1098872593
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Pomiar geometrii układu jezdnego_
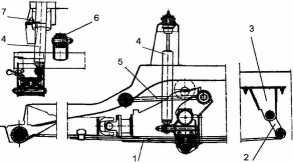
Rys. 2. Zawieszenie tylne samochodu FSO Polonez: 1- resor, 2 - wieszak resoru, 3 - tylny wspornik resoru, 4 - amortyzator, 5 - drążek reakcyjny, 6 - tuleja metalowo-gumowa, 7 - zderzak elastyczny (Morawski, 1995).
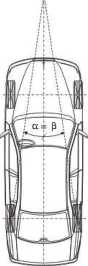
Rys. 3. Oś symetrii samochodu i oś geometryczna jazdy (Juziuczuk iin., 2011).
Nieprawidłowe działanie zawieszenia objawia się zbaczaniem samochodu z zamierzonego kierunku jazdy (ściąganie), nierównomiernym lub nadmiernym zużywaniem się opon, utrudnionym prowadzeniem samochodu, nadmiernym bujaniem lub przechyłami oraz stukami w zawieszeniu. Samochód powinien cechować się, przede wszystkim łatwością w prowadzeniu jego w każdych warunkach oraz tzw. jazdą w pożądanym kierunku. Uzyskuje się to głównie przez odpowiednią konstrukcję układu jezdnego oraz prawidłowe ustawienie kół samochodu. Producenci samochodów ustalają optymalne wartości parametrów charakteryzujących ustawienie kół. Utrzymanie ich w granicach tolerancji zwiększa bezpieczeństwo jazdy samochodem, szczególnie przy większych prędkościach jazdy. Można to zapewnić przez okresową kontrolę ustawienia kół samochodu za pomocą specjalnych przyrządów. Okresowa kontrola i korekcja ustawienia kół ma również aspekt ekonomiczny. Pozwala na wydłużenie okresu użytkowania opon oraz zapewnia ich równomierne zużycie.
Geometrię kół samochodowych charakteryzują następujące wielkości:
- oś symetrii samochodu,
- geometryczna oś jazdy,
- zbieżność kół,
- kąt pochylenia koła,
- kąt pochylenia sworznia zwrotnicy,
- kąt wyprzedzenia sworznia zwrotnicy, kąt sumaryczny,
- odchylenie geometrycznej osi jazdy od osi symetrii,
- nierównoległość osi,
- różnica kątów skrętu przy skręcie kół o 20°.
Oś symetrii jest linią środkową przebiegającą przez środki osi przedniej i tylnej (rys. 3). Nieprawidłowa zbieżność kół tylnych albo nierówno legły rozstaw osi mogą być przyczyną tego, że pojazd nie porusza się wzdłuż swojej osi symetrii. Geometryczna oś jazdy jest prostą (dwusieczną) dzielącą kąt całkowity zbieżności kół tylnych na dwa równe kąty (rys. 3).
Mnstrukcja do zajęć laboratoryjnych
Wyszukiwarka
Podobne podstrony:
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Pomiar geometrii układu jezdnego_ Rys. 11. Sposoby
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Pomiar geometrii układu jezdnego_ sprawdzana w st
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Pomiar geometrii układu jezdnego_ CEL ĆWICZENIA Ce
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Pomiar geometrii układu jezdnego_ 1.
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Pomiar geometrii układu jezdnego_ a)
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Pomiar geometrii układu jezdnego_ Kąt sumaryczny j
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Pomiar geometrii układu jezdnego_ 2.1.
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Pomiar geometrii układu jezdnego_ Zi~Zp 2 gdzie:
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Pomiar geometrii układu
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Ocena stanu amortyzatorów pojazdu zgodnie z SKP 1.
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Ocena stanu amortyzatorów pojazdu zgodnie z SKP_
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Ocena stanu amortyzatorów pojazdu zgodnie z SKP a)
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Ocena stanu amortyzatorów pojazdu zgodnie z SKP_
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Ocena stanu amortyzatorów pojazdu zgodnie z
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW Temat: Ocena stanu amortyzatorów pojazdu zgodnie z SKP Na
LABORATORIUM DIAGNOSTYKI MASZYN I POJAZDÓW _Temat: Ocena stanu amortyzatorów pojazdu zgodnie z SKP_7
Katedra Elektrotechnologii i Diagnostyki Laboratoria z diagnostyki urządzeń elektrycznych Temat:
CCF20130525�001 (2) 86 Praca zbiorowa pod red. J. Pancewicza - geometrią układu jezdnego (skrót GUJ)
więcej podobnych podstron