DSCN0528 (Large)
410
12. Sil NIKI PUMHJ STAI-UOO
/

łta
/
/
M'n /iBaHj==consi

/
/
/
V
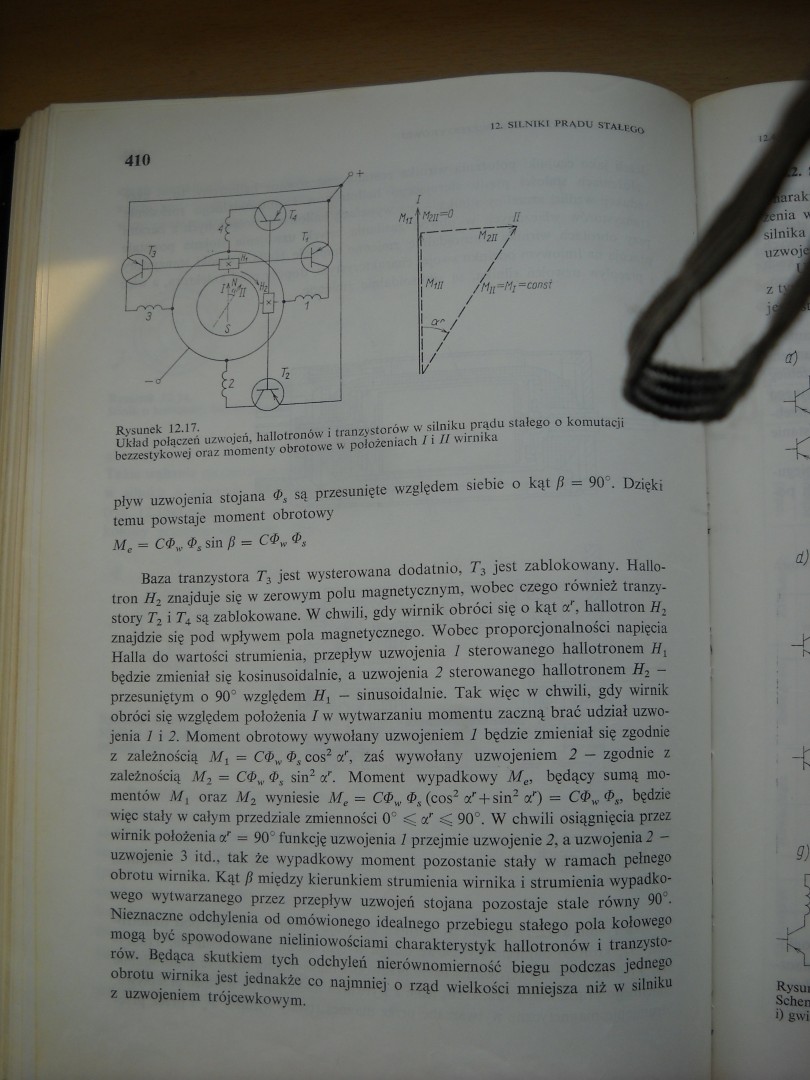
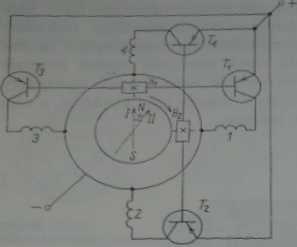
Rysunek 12.17.1--------------- —
Układ połączeń uzwojeń, hallotronów i tranzystorów w silniku prądu stałego o komutacji bezzestykowej oraz momenty obrotowe w położeniach I i II wirnika
pływ uzwojenia stojana <PS są przesunięte względem siebie o kąt P = 90 . Dzięki temu powstaje moment obrotowy Me - C<PW <PS sin P = C<PW 4>,
Baza tranzystora T2 jest wysterowana dodatnio, T3 jest zablokowany. Hallo-tron H2 znajduje się w zerowym polu magnetycznym, wobec czego również tranzystory T% i Tą są zablokowane. W chwili, gdy wirnik obróci się o kąt or, hallotron H2 znajdzie się pod wpływem pola magnetycznego. Wobec proporcjonalności napięcia Halla do wartości strumienia, przepływ uzwojenia / sterowanego hallotronem //, będzie zmieniał się kosinusoidalnie, a uzwojenia 2 sterowanego hallotronem H2 — przesuniętym o 90° względem Hx — sinusoidalnie. Tak więc w chwili, gdy wirnik obróci się względem położenia / w wytwarzaniu momentu zaczną brać udział uzwojenia / i 2. Moment obrotowy wywołany uzwojeniem 1 będzie zmieniał się zgodnie z zależnością Mx = C<PW &s cos2 or, zaś wywołany uzwojeniem 2 — zgodnie z zależnością Af2 = C<PW 4>s sin2 ar. Moment wypadkowy będący sumą momentów A/, oraz M2 wyniesie M9 = C<PW <Pt (cos2 ar+sin2 oT) = C4>w <P„ będzie więc stały w całym przedziale zmienności 0° < ar ^ 90°. W chwili osiągnięcia przez wirnik położenia ar = 90° funkcję uzwojenia / przejmie uzwojenie 2, a uzwojenia 2 -uzwojenie 3 itd.. tak że wypadkowy moment pozostanie stały w ramach pełnego obrotu wirnika. Kąt p między kierunkiem strumienia wirnika i strumienia wypadkowego wytwarzanego przez przepływ uzwojeń stojana pozostaje stale równy 90°. Nieznaczne odchylenia od omówionego idealnego przebiegu stałego pola kołowego mogą być spowodowane nicliniowościami charakterystyk hallotronów i tranzystorów. Będąca skutkiem tych odchyleń nierównomierność biegu podczas jednego obrotu wirnika jest jednakże co najmniej o rząd wielkości mniejsza niż w silniku z uzwojeniem trójcewkowym.
