6830719085
PRZEKŁADNIE ZEBATE PROSTE (POJEDYNCZE! I ZLOZONE
Ruch przekazywany jest dzieła wzajemnemu zazębianiu sie zebow kola czynnego i biernego. Jeżeli w przekładni występuję jedna para kol współpracujących to nazywana jest ona pojedyncza.
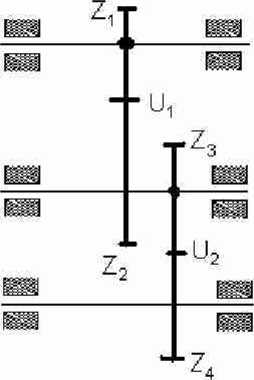
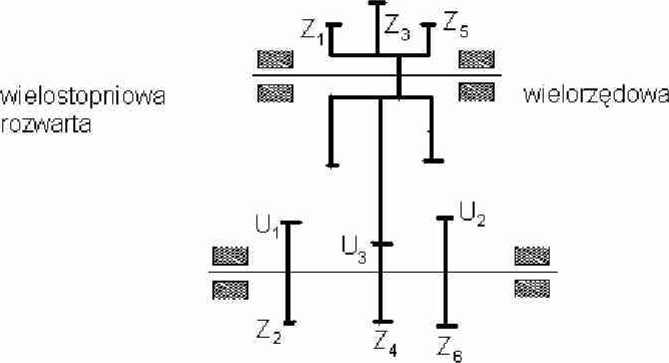
Jeżeli występują dwie lub wiecej par kol to nazywamy je złożonymi .Przekładnie zlozone powstają z pojedynczych .W zależności od ustawienia przekładni pojedynczych , przekładnie zlozone dzieła sie
na wielostopniowe i wielorzedowe .
Rodzaje przekładni prostych;
-walcowe o uzębieniu zewnętrznym (prostym ^kośnym, daszkowym)
-walcowa o uzębieniu wewnętrznym prostym -zębatkowa
-kątowe o uzębieniu (prostym, skosnym, łukowym)
-wichrowata o uzębieniu łukowym -ślimakowa
Zarysy zebow przekładni zębatych.
Pod pojęciem zarysu zęba rozumie sie właściwie kształt bocznej ( roboczej) pow. zęba. Przekrój poprzeczny tej powierzchni określa jej zarys zwany zarysem zęba.
Zarys zęba jest odcinkiem jakiejś linii np: linia prosta, odcinki okregow,epicykloidy .hipocykloidy,
ewołwenty - ma najwięcej zalet. Kształt tych linii ma wpływ na wiele cech użytkowych przekładu.
ZALETY:
Zarys ewolwentowy:
-niewrazliwosc na zmiany odległości kol
-możliwa jest obrobka kol dokładnymi metodami obwiedniowymi -stały kierunek siły miedzyzebnej, dzieła czemu brak jest zrodla drgań -duża sprawność Zarys cykloidalny
-duże pole dolegania zebow, przez co naciski powierzchniowe jednostkowe sa stale
Wyszukiwarka
Podobne podstrony:
DSC00307 (14) Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest obrotowy, wokół przekąt
DSC00296 (18) Rozwiązanie Punkt M jest w mchu złożonym. Ruch unoszenia jest ruchem jednostajnie przy
mechanika113 Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest ruchem jednostąinli przy
mechanika113 Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest ruchem jednostąinli przy
Przekładnie Zębate012 wykruszania w zależności od tego, czy jest zaciskany w szczelinie, czy też z n
Przekładnie Zębate090 (6.8)= (1,6- 2,0)10“3w, jeśli jedno z kół jest stalowe o twardości FHhb < 3
mechanika118 Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest obrotowy, wokół prze kąt
Przekładnie Zębate021 kół zębatych lub korpusy kół zębatych, na które nakłada się wieńce zębate wyko
39 (407) INNE SUROWCE SKROBIOWĄ rytus. Do gorzelni przekazywana jest mąka nie nadająca się ani do ko
instalacje069 1. WSTĘP 22 przekładni zębatej z czterokrawędziowym suwakiem sterowniczym 3. Suwak jes
Ruch ogólny,?finicja, równania ruchu, prędkość (2) Przemieszczenia bryły w ruchu ogólnym Ruch ogólny
DSC00304 (18) Kottfkzanie punkt M jest w ruchu płożonym. Ruch panoszenia jest obrotowy jednostajny,
DSCN0609 254 6. Przekładnie zębate stożkowe Walec dopełniający jest styczny do sfery I na linii środ
DSCN0613 262 6. Przekładnie zębate słoikowe walcowej przekładni zastępczej (patrz pkt 6.6) jest równ
Przekładnie Zębate020 Istotnym czynnikiem decydującym o trwałości przekładni jest również wytrzymało
Przekładnie Zębate031 riału, obróbki cieplno-chemicznej i metod wytwarzania półwyrobu (odlew, odkuwk
Przekładnie Zębate036 3.2. Współczynnik smarowania ZL Wpływ filmu smarnego jest w pełni uwidoczniony
Przekładnie Zębate055 Jednakże w obliczeniach komputerowych wygodniej jest korzystać z podanych wzor
więcej podobnych podstron