|
fflł I |
30M50 ] |
. 1 |
9BM92S50 | • • |
• | ||||
|
IPRI150 l _L__! |
309_ |
1 2200 i • • • |
• | |||||
|
i!ÓTI |
B |
_ |
ME9EE • • • |
• |
• | |||
|
— |
Chwytak 3-paicowy z napędem pneunaycznym | |||||||
|
jOPZ |
h_ |
9 |
mMH£lj] • • | |||||
|
IH |
mm |
-------- • • |
• |
• | ||||
|
|P2B |
hmi |
L_ |
sn • • • |
• |
• | |||
|
■m |
HM |
■ |
EEMH9 • • • |
• |
• | |||
|
Chwytak 2-palcowy z napędem elektrycznym | ||||||||
|
5H |
10 |
I izmm 75 ii • • |
• |
• | ||||
|
[ FEN |
H 50 | • • |
• | ||||||
|
|9|_ |
j |
Łs_ |
wem • • |
• |
• | |||
Standardowe wyposażenie robotów przemysłowych stanowi zwykle sam chwytak z niekompletnymi końcówkami chwytnymi. W zależności od rodzaju obiektu manipulacji użytkownik dobiera odpowiednie nasadki na końcówki chwytaka (szczęki). Istotą stosowania nasadek jest to, że bez zmian układu napędowego oraz układu przeniesienia napędu, dzięki zmianie jedynie długości, kształtu bądź materiału nasadki, uzyskuje się możliwie dobre przystosowanie chwytaka do danego obiektu. Nasadki na końcówki chwytne mogą pełnić różne
frakcje, np.:
- obejmowanie całej powierzchni bocznej obiektu (chwytanie kształtowe).
- korygowanie położenia obiektu manipulacji (w niewielkim zakresie, np. do obiektów o walcowej powierzchni bocznej).
Wyszukiwarka
Podobne podstrony:
DSC00728 (11) Konstrukcja chwytaków do wałków z końcówkami chwytnymi w postaci kłów: a) z siłownikie
Image 127 130 Do grupy podstawowych parametrów chwytaków zaliczamy: silę chwytania - siła, z jaką ko
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
DSC00807 (11) a Rys. Chwytak z elastycznymi końcówkami przystosowany do chwytania wałków za powierzc
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
P1080302 Rysunek 8.yfflMllljL : i. _ Dobierany chwytak firmy Schunk z serii LGW: a
P1080303 Rysunek 8.13_ Algorytm projektowania chwytaków - ustalenie warunków począ
Image 116 119 stan przed uchwyceniem Rys. 5.6. Sposoby przemieszczania końcówek chwytnych (szczęk) c
Image 124 127 5.7. Układy wykonawcze chwytaków Elementami wykonawczymi chwytaka są końcówki chwytne
Image 125 128 Rys. 5.13. Końcówki chwytne chwytaków [6,26]. a - sztywne, b - sprężyste, c - elastycz
Image 126 129 5.8. Końcówki chwytne chwytaków (szczęki) Szczęki chwytaka spełniają następujące funkc
87285 P1080301 Budowa chwytaka: I/-siczęki 2- klinowy łącznik końcówki doczyska 13 _ prowadnice tocz
więcej podobnych podstron