357 Blender kompedium
712
Btender. Kompendium

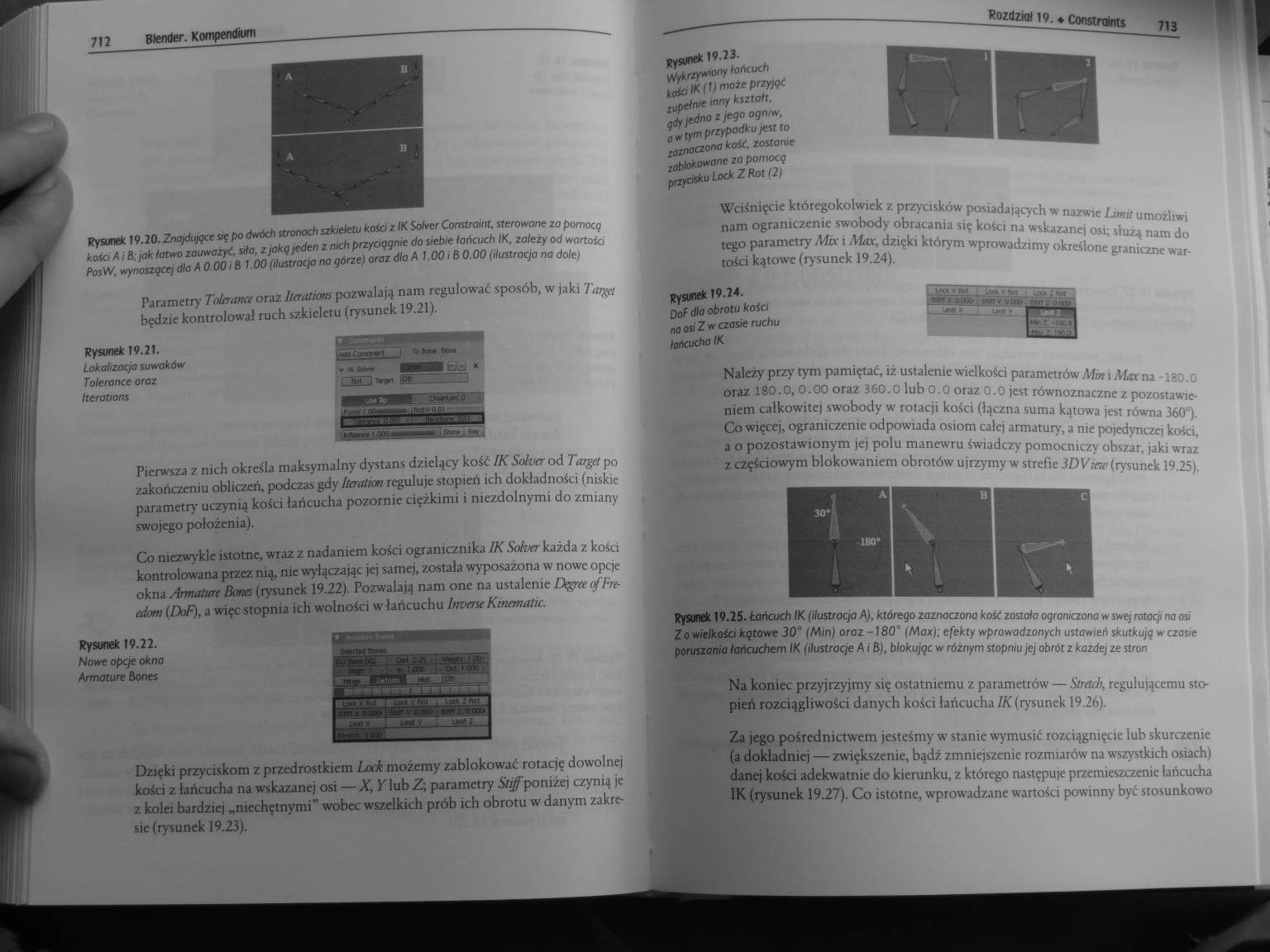
Rysunek 19.20. Znajdujące się po dwóch stronach szkieletu koso z IK Sohrer Constraint, sterowane za pomocą kosa A i B; jak łatwo zauważyć, sita, z jaką jeden z nich przyciągnie do siebie łańcuch IK, zalezy od wartoSci PosW, wynoszącej dla A 0.00 i B ! 00 (ilustracja na górze! oraz dloA 1,001B 0.00 (ilustracja na dole)
Parametry Tulemnce oraz Iłeralions pozwalają nam regulować sposób, w jaki Target będzie kontrolował ruch szkieletu (rysunek 19.21).
Rysunek 19.21.
Lokalizacjo suwaków Tolerance oraz Iterations


