HWScan00197
°raz współrzędnych x° 1 y°’ Przy czym wykorzystuje
równanie (D.oDj
2r j
K.xA = VA =
L sm = L
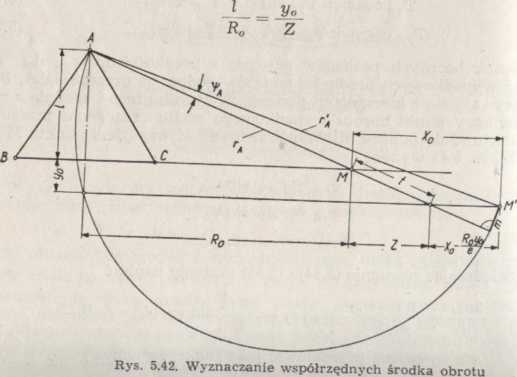
i+2/0
rA + t
2 m
, _ rAyo 1 l
cza
= Rcyt l
m_
_ Royo
l + Vo
, ta Ho
r A + ——
xQ l RqRq
~ rA
|
z*. - Ky„ k*a ~ * rA L |
(5.74) | |
|
2t k,b = v„ h = —fTsin VB = |
2 y0 L |
(5.75) |
|
2 . |
tyo |
(5.76) |
|
KxC = vc£c- L sin Wc - |
L |
skąd
Wstawiając równania (5.65), (5.66), (5.68), (5.70) do równań (5.71), (5.72), (5.73) otrzymamy
Ky (ta + Tb + rc) = (3 “ Rxa ~ K2xb ~ Kxc) (5.77)
KxA cos (p + Ky sin V = KxB + KxC (5.78)
Ky cos V + 2Ky = KxA sin cp (5.79)
Ruch urządzenia na trzech gąsienicach opisany jest zatem przez sześć równań (5.74) do (5.79) z sześcioma niewiadomymi
K-xAi KxB, R-xCt Ky, x0, y0
Bezwymiarowe współczynniki K.v, Ky określają też wartości KM oraz siły tarcia Tx, Ty i momenty M'0 Mo
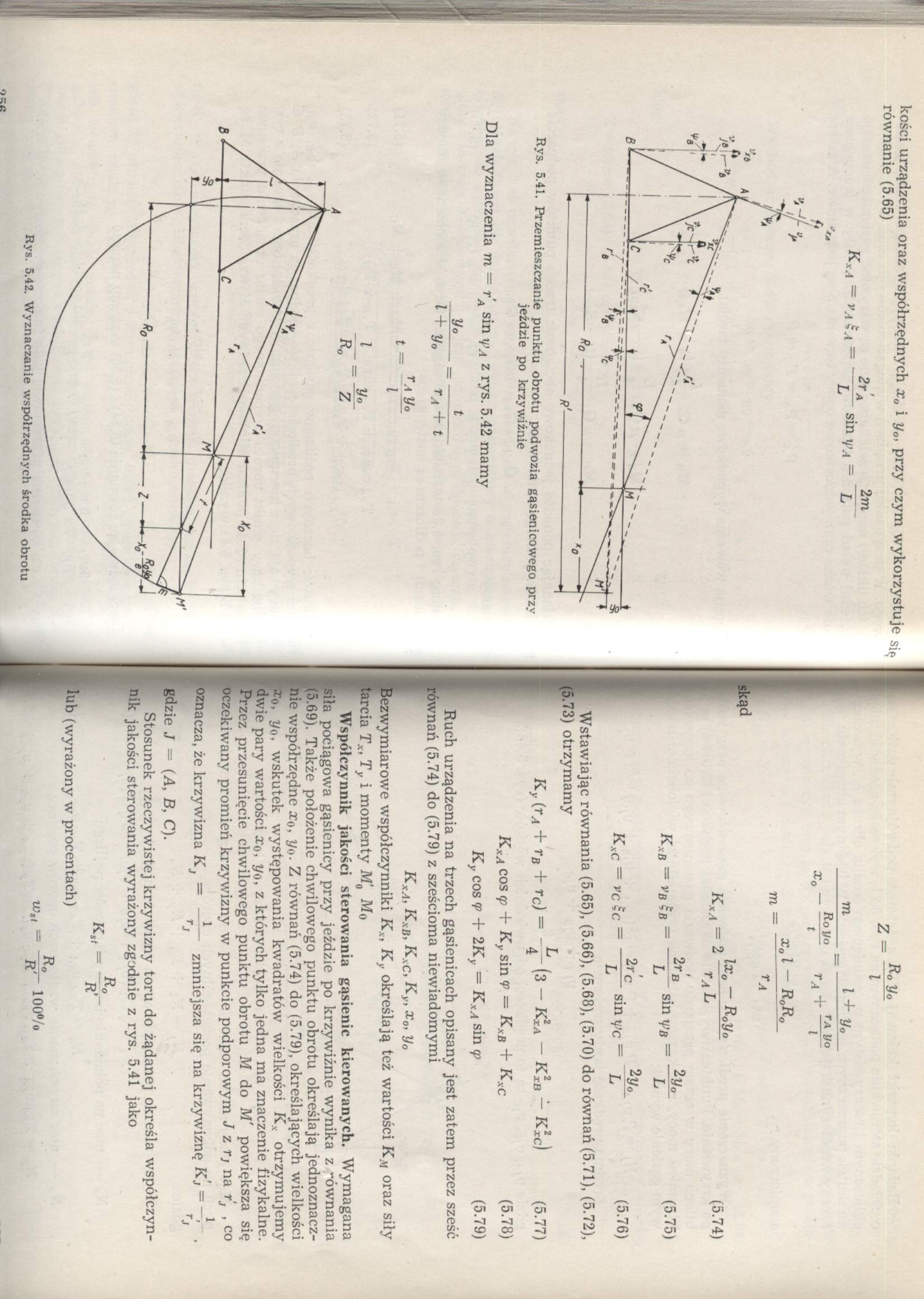
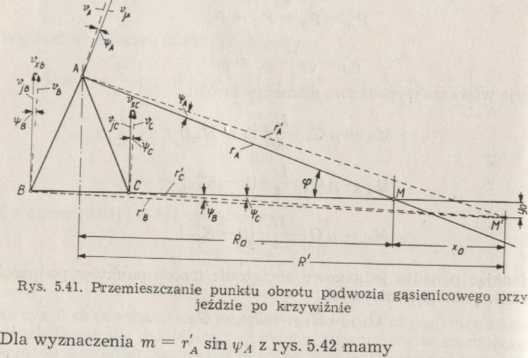
Współczynnik jakości sterowania gąsienic kierowanych. Wymagana siła pociągowa gąsienicy przy jeździe po krzywiźnie wynika z ~ównania (5.69). Także położenie chwilowego punktu obrotu określają jednoznacznie współrzędne x0, y0. Z równań (5.74) do (5.79), określających wielkości x0, y0, wskutek występowania kwadratów wielkości Kx otrzymujemy dwie pary wartości x0, yo, z których tylko jedna ma znaczenie fizykalne. Przez przesunięcie chwilowego punktu obrotu M do M' powiększa się oczekiwany promień krzywizny w punkcie podporowym J z rj na r'j , co
oznacza, że krzywizna K3 = —~~ zmniejsza się na krzywiznę Kj = ,
gdzie J = {A, B, C).
Stosunek rzeczywistej krzywizny toru do żądanej określa współczynnik jakości sterowania wyrażony zgodnie z rys. 5.41 jako lub (wyrażony w procentach)
