5097154023
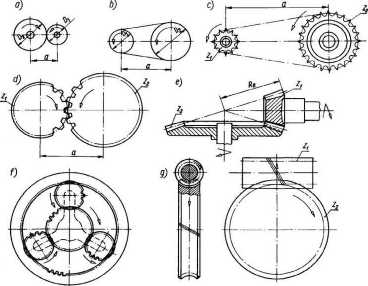
Rys. 1. Rodzaje przekładni mechanicznych: a) cierna, b) pasowa, c) łańcuchowa, d + g) przekładnie zębate d - walcowa, e - stożkowa,/- planetarna, g - ślimakowa Źródło: Rutkowski A.: Części maszyn. WSiP, Warszawa 2003
Ruch obrotowy kół przekładni można scharakteryzować przez podanie prędkości: kątowej co, obrotowej n lub obwodowej v danego koła. Relacje między wymienionymi prędkościami określają zależności:
co,
n-nx 30 ’
°>\
n-n2 30 ’
w których:
coi,2~ prędkość kątowa wyrażona w rad/s, ni,2 - prędkość obrotowa w obr/min;
v,
7t • Dy • Wj 60 ’
przy czym:
v/,2 — prędkość liniowa wyrażona w m/s, D/,2 - średnica w mm.
Podstawową cechą każdej przekładni jest jej przełożenie. Przełożeniem kinematycznym przekładni nazywa się stosunek prędkości kątowej koła czynnego do prędkości kątowej koła biernego. Przełożenie kinematyczne można również określić jako stosunek prędkości obrotowych
._mi _nl co2 n2
W zależności od wartości przełożenia rozróżnia się następujące rodzaje przekładni:
- reduktory (przekładnie zwalniające, i > 1), w których prędkość kątowa koła biernego jest mniejsza od prędkości kątowej koła czynnego,
- multiplikatory (przekładnie przyspieszające, i < 1), w których prędkość kątowa koła biernego jest większa od prędkości kątowej koła czynnego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego"
8
Wyszukiwarka
Podobne podstrony:
IMGc31 (3) Rys. 1. Rodzaje przekładni mechanicznych: a - cicma, b - pasowa ,c - łańcuchowa, M d+g- p
skanuj0256 (4) Rys. 11.3. Przekładnie zębate: a~d) walcowe, e) zębatkowa,stożkowe, i) śrubowa,;) śli
CCF20081203�006 Rys. 11.3. Przekładnie zębate: a+d) walcowe, e) zębatkowa, f^-h) stożkowe, i) śrubow
PRZEKŁADNIE SILNIK -» PRZEKŁADNIA (pasowa, łańcuchowa, cierna, zębata, inne) —► UKŁAD ROBOCZY
IMG00041 41 r4. PRZEKŁADNIE ŁAŃCUCHOWE 4.1. WIADOMOŚCI OGÓLNE Rys. 4.1.2. Rodzaje łańcuchów: a)
24554 Str041 (7) 414. PRZEKŁADNIE ŁAŃCUCHOWE 4.1. WIADOMOŚCI OGÓLNE Rys. 4.1.2. Rodzaje łańcuchów: a
041 3 (rys. 1.5.4.8) Rys. 1.5.4.8. Schemat przekładni pasowej (łańcuchowej) Y 4 wet 2 B ■&?.
177 2 177 -h- t; . -• -7 Rys. 5.33. Rodzaje przekładni: a) przekładnia walcowa z listwą
img244 (4) Rys. 189. Przekładnia łańcuchowa napędza ruchomą drogę pionowych listew 5 i 6 odpowiada s
Przekładnie Zębate111 Rys. 7.2. Rodzaje uzębienia kół stożkowatych - podział wg kształtu linii zębów
więcej podobnych podstron