Pierwsza z nich określa maksymalny dystans dzielący kość IKSofoer od Target po zakończeniu obliczeń, podczas gdy Iteratim reguluje stopień ich dokładności (niskie parametry uczynią kości łańcucha pozornie ciężkimi i niezdolnymi do zmiany swojego położenia).
Co niezwykle istotne, wraz z nadaniem kości ogranicznika IKSolwr każda z kości kontrolowana przez mą, nie wyłączając jej samej, została wyposażona w nowe opcje okna Armaturę Brna (rysunek 19.22). Pozwalają nam one na ustalenie Dtgree offre-edom (DoF), a więc stopnia ich wolności w łańcuchu IrwerseKinematic.
Rysunek 19.22.
Nowe opcje okna Armaturę Bones
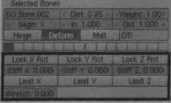
Dzięki przyciskom z przedrostkiem Lock możemy zablokować rotację dowolnej kości z łańcucha na wskazanej osi — X, Y lub Z; parametry Stiffponiżej czynią je
z kolei bardziej „niechętnymi” wobec wszelkich prób ich obrotu wdanym zakresie (rysunek 19.23).
Rozdział 19. ♦ Constraints
713

Rysunek 19.23.
Wykrzywiony łańcuch kniei IK (I) może przyjęć zupełnie inny kształt, gdy jedno z jego ogniw, o w tym przypadku jest to zaznaczono koić. zostanie zablokowane za pomocg przycisku Lock Z Rot (2)
Wciśnięcie któregokolwiek z przycisków posiadających w nazwie Lnnil umożliwi nam ograniczenie swobody obracania się kości na wskazanej osi; śluzą nam do tego parametry zWżv i Metx. dzięki którym wprowadzimy określone graniczne wartości kątowe (rysunek 19.24).
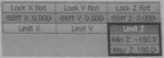
Rysunek 19.24.
DoF dla obrotu koić no osi Z w czasie ruchu lońcucha IK
Należy przy tym pamiętać, iż ustalenie wielkości parametrów Mm i .Vkr na : s: oraz 180.0,0.00 oraz 360.0 lub 0.0 oraz 0.0 jest równoznaczne z pozostawieniem całkowitej swobody w rotacji kości (łączna suma kątowa jest równa 360’). Co więcej, ograniczenie odpowiada osiom całe] armatury, a nie pojedynczej kości, a o pozostawionym jej polu manewru świadczy pomocniczy obszar, jaki wraz z częściowym blokowaniem obrotów ujrzymy w strefie 3DViar (rysunek 19.25)

Rysunek 19.25. Łańcuch IK (ilustracja A), którego zaznaczono koić zostało ograniczona w swej rotacji na osi Z o wielkości kętowe 30° (Min) oraz -180° (Maxj; efekty wprowadzonych ustawień skutkuję w czasie po ruszania łańcuchem IK (ilustracje A i B), b/okujęc w różnym stopniu jej obrót z każdej ze stron
Na koniec przyjrzyjmy się ostatniemu z parametrów — Strctcb, regulującemu stopień rozciągliwości danych kości łańcucha IK (rysunek 19.26).
Za jego pośrednictwem jesteśmy w stanie wymusić rozciągnięcie lub skurczenie (a dokładniej — zwiększenie, bądź zmniejszenie rozmiarów na wszystkich osiach) danej kości adekwatnie do kierunku, z którego następuje przemieszczenie łańcucha IK (rysunek 19.27). Co istotne, wprowadzane wartości powinny być stosunkowo
Wyszukiwarka
Podobne podstrony:
360 Blender kompedium 718 Blender. Kompendium Rysunek 19.36. Poruszający się obiekt Target — Cube, k
277 Blender kompedium 552 Blender. Kompendium Rysunek 14.20. Zmiona wielkości Size z 0.200 {ilustrac
358 Blender kompedium 7M Blender. Kompendium Rysunek 19.26. Opcja Stretch Rysunek 19.27. Dwuczęściow
362 Blender kompedium 722 Blender. Kompendium Rysunek 19.47. Przechowująca ogranicznik Copy Location
363 Blender kompedium 724 Blenćer. Kompendium Rysunek 19.49. Podążaj za znakami, a na pewno nie
365 Blender kompedium 728 Blender. Kompendiom Rysunek 19.54. Kata Una2i Hok2, ich ustawienia oraz&nb
401 Blender kompedium 800 Blend er. Kompendium Rysunek 23.6. Okno Multires tuz po
405 Blender kompedium 808Blender. Kompendium poniżej koleme etapy rzeźbienia twarzy (rysunek 23.24),
297 Blender kompedium 592Bfender. Kompendium Blender umożliwia rum uczynienie jci granic lepkimi (No
425 Blender kompedium 848Biender. Kompendium Cydic. 337 Cył Radius. 393 Cylinder, 30.45 Cy
356 Blender kompedium 7)0 Btender. Kompendiom 7)0 Btender. Kompe
Image6 (20) Skrzynka porad Skrzynka porad 19, 20 i masa 17 przenoszą w dwóch kierunkach zespolony&nb
Rysunek 19 Ustawianie ram czasowych. Po zadaniu wszystkich parametrów można przejść do analizowania
391 Blender kompedium Rozdział 22 SekwencjeWprowadzenie Apetyt rośnie w miarę jedzenia — po przygoto
więcej podobnych podstron