Wyszukiwarka
Podobne podstrony:
DSCN0525 (Large) 407 12.4. SILNIKI O KOMUTACJI BEZ7ESTYKOWEJ f Wda? ZJI or*a Rysunek 12.12. Silnik o
DSCN0526 (Large) 408 12. SILNIKI PRA»U STAŁEGO czego rozruch silnika jest zapewniony przy dowolnym p
Zadanie Funkeję podaną w postaci numerycznej sumy y=£[<U 4,5,410,12,13.(7,15)] przedstawić w
410 (12) 410 - - 411 możn8 zapisać operatorowo osługując 3i? tylko współczynnikami, dzielenie to moż
DSCN0449 (Large) 67 12. Poddał konstrukcyjny silników krokowychftp. 5.3. Zasada działania silnika z
DSCN0500 (Large) 9A KONSTRUKCJE 323 komutacji jednocześnie po kilka pasm uzwojenia wykorzystanie mie
DSCN0501 (Large) 324 *. SILNIKI SKOlfJ **»- duże zęby stojana /, 5 tworzą bieguny północne, a 3
DSCN0502 (Large) 9>. KONSTRUKCJE 325 podmagne&owującej (cewka podmagncsowująca na wirniku wym
DSCN0503 (Large) 326 9. SILNIKI SKOKOM bieguny o dwukrotnie większej podziałce biegunowej niż podzia
DSCN0504 (Large) 9,7. MODEL MATEMATYCZNY SILNIKA 327 zaniedbuje się najczęściej opóźnienia typu elek
DSCN0505 (Large) Równania napięciowe Dla każdego układu obwodów elektrycznych obowiązuje zależność V
DSCN0506 (Large) 9.7. MODEL MATEMATYCZNY SILNIKA 329 Układ równań (9.42) można wykorzystać do dalsze
DSCN0507 (Large) Charakterystyki mechaniczne przy czym fJ *= P„+fł, - całkowity względny współczynni
DSCN0508 (Large) 338 W *• S
DSCN0509 (Large) tt CHARAKTERYSTYKI MECHANICZNE 339 drgań własnych silnika. W przypadku, gdy a> »
DSCN0510 (Large) 340 340 SI »- sn-Nna Ruch wirnika q>. (i) i osi pola y przy pracy quasi-statyczn
DSCN0511 (Large) 9.9. RODZAJE PRACY Rysunek 9.30. Wpły w momentu bezwładności obciążenia na przebieg
DSCN0512 (Large) 270 8. SILNIKI WYKONAtCa W celu poprawy właściwości dynamicznych silników wykonawcz
więcej podobnych podstron