DSCN0519 (Large)
SILNIKI WYKONAWCZE PKĄDU STAŁEGO 277
Moc sterowania wyraża się zależnością
SILNIKI WYKONAWCZE PKĄDU STAŁEGO 277
t*
“—w~

Rr+ka kM
(8.237)
Jeżeli za jednostkę odniesienia przyjmuje się moc w stanie zwarcia przy napięciu znamionowym (v *= O, a = 1), czyli moc
W*
Rr
(8.238)
to moc sterowania w jednostkach względnych wyrazi się związkiem
(8.239)
_y\
\D-RT + kvkM )
Zależność Ptr = f (v) przy a = const i D9 *= 0 przedstawiono na rys. 8.66.
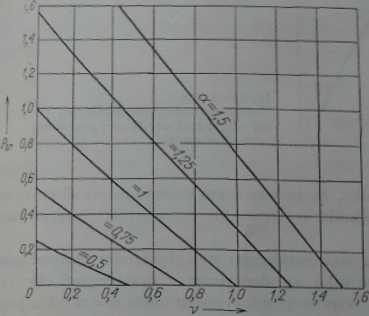
Rysunek 8.66.
Zależność mocy sterowania od względnej prędkości obrotowej przy a * const
(8.240)
(8.241)
Moc na wale (mechaniczna) silnika jest określona zależnością
p2 i;
Podstawiając zależności (8.237) i (8.234) do (8.240), otrzymuje się
p,. J.UJ?y . -kuśk-V (a- kuk*_v|
nr D,R'+k0kM V D,R'+k0ku ) a w jednostkach względnych, przy jednostce odniesienia wg (8.238)
/> m ku kg
(8.242)
Wyszukiwarka
Podobne podstrony:
DSCN0515 (Large) U, SILNIKI WYKONAWCZE PRĄDU STAŁEGO 273 ponadto pełna moc sterowania jest potrzebna
DSCN0513 (Large) SILNIKI WYKONAWCZB PRĄDU STAŁEGO 271 cUl 31b) - / 2
DSCN0517 (Large) u SILNIKI WYKONAWCZA 1’RADU ST A I-EGO 275 Uwzględniając zależność (8.231) w równan
DSCN0518 (Large) 8. SILNIKI WYKONAWCZE Jednostką odniesienia prądu sterowania jest prąd w stanie zwa
DSCN0523 (Large) U SILNIKI MALOINERCYJNE 405 Silniki mało inercyjne o wirnikach kubkowych są często
Moc pompy wyraża się wzorem: gdzie: P - moc, Q - wydatek objętościowy, ^ - gęstość W zależności od
DSCN0520 (Large) 278 8. SILNIKI WYKONAWCZE Maksymalna moc na walc wystąpi przy prędkości względnej v
DSCN0522 (Large) gj. SILNIKI WYKONAWCZE PRĄDU STAŁEGO 289 Rysunek 8.79. Ideowy schemat połączeń siln
DSCN0512 (Large) 270 8. SILNIKI WYKONAtCa W celu poprawy właściwości dynamicznych silników wykonawcz
DSCN0514 (Large) 272 8. SILNIKI WYKONAWCZE dem sterowania. W silnikach magnctoelcktrycznych obwodem
DSCN0516 (Large) 274 8. SILNIKI WYKONAWCZE 833.1. Sterowanie od strony tworaika Równania napięć i mo
DSCN0524 (Large) 406 13. SILNIKI PRAŁ)U STAŁEGO napięcie wyjściowe hallotronu jest porporcjonalne do
DSCN0526 (Large) 408 12. SILNIKI PRA»U STAŁEGO czego rozruch silnika jest zapewniony przy dowolnym p
DSCN0501 (Large) 324 *. SILNIKI SKOlfJ **»- duże zęby stojana /, 5 tworzą bieguny północne, a 3
DSCN0503 (Large) 326 9. SILNIKI SKOKOM bieguny o dwukrotnie większej podziałce biegunowej niż podzia
DSCN0504 (Large) 9,7. MODEL MATEMATYCZNY SILNIKA 327 zaniedbuje się najczęściej opóźnienia typu elek
DSCN0506 (Large) 9.7. MODEL MATEMATYCZNY SILNIKA 329 Układ równań (9.42) można wykorzystać do dalsze
DSCN0509 (Large) tt CHARAKTERYSTYKI MECHANICZNE 339 drgań własnych silnika. W przypadku, gdy a> »
DSCN0521 (Large) 288 8. SILNIKI W Y KONAWGH i wynosi (8.295) Na rysunku 8.78 pokazano przebiegi mocy
więcej podobnych podstron