DSCN0504 (Large)
9,7. MODEL MATEMATYCZNY SILNIKA 327
zaniedbuje się najczęściej opóźnienia typu elektromagnetycznego (wprowadzane przez uzwojenie sterowania) jako niewspółmiernie małe w porównaniu z opóźnieniami typu bezwładnościowego, i zakłada się, że prąd w uzwojeniach narasta skokowo. Identycznie postępuje się w przypadku, gdy silnik jest zasilany ze źródła prądowego nic zaś napięciowego. Model matematyczny sprowadza się wtedy do jednego równania równowagi momentów, a wnioski wynikające z analizy tak uproszczonego modelu są najczęściej wystarczające dla użytkowników silników. Modele takie nie wystarczają jednakże konstruktorom i projektantom. W pracach [43], [68] i [178] podano dokładniejsze modele matematyczne silników skokowych różnych odmian konstrukcyjnych. Mogą być one podstawą do numerycznej analogowej analizy pracy silników. Najczęściej modele matematyczne przedstawi w jednostkach względnych. Wówczas wyniki analizy tych modeli mają chart ogólny i są słuszne w odniesieniu do określonej klasy silników. Jak stwierd w p. 9.5, silniki skokowe hybrydowe dwupakietowe o rozdzielonym uzwój* dwupasmowym mają najkorzystniejsze właściwości i ich zastosowania obejn największą liczbę urządzeń. Dlatego też - jako przykład - zostanie przedstawiony proces tworzenia modelu matematycznego takiego silnika. Model matematyczny będzie wyprowadzony przy założeniu, że silnik jest układem liniowym. Nie zostaną więc uwzględnione: nasycenie magnetyczne, histereza i prądy wirowe w magnetowodzie. Przyjmuje się ponadto, że uzwojenia stojana wytwarzają pole sinusoidalne i że oba pasma są identyczne. Silnik jest zasilany impulsami przemienno-biegunowymi ze źródła napięciowego, wg cyklogramu (I, 2), (2, -1), (-1, -2), (-2,1),... przez rezystor forsujący o rezystancji R+ Na rysunku 9.26 przedsta-
9,7. MODEL MATEMATYCZNY SILNIKA 327


m
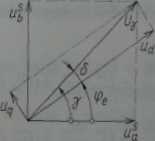
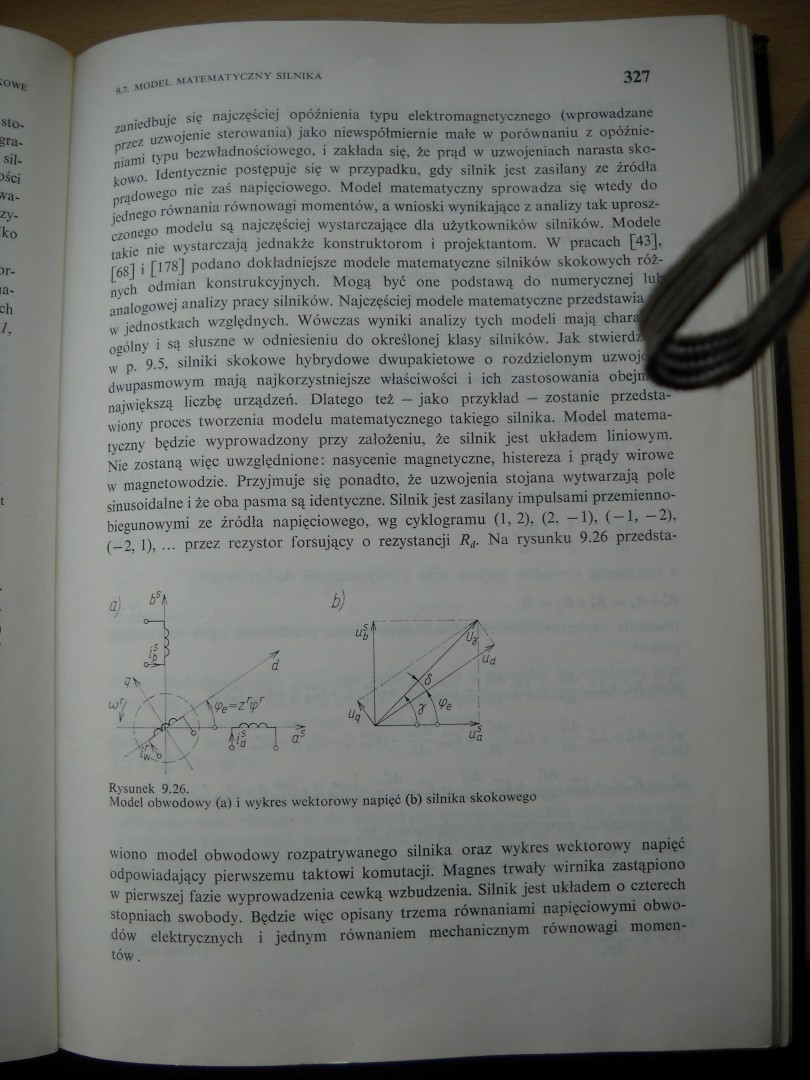
Rysunek 9.26.
Model obwodowy (a) i wykres wektorowy napięć (b) silnika skokowego
wiono model obwodowy rozpatrywanego silnika oraz wykres wektorowy napięć odpowiadający pierwszemu taktowi komutacji. Magnes trwały wirnika zastąpiono w pierwszej fazie wyprowadzenia cewką wzbudzenia. Silnik jest układem o czterech stopniach swobody. Będzie więc opisany trzema równaniami napięciowymi obwodów elektrycznych i jednym równaniem mechanicznym równowagi momen-
Wyszukiwarka
Podobne podstrony:
DSCN0506 (Large) 9.7. MODEL MATEMATYCZNY SILNIKA 329 Układ równań (9.42) można wykorzystać do dalsze
Slajd11 8 Wprowadzenie do badań operacyjnych - składowe MD Na model matematyczny sytuacji decyzyjnej
Lab. ISS2. Model matematyczny silnika prądu stałego Model silnika - zależność między napięciem
Gabriel KOST, Andrzej NIERYCHLOK (1) > model matematyczny silnika elektrycznego opisujący część
15 2.6. Model matematyczny silnika BLDC z przekształtnikiem - opis w dziedzinie operatorowej Rysunek
DSCN0524 (Large) 406 13. SILNIKI PRAŁ)U STAŁEGO napięcie wyjściowe hallotronu jest porporcjonalne do
DSCN0525 (Large) 407 12.4. SILNIKI O KOMUTACJI BEZ7ESTYKOWEJ f Wda? ZJI or*a Rysunek 12.12. Silnik o
DSCN0526 (Large) 408 12. SILNIKI PRA»U STAŁEGO czego rozruch silnika jest zapewniony przy dowolnym p
manifestuje się najczęściej w reakcjach typu: To nic takiego, ja to dopiero musiałem przeżyć
DSCN0519 (Large) SILNIKI WYKONAWCZE PKĄDU STAŁEGO 277 Moc sterowania wyraża się zależnością SILNIKI
Rozdział 3 (Model samouczącego się mechanizmu dostępu do sieci) omawia model matematyczny samouczące
RADIO SAMOCHODOWE MODEL AD 182 H - radio wyłącza się automatycznie przy wyłączeniu silnika. Jeżeli
IMAG0596 (3) Opis matematyczny danych Model matematyczny gu badanego obiektu fizycznego da się
IMAG0597 (4) Opis matematyczny danych f Model matematyczny gm badanego obiektu fizycznego da się prz
więcej podobnych podstron