DSCN0526 (Large)
408 12. SILNIKI PRA»U STAŁEGO
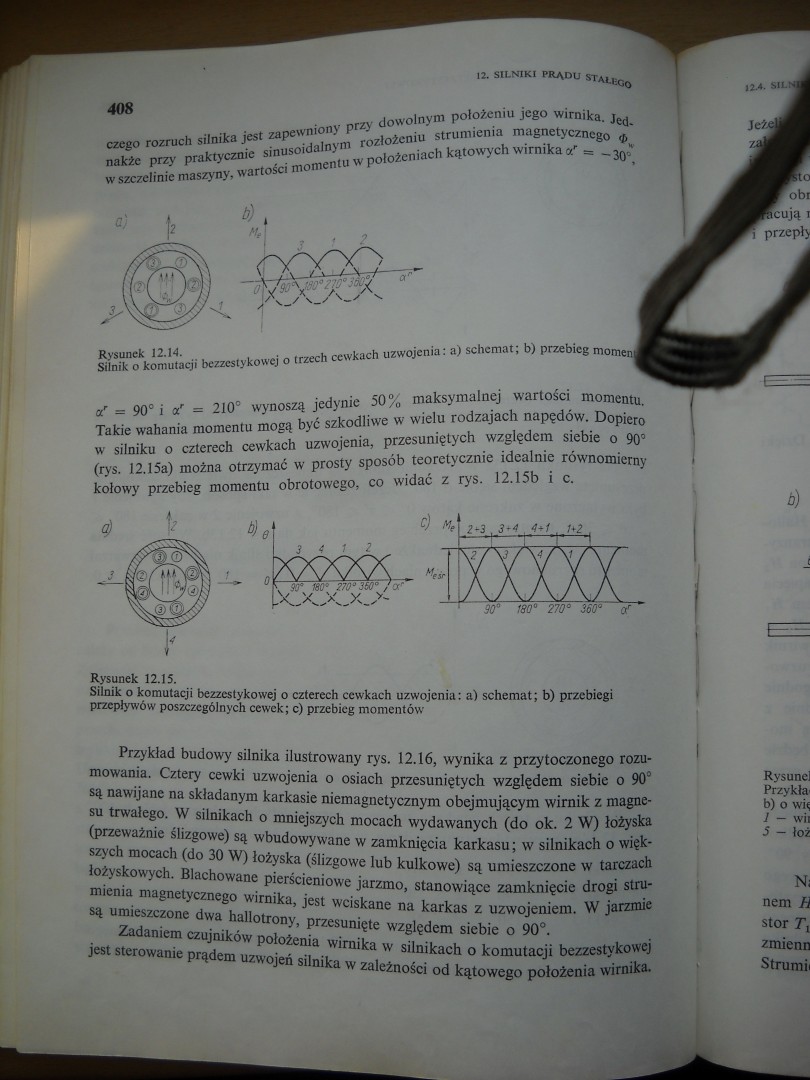
czego rozruch silnika jest zapewniony przy dowolnym położeniu jego wirnika. Jednakże przy praktycznie sinusoidalnym rozłożeniu strumienia magnetycznego w szczelinie maszyny, wartości momentu w położeniach kątowych wirnika ar = — 30°,
408 12. SILNIKI PRA»U STAŁEGO
Rysunek 12.14.
Silnik o komutacji bezzestykowej o trzech cewkach uzwojenia: a) schemat; b) przebieg mo
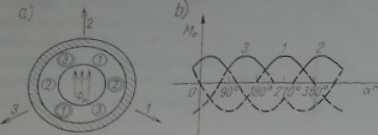
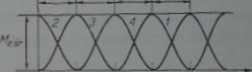
ar = 90° i = 210° wynoszą jedynie 50% maksymalnej wartości momentu. Takie wahania momentu mogą być szkodliwe w wielu rodzajach napędów. Dopiero w silniku o czterech cewkach uzwojenia, przesuniętych względem siebie o 90° (rys. 12.15a) można otrzymać w prosty sposób teoretycznie idealnie równomierny kołowy przebieg momentu obrotowego, co widać z rys. 12.15b i c.

4)
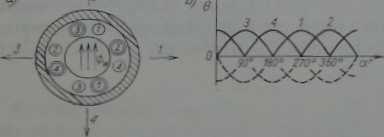
Rysunek 12.15.
