DSCN0525 (Large)
407
12.4. SILNIKI O KOMUTACJI BEZ7ESTYKOWEJ
f Wda?
ZJI or*a
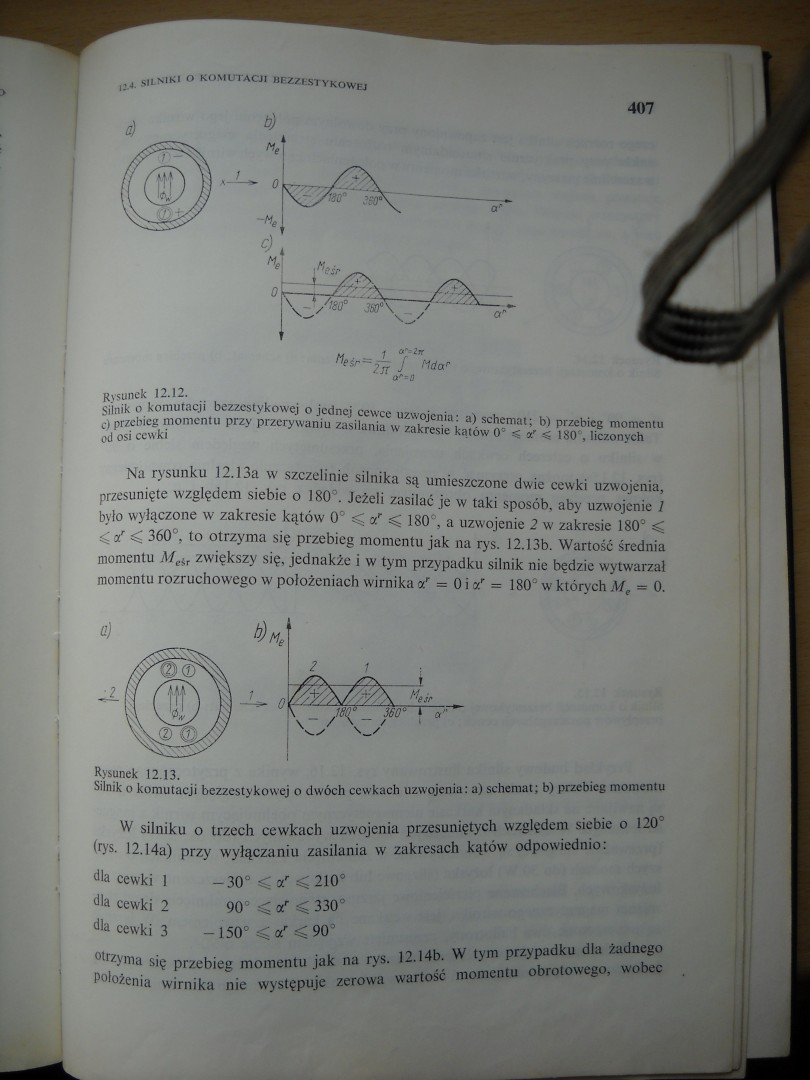
Rysunek 12.12.
Silnik o komutacji bezzcstykowcj o jednej cewce uzwojenia: a) schemat; b) przebieg momentu c) przebieg momentu przy przerywaniu zasilania w zakresie kqtów 0° ^ ar < 180", liczonych od osi cewki
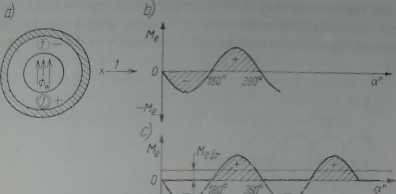
Na rysunku 12.13a w szczelinie silnika są umieszczone dwie cewki uzwojenia, przesunięte względem siebie o 180°. Jeżeli zasilać je w taki sposób, aby uzwojenie 1 było wyłączone w zakresie kątów 0° < ar < 180°, a uzwojenie 2 w zakresie 180° < </ < 360°, to otrzyma się przebieg momentu jak na rys. 12.13b. Wartość średnia momentu M^t zwiększy się, jednakże i w tym przypadku silnik nic będzie wytwarzał momentu rozruchowego w położeniach wirnika = 0 i a* = 180° w których Mt = 0.
