82370
Część 1 10. METODA SIL RAMA 27


4
-7.348 ©
[kNJ
W?,
*-2-*-2-r
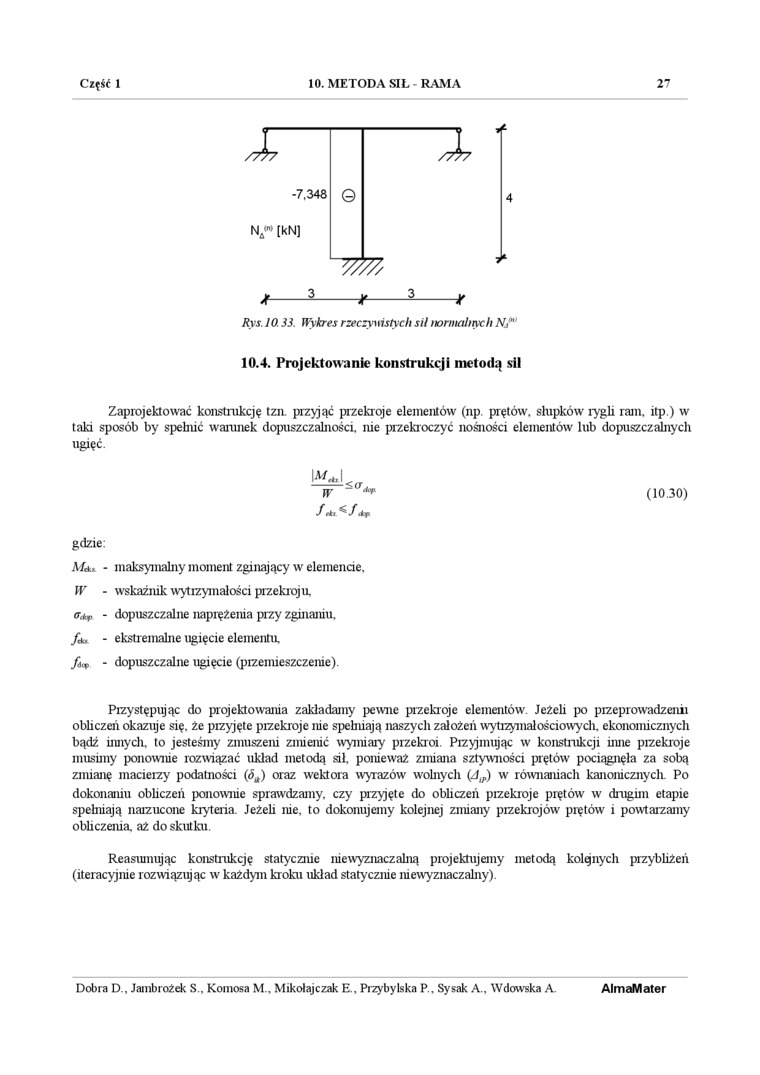
Rys. 10.33. Wykres rzeczywistych sil normalnych Nf" 10.4. Projektowanie konstrukcji metod;) sil
Zaprojektować konstrukcję tzn. przyjąć przekroje elementów (np. prętów, shipków rygli ram, itp.) w taki sposób by spebiić warunek dopuszczalności, nie przekroczyć nośności elementów lub dopuszczalnych ugięć.

(10.30)
gdzie:
Md, - maksymalny moment zginający w elemencie.
W - wskaźnik wytrzymałości przekroju, ffdfi - dopuszczalne naprężenia przy zginaniu. fd, - ekstremalne ugięcie elementu. f&cę - dopuszczalne ugięcie (pizemieszczenie).
Pizystępując do projektowania zakładamy pewne przekroje elementów. Jeżeli po pizeprowadzenii obliczał okazuje się. że przyjęte przekroje nie spełniają naszych założeń wytrzymał ościowy cli. ekonomicznych bądź innych. to jesteśmy zmuszeni zmienić wymiary przekroi. Przyjmując w konstrukcji inne przekroje musimy ponownie rozwiązać układ metodą sił, ponieważ zmiana sztywności prętów pociągnęła za sobą zmianę macierzy podatności (óa) oraz wektora wyrazów' wolnych (JlP) w równaniach kanonicznych. Po dokonaniu obliczeń ponownie sprawdzamy, czy przyjęte do obliczeń przekroje prętów w drugim etapie spełniają narzucone krytena. Jeżeli nie. to dokonujemy kolejnej zmiany przekrojów' prętów i powtarzamy obliczaiia. aż do skutku.
Reasumując konstrukcję statycznie nie wyznacz alną projektujemy metodą kolejnych przybliżeń (iteracyjnie rozwiązując w każdym kroku układ statycznie mewyznaczalny)
AlmaMater
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A.. Wdowska A.
Wyszukiwarka
Podobne podstrony:
Część 1 12. METODA SIL LUKI 16 Dane zadanie rozwiążemy za pomocą bieguna sprężystego (siły
Część 1 12. METODA SIL LUKI 2 4. W zależności od materiału z jakiego są
Część 1 12. METODA SIL LUKI 3 Zatem kąt nachylenia stycznej do krzywej w danym punkcie jest
Część 1 12. METODA SIL LUKI 5 gdzie Q, oznacza pole wykresu pod krzywą q,(x) w granicach od 0 d
Część 1 12. METODA SIL LUKI 8 Równanie kanoniczne w tym przypadku ma postać: (12.17) 6„
Część 1 12. METODA SIL LUKI 14S,:=Air=0 (12.28) Nasze równania przyjmą zatem
Część 1 12. METODA SIL LUKI 21 =» x,=0,31m => x2 = 11,69 m] x:-x,= 11,69-0
Część 1 10. METODA SIŁ RAMA 14 Zgodnie z zasadą superpozycji moment w układzie statycznie
Część 1 10. METODA SIL RAMA 13A,,=
Część 1 10. METODA SIL RAMA 9 (10.7) Gdzie i to numer wykresu jednostkowego (dla A , = 1) oraz
Część 1 10. METODA SIL RAMA 2 Aby układ ten był równoważny układowi rzeczywistemu należy go
Część 1 10. METODA SIŁ RAMA 11 6p EJf f(f^ "fw )+f2 TT*< .Wili] EJ b) Obliczamy
Część 1 10. METODA SIL RAMA 15 a) Sprawdzenie globalne Sumujemy wykresy Z/i Z: aby otizymać wyk
Część 1 10. METODA SIL RAMA 21 E - 206,OJ GPa= 206,01 10*™m J-2140 10~*ni E J=4408,614 kN m: Po
Część 1 10. METODA SIL RAMA 19 ta - równomierne ogrzanie. h - wysokość przekr oju. Mi i Ni - wy
Część 1 9. METODA SIL 3 Przyczynami są siły Xt, X: oraz obciążenie zewnętrzne P. Przemieszczeni
Część 1 9. METODA SIL 19.9. METODA SIL Metoda sił jest sposobem rozwiązywania układów statyczni
IMGP6403 Metoda Sileraleata-Do *»ona: Dla v= 15.8 (w) = 8.121 “ Moc holowania:5lSlZ3 2 -V* = 1.684-1
więcej podobnych podstron