R
wtł = -~r- 100%
Wyszukiwarka
Podobne podstrony:
dydaktyka konspekt cz8 ZAŁĄCZNIK NR 2 (Pod każdym przy kładem podana jest metoda i właściwy wynik, p
przy czym liczba równań m może być mniejsza, równa lub większa niż liczba niewiadomych n. Współczynn
Strona0053 53 albo (2.100) x-ł-a>QX = qcosa)t przy czym: &>n Ł. m (2.101) Równanie (2.100)
HWScan00252 podpartego o płaszczyznę poziomą wynoszą a = arc sin (sin a cos /?), przy czym kąt /? je
91 Dylemat więźnia jako przykład wykorzystania teorii gier z możliwych strategię. Przy czym wybrana
skanowanie0003 (11) Mieliśmy 4 fotopunkty o współrzędnych terenowj^n^SZ. Na tych punk®h pomierzyliśm
Obraz (179) - równanie momentów względem punktu A: (7.3)Nll-Qx + p{e-^ + pĄ 0 przy czym x jest współ
71393 Obraz!0 (11) Wyprawę narzuca się dwukrotnie, przy czym drugi raz dopiero po wyschnięciu pierws
AR wynika tylko z klasy opornika i jest sumą niepewności pomiarowych wykorzystywanych dekad, przy cz
możliwość korzystania z ulgi podatkowej w podatku dochod. (max. 50% przy czym ulgę można wykorzystać
mech2 181 560 ty Energia kinetyczna układu 1 .2 1 2 s = T V + T m2 V przy czym+ y2, x2 = x + ł sinty
mech2 181 560 ty Energia kinetyczna układu 1 .2 1 2 s = T V + T m2 V przy czym+ y2, x2 = x + ł sinty
161(1) Dla boku BC mamy: x = a—y (z równania prostej BC)-, i —y, > ) = u2 = 6y2—6ay 3a2, przy cz
Fiza 0 -I 9. Doskonały silnik cieplny pracuje według cyklu Carnota, przy czym y~80% ciepła poi od gr
48784 str 119 Wykorzystując wymienione wcześniej pojęcia oraz związek (14.5) można napisać, że przy
więcej podobnych podstron