Rysunek 12.13.
Silnik o komutacji bezzestykowej o dwóch cewkach uzwojenia: a) schemat; b) przebieg momentu
W silniku o trzech cewkach uzwojenia przesuniętych względem siebie o 120° (rys. 12.14a) przy wyłączaniu zasilania w zakresach kątów odpowiednio:
dla cewki 1 -30° < ar < 210°
dla cewki 2
90° ^ oT < 330°
dla cewki 3 -150° < oT < 90°
otrzyma się przebieg momentu jak na rys. 12.14b. W tym przypadku dla żadnego położenia wirnika nie występuje zerowa wartość momentu obrotowego, wobec
Wyszukiwarka
Podobne podstrony:
DSCN0526 (Large) 408 12. SILNIKI PRA»U STAŁEGO czego rozruch silnika jest zapewniony przy dowolnym p
DSCN0500 (Large) 9A KONSTRUKCJE 323 komutacji jednocześnie po kilka pasm uzwojenia wykorzystanie mie
DSCN0504 (Large) 9,7. MODEL MATEMATYCZNY SILNIKA 327 zaniedbuje się najczęściej opóźnienia typu elek
DSCN0506 (Large) 9.7. MODEL MATEMATYCZNY SILNIKA 329 Układ równań (9.42) można wykorzystać do dalsze
DSCN0524 (Large) 406 13. SILNIKI PRAŁ)U STAŁEGO napięcie wyjściowe hallotronu jest porporcjonalne do
DSCN0528 (Large) 410 12. Sil NIKI PUMHJ STAI-UOO / łta / / M n /iBaHj==consi / / / V Rysunek
DSCN0527 (Large) IU SILNIKI O KOMUTACJI BEZZE8TYKOWEJ 409 Jeżeli jako czujniki położenia wirnika zos
DSCN0449 (Large) 67 12. Poddał konstrukcyjny silników krokowychftp. 5.3. Zasada działania silnika z
DSCN0501 (Large) 324 *. SILNIKI SKOlfJ **»- duże zęby stojana /, 5 tworzą bieguny północne, a 3
DSCN0503 (Large) 326 9. SILNIKI SKOKOM bieguny o dwukrotnie większej podziałce biegunowej niż podzia
DSCN0509 (Large) tt CHARAKTERYSTYKI MECHANICZNE 339 drgań własnych silnika. W przypadku, gdy a> »
DSCN0512 (Large) 270 8. SILNIKI WYKONAtCa W celu poprawy właściwości dynamicznych silników wykonawcz
DSCN0513 (Large) SILNIKI WYKONAWCZB PRĄDU STAŁEGO 271 cUl 31b) - / 2
DSCN0514 (Large) 272 8. SILNIKI WYKONAWCZE dem sterowania. W silnikach magnctoelcktrycznych obwodem
DSCN0515 (Large) U, SILNIKI WYKONAWCZE PRĄDU STAŁEGO 273 ponadto pełna moc sterowania jest potrzebna
DSCN0516 (Large) 274 8. SILNIKI WYKONAWCZE 833.1. Sterowanie od strony tworaika Równania napięć i mo
DSCN0517 (Large) u SILNIKI WYKONAWCZA 1’RADU ST A I-EGO 275 Uwzględniając zależność (8.231) w równan
DSCN0518 (Large) 8. SILNIKI WYKONAWCZE Jednostką odniesienia prądu sterowania jest prąd w stanie zwa
DSCN0519 (Large) SILNIKI WYKONAWCZE PKĄDU STAŁEGO 277 Moc sterowania wyraża się zależnością SILNIKI
więcej podobnych podstron