Silnik o komutacji bezzestykowej o czterech cewkach uzwojenia: a) schemat; b) przebiegi przepływów poszczególnych cewek; c) przebieg momentów

2-3 . 4*/ . 7.Ż
90*m° 270° 360°
Przykład budowy silnika ilustrowany rys. 12.16, wynika z przytoczonego rozumowania. Cztery cewki uzwojenia o osiach przesuniętych względem siebie o 90° są nawijane na składanym karkasie niemagnetycznym obejmującym wirnik z magnesu trwałego. W silnikach o mniejszych mocach wydawanych (do ok. 2 W) łożyska (przeważnie ślizgowe) są wbudowywane w zamknięcia karkasu; w silnikach o większych mocach (do 30 W) łożyska (ślizgowe lub kulkowe) są umieszczone w tarczach łożyskowych. Blachowane pierścieniowe jarzmo, stanowiące zamknięcie drogi strumienia magnetycznego wirnika, jest wciskane na karkas z uzwojeniem. W jarzmie są umieszczone dwa hallotrony, przesunięte względem siebie o 90°.
Zadaniem czujników położenia wirnika w silnikach o komutacji bezzestykowej jest sterowanie prądem uzwojeń silnika w zależności od kątowego położenia wirnika.
Wyszukiwarka
Podobne podstrony:
DSCN0525 (Large) 407 12.4. SILNIKI O KOMUTACJI BEZ7ESTYKOWEJ f Wda? ZJI or*a Rysunek 12.12. Silnik o
DSCN0524 (Large) 406 13. SILNIKI PRAŁ)U STAŁEGO napięcie wyjściowe hallotronu jest porporcjonalne do
DSCN0504 (Large) 9,7. MODEL MATEMATYCZNY SILNIKA 327 zaniedbuje się najczęściej opóźnienia typu elek
DSCN0506 (Large) 9.7. MODEL MATEMATYCZNY SILNIKA 329 Układ równań (9.42) można wykorzystać do dalsze
DSCN0528 (Large) 410 12. Sil NIKI PUMHJ STAI-UOO / łta / / M n /iBaHj==consi / / / V Rysunek
laryngo stoma 12 page 005 .11. 32. Badanie otoemisji akustycznej: A. jest możliwe
DSCN0513 (Large) SILNIKI WYKONAWCZB PRĄDU STAŁEGO 271 cUl 31b) - / 2
DSCN0515 (Large) U, SILNIKI WYKONAWCZE PRĄDU STAŁEGO 273 ponadto pełna moc sterowania jest potrzebna
DSCN0519 (Large) SILNIKI WYKONAWCZE PKĄDU STAŁEGO 277 Moc sterowania wyraża się zależnością SILNIKI
DSCN0522 (Large) gj. SILNIKI WYKONAWCZE PRĄDU STAŁEGO 289 Rysunek 8.79. Ideowy schemat połączeń siln
12. Silniki i prądnice prądu stałego (DC) - (3.12) Zasada działania silnika i prąd
DSCN0449 (Large) 67 12. Poddał konstrukcyjny silników krokowychftp. 5.3. Zasada działania silnika z
DSCN0501 (Large) 324 *. SILNIKI SKOlfJ **»- duże zęby stojana /, 5 tworzą bieguny północne, a 3
DSCN0503 (Large) 326 9. SILNIKI SKOKOM bieguny o dwukrotnie większej podziałce biegunowej niż podzia
DSCN0509 (Large) tt CHARAKTERYSTYKI MECHANICZNE 339 drgań własnych silnika. W przypadku, gdy a> »
DSCN0512 (Large) 270 8. SILNIKI WYKONAtCa W celu poprawy właściwości dynamicznych silników wykonawcz
DSCN0514 (Large) 272 8. SILNIKI WYKONAWCZE dem sterowania. W silnikach magnctoelcktrycznych obwodem
DSCN0516 (Large) 274 8. SILNIKI WYKONAWCZE 833.1. Sterowanie od strony tworaika Równania napięć i mo
DSCN0517 (Large) u SILNIKI WYKONAWCZA 1’RADU ST A I-EGO 275 Uwzględniając zależność (8.231) w równan
więcej podobnych podstron