356 Blender kompedium
7)0 Btender. Kompendiom
7)0 Btender. Kompendiom
AM IK Conmlnt
To E«*ptv Otytcl Wtthout Targ® I
Rysunek 19.14.
Menu Add IK. Constromt
Kość zawierająca IK Sok/er jest zarazem ostatnim ogniwem łańcucha, którym będzie poruszać. Ponieważ nieustanne zaznaczanie jej i odpowiednie przemieszczanie celem uzyskania interesujących nas póz może być niewygodne (opcja Uf'// bont Targa), istmeic możliwość przypisania jc| swojego rodzaju dźwigni (tzw. nul!). Może być nią obiekt Empty (opcja To New Empty Objął) bądź jakakolwiek inna kość, niebędąca powiązana z nim relaqami rodzinnymi. Działanie takie zapewnia nam nic tylko większą swobodę manewru szkieletem, ale i dzięki systemowi warstw jego dużo większą przejrzystość (rysunek 19.15).
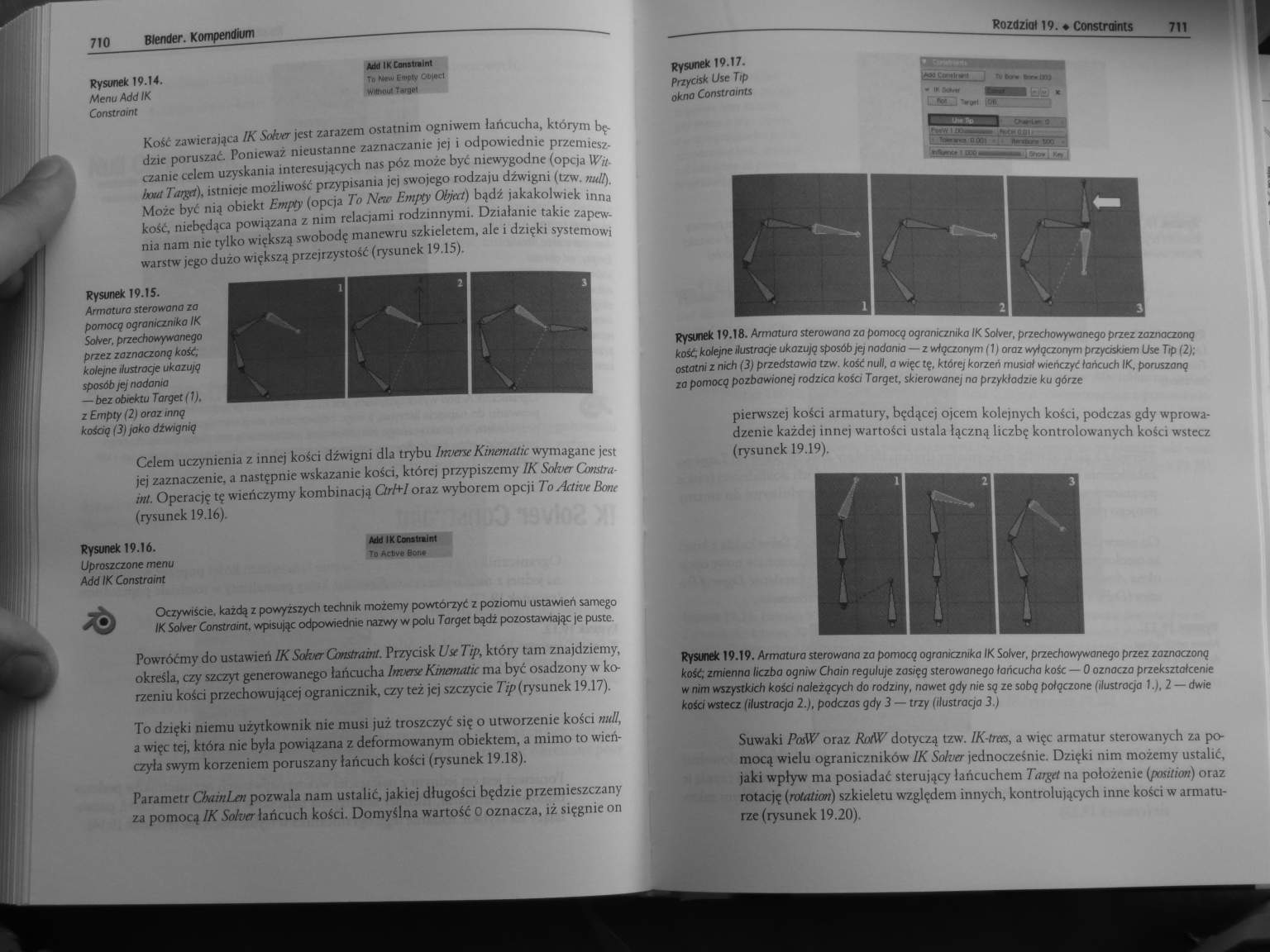
Rysunek T9.I5.
Armotura sterowana za pomocą ogranicznika IK Sohrer. przechowywanego przez zaznaczoną kosi, kolejne ilustracje ukazują sposób jej nadania — bez obiektu Target (1), z Empty (2) oraz mną kością (3) jako dźwignią
Celem uczynienia z innej kości dźwigni dla trybu Irmtrse Kinematic wymagane jest jej zaznaczenie, a następnie wskazanie kości, której przypiszemy IK Solna Gmstrn-int. Operację tę wieńczymy kombinacją OrMoraz wyborem opcji ToActhc Bonę (rysunek 19.16).
UU lkCon»li»in<
To Actwe Bor.e
Rysunek 19.16.
