3784493655
Praca Doktorska - Anna Sapińska- Wcisło
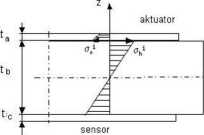
Rys 2.8 Schemat rozkład naprężeń dla przekroju poprzecznego aktywowanej belki.
Zaniedbując naprężenia występujące w sensorze i przemieszczenie osi obojętnej, po całkowaniu momentu równowagi względem osi obojętnej, otrzymamy zależność pomiędzy naprężeniami powierzchniowymi dla belki i aktuatora.
g[ = -Kala 2.18
gdzie:
K_ 3 y
t\ + — (3 tbt2a +4t])
Eb
2 EhJh
Odnosząc się do zależności określającej moment gnący Ma =—-——s'b, stała aktuatora może być określona jako
2.19
KEaEbt2bdn
a 6 ta(Eb+KEa)
Zakładając, że sensor i aktuator połączone są za pomocą układu ze sprzężeniem zwrotnym, napięcie przyłożone na aktuator jest określone zależnością
dV
V = kV +kd—ł 2.20
' Bl
gdzie: kp i kd są odpowiednio proporcjonalnym i różniczkującym współczynnikiem wzmocnienia.
Po podstawieniu równania 2.21 i 2.7 do równania 2.8 otrzymamy następującą zależność definiująca moment gnący:
M„(xt) = C.CA (x)(k + kj ^-) f (x)dx 2.21
dt J0 dx
Efektywna powierzchnia elektrod aktuatora i sensora została doprowadzana do postaci:
15
Wyszukiwarka
Podobne podstrony:
Praca Doktorska - Anna Sapińska- Wcisło Rys. 1.1 Schemat przestawiający mechatroniczne podejście do
Praca Doktorska - Anna Sapińska- Wcisło przyjęcia jest jednorodny normalny rozkład naprężeniem. Poni
Praca Doktorska - Anna Sapińska- Wcisło powyżej temperatury Curie i poddawany działaniu silnego pola
Praca Doktorska - Anna Sapińska- Wcisło Twarde piezoelektryki mają temperaturę Curie około 300°C, wi
Praca Doktorska - Anna Sapińska- Wcisło Działanie sensorów piezoelektrycznych jest oparte na efekcie
Praca Doktorska - Anna Sapińska- Wcisło 2.13 EaEhth(th +ta)d3i 2(Ebt, + Eata) Omówienie drugiego z
Praca Doktorska - Anna Sapińska- Wcisło ba(x) = bs(x) Powyższe wywody zasugerowały zastosowanie płyt
Praca Doktorska - Anna Sapińska- Wcisło austenitu, wtedy próbka powraca do pierwotnego kształtu. Waż
Praca Doktorska - Anna Sapińska- Wcisło w funkcji temperatury; 7’0 - temperatura równowagi
Praca Doktorska - Anna Sapińska- Wcisło PLAN PRACY 1.
Praca Doktorska - Anna Sapińska- Wcisło odkształcenie ogrzanie Faza macierzysta
Praca Doktorska - Anna Sapińska- Wcisło 5.1 Opis stanowiska z zastosowaniem płytek
Praca Doktorska - Anna Sapińska- Wcisło1. Wstęp 1.1 Wprowadzenie Połączenie inżynierii materiałowej
Praca Doktorska - Anna Sapińska- Wcisło Newtonowskie, w którym naprężenie ścinające jest proporcjona
Praca Doktorska - Anna Sapińska- Wcisło Kolejnym materiałem należącym do grupy smart są materiały
skanuj0004 Na rys. 2.6 przedstawiono rozkłady naprężeń stycznych w przekroju poprzecznym pręta wykon
Praca Doktorska - Anna Sapińska-
więcej podobnych podstron