CCF20101004�005
18 1. Wprowadzenie
sposób błędy noszą nazwę błędów lub niepewności przypadkowych
i są nierozerwalnie związane z samym zjawiskiem pomiaru.
Inaczej mówiąc: błędami przypadkowymi będziemy nazywali niepewności pomiarowe, które, jeżeli pomiar wykonujemy wielokrotnie, ujawniają się w postaci rozrzutu wyników.
Jeśli występują jedynie błędy przypadkowe, zaś błędy systematyczne można pominąć, ocenę błędu pomiaru wykonujemy metodami statystycznymi.
2) Wędy systematyczne
Każdy przyrząd pomiarowy mierzy ze skończoną dokładnością. Doklad-: ność pomiaru, wykonanego danym przyrządem, nie może być większa niż ■ dokładność samego przyrządu pomiarowego (o dokładności przyrządu patrz rozdział 2.1). Na przykład jeżeli śruba mikrometryczna ma dokładność 0.01 mm, to wynik każdego pomiaru wykonanego przy użyciu tej śruby będzie miał dokładność 0.01 mm. Jeżeli więc tą śrubą zmierzymy średnicę drutu d i otrzymamy d — 1.25 mm, to dokładność pomiaru oczywiście będzie 0.01 mm, co zapiszemy (1.25 ± 0.01) mm. Błąd ten będzie występował systematycznie we wszystkich pomiarach wykonanych tą śrubą. W tym przypadku mamy do czynienia z błędem spowodowanym dokładnością przyrządu.
Inny rodzaj błędu, który może wystąpić we wszystkich pomiarach, jest 1 związany z wyborem metody pomiaru. Na przykład wyznaczając ciepło wła-’ ściwe metodą ostygania musimy uwzględnić fakt, że metoda ta daje poprawne wyniki, gdy badane ciało jest dobrym przewodnikiem ciepła. Jeżeli warunek ten nie jest spełniony, otrzymany wynik będzie obarczony błędem. Dla złych przewodników ciepła musimy stosować inne metody pomiaru.
Kolejnym źródłem błędu występującego we wszystkich pomiarach, może j być stosowanie niewłaściwego dla danego pomiaru przyrządu pomiarowego. * Aby to wyjaśnić przeanalizujmy następujący przykład:
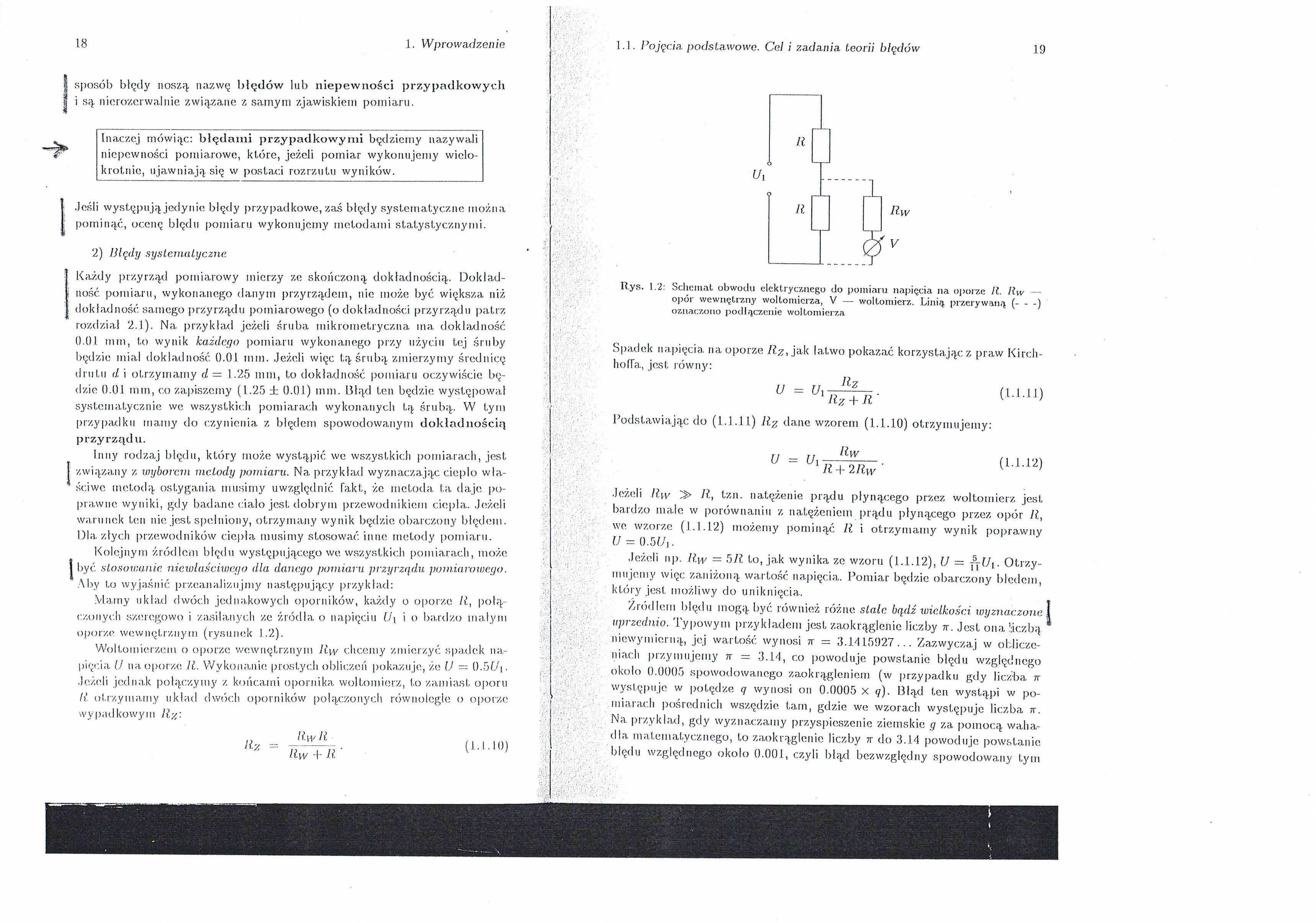
.Vlamy układ dwóch jednakowych oporników, każdy o oporze II, połączonych szeregowo i zasilanych ze źródła o napięciu U\ i o bardzo małym oporze wewnętrznym (rysunek 1.2).