Uproszczone menu
Add IK Constraint

Oczywiście, każdą z powyższych technik możemy powtórzyć z poziomu ustawień samego IK Soher Constraint. wpisując odpowiednie nazwy w polu Target bądź pozostawiając |e puste.
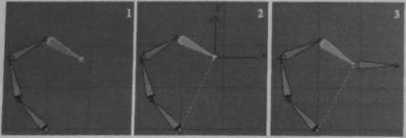
Powróćmy do ustawień IKSokrer Constraint. Przycisk UseTip, który tam znajdziemy, określa, czy szczyt generowanego łańcucha Irwerte Kinematic ma być osadzony w korzeniu kości przechowującej ogranicznik, czy też jej szczycie 7//>(rysunek 19.17).
To dzięki niemu użytkownik nie musi już troszczyć się o utworzenie kości nuli, a więc tej, która nic była powiązana z deformowanym obiektem, a mimo to wieńczyła swym korzeniem poruszany łańcuch kości (rysunek 19.18).
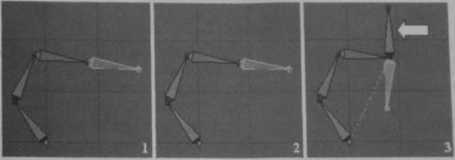
Parametr CbainLm pozwala nam ustalić, jakiej długości będzie przemieszczany za pomocą IK Sobą łańcuch kości. Domyślna wartość 0 oznacza, iż sięgnie on
Rozdział 19. • Constraims
711
Rysunek 19.17.

Przycisk Use Tip okno Constraints
Rysunek 19.18. Armatura sterowana za pomocą ogranicznika IK 5ohrer, przechowywanego przez zaznaczono kość kolejne /lustracje ukazuję sposób jej nadania — z włączonym (1/ oraz wytoczonym przyciskiem Use Tip (2); ostatni z nich (3) przedstawia tzw. kość nuli, a więc tę, której korzeń musiał wieńczyć łańcuch IK, poruszono za pomocg pozbawionej rodzica koić Target, skierowanej na przykładzie ku górze
pierwszej kości armatury, będącej ojcem kolejnych kości, podczas gdy wprowadzenie każdej innej wartości ustala łączną liczbę kontrolowanych kości wstecz (rysunek 19.19).
Rysunek 19.19. Armatura sterowano za pomocę ogranicznika IK Solver. przechowywanego przez zaznaczoną kość; zmienna liczba ogniw Chain reguluje zasięg sterowanego łańcucha kość — 0 oznacza przekształcenie w nim wszystkich kości należących do rodziny, nawet gdy nie sg ze sobą połączone (ilustracja 1.1, 2 — dwie kości wstecz (ilustracja 2.), podczas gdy 3 — trzy (ilustracja 3.)
Suwaki PasW oraz Rtffl' dotyczą tzw. IK-tnrs, a więc armatur sterowanych za pomocą wielu ograniczników IK Soher jednocześnie. Dzięki nim możemy ustalić, jaki wpływ ma posiadać stcruiący łańcuchem Target na położenie {ptmtan) oraz rotację (rotaticm) szkieletu względem innych, kontrolujących inne kości w armaturze (rysunek 19.20).
Wyszukiwarka
Podobne podstrony:
297 Blender kompedium 592Bfender. Kompendium Blender umożliwia rum uczynienie jci granic lepkimi (No
425 Blender kompedium 848Biender. Kompendium Cydic. 337 Cył Radius. 393 Cylinder, 30.45 Cy
357 Blender kompedium 712Btender. Kompendium Rysunek 19.20. Znajdujące się po dwóch stronach szkiele
405 Blender kompedium 808Blender. Kompendium poniżej koleme etapy rzeźbienia twarzy (rysunek 23.24),
281 Blender kompedium 560 Btender. Kompendium Rysunek 14.44. Oświetlona wyłącznie techniką AO oraz&n
287 Blender kompedium 572 Btender. Kompendium Parametr NormaI nadaje cząsteczkom początkową prędkość
288 Blender kompedium 574 Btender. Kompendium Kolejne p.ir.unctry X, Yom Z. umiesz
291 Blender kompedium 580 Btender. Kompendium Pierwsza z nicii, domyślnie wleczona przyciskiem Use G
294 Blender kompedium 586 Btender. Kompendium ♦ Fluid — czyni z aktywnej bryły cie
319 Blender kompedium 636 Btender. Kompendium Skasowanie okreśionei trnwi bądź kla
424 Blender kompedium 846 Btender. Kompendium Bevcl Depth, 75 BevOb. 155, J56 Beztcr. 30, 73 Be
432 Blender kompedium 862 Btender. Kompendium 862 Btender. Kompendium Radiosity Emit, 535 etapy
338 Blender kompedium 674 Btender. Kompendium interesujących nas animacji. Cały proces powinien jesz
347 Blender kompedium 692 Btender. Kompendium sposoby ukazania modelu w strefie )D Virw, takie jak W
348 Blender kompedium 694 Btender. Kompendium nazwę zaznaczonej podczas malowania kości, jej porusze
351 Blender kompedium 700 Btender. Kompendiom Poza opisanymi już funkcjami, które się w niej kryją,
390 Blender kompedium 778 Btender. Kompendiom 778 Btender. Kompendiom art^Nfy. ( Cpwr wina Mu
392 Blender kompedium 782 Btender. Kompendium Rysunek 22.1. Strefa Video Sequence Editor. dostępna z
245 Blender kompedium 488 Btender. Kompendium Blendcr pozwala na dowolne przemiesz
więcej podobnych podstron