Woltomierzem o oporze wewnętrznym Ii w chcemy zmierzyć spadek napięcia U na oporze Ii. Wykonanie prostych obliczeń pokazuje, że U = 0.5(7). Jeżeli jednak połączymy /. końcami opornika woltomierz, to zamiast oporu /,' otrzymamy układ dwóch oporników połączonych równoległe o oporze wypadkowym lly.
Iły.
Iłwli liw + ii '
1.1. Pojęcia, podstawowe. Cel i zadania teorii błędów
19
Ui
Rw
V
Rys. 1.2: Schemat obwodu elektrycznego do pomiaru napięcia na oporze II. Rw —
opór wewnętrzny woltomierza, V — woltomierz. Linią przerywaną (---)
oznaczono podłączenie woltomierza
Spadek napięcia na oporze Rz, jak łatwo pokazać korzystając z praw Kirch-hoffa, jest równy:
Podstawiając do (1.1.11) R.z dane wzorem (1.1.10) otrzymujemy:
Ui
Rw
R+2RW'
(1-1-12)
Jeżeli R\v R, tzn. natężenie prądu płynącego przez woltomierz jest bardzo małe w porównaniu z natężeniem prądu płynącego przez opór R, we wzorze (1.1.12) możemy pominąć R i otrzymamy wynik poprawmy U = 0.5U,.
Jeżeli np. Rjy = 5R to, jak wynika ze wzoru (1.1.12), U = frUi• Otrzymujemy więc zaniżoną wartość napięcia. Pomiar będzie obarczony bledem, który jest możliwy do uniknięcia.
Źródłem błędu mogą być również różne stale bądź wielkości wyznaczone uprzednio. Typowym przykładem jest zaokrąglenie liczby ir. Jest ona liczbą niewymierną, jej wartość wynosi 7r = 3.1415927... Zazwyczaj w obliczeniach przymujemy ir — 3.14, co powoduje powstanie błędu względnego około 0.0905 spowodowanego zaokrągleniem (w przypadku gdy liczba rr występuje w potędze q wynosi on 0.0005 X </). I3łąd ten wystąpi w pomiarach pośrednich wszędzie tam, gdzie we wzoracli występuje liczba 7r. Na przykład, gdy wyznaczamy przyspieszenie ziemskie g za pomocą wahadła matematycznego, to zaokrąglenie liczby ?r do 3.14 powoduje powstanie błędu względnego około 0.001, czyli błąd bezwzględny spowodowany tym
Wyszukiwarka
Podobne podstrony:
CCF20101004�005 18 1. Wprowadzenie sposób błędy noszą nazwę błędów lub niepewności przypadkowych i s
CCF20110529�020 18 Wprowadzenie litery u, U AUle Kto ma te ule? Tata ma te ule. A my
CCF20110308�008 16 Wprowadzenie możliwie oslry, rozłączny, jednoznaczny i użyteczny. Elementami tego
CCF20110124�067 ł 18. SYSTEM ECD1S ORAZ ELECTRON 1CZNE MAPY NAWIGACYJNE 899.Jaką nazwę noszą systemy
18 Wprowadzenie w problematykę przedstawienia go retoryka wzniosłości jest nie tylko sposobem na rad
IMG$18 Kawnwua le noszą nazwę pierwszego równaniu termodynamiki. Zakładając, że energia wewnętrzna c
CCF20101004�016 18 3. Wielkości charakteryzujące serię pomiarów... Korzystając z „reguły przenoszen
CCF20101206�041 Profile zbieraczy Na początku wyznacza się zbieracze główne, które w każdym dziale n
CCF20110124�064 18. SYSTEM ECDIS ORAZ ELECTRONICZNE MAPY NAWIGACYJNE 855. Jaką oficjalną nazwę otrzy
CCF20110129�025 6.3. Spektrofluorymetria6.3.1. Wprowadzenie Luminescencję definiuje się w sposób ogó
CCF20101004�002 12 1. Wprowadzenie To oszacowanie jest celem teorii błędów, tzn. jest nim podanie ni
18 Wprowadzenie spójną całość. Książka zawiera różne sposoby interpretacji kłamstwa, czyli różne
wyników pomiarowych. Te przybliżone wartości błędów noszą nazwę wskaźników dokładności
CCF20101004�002 12 1. Wprowadzenie To oszacowanie jest celem teorii błędów, tzn. jest nim podanie ni
więcej podobnych podstron