wykład 3
Ruch krzywoliniowy
Krzywa płaska
M τ V
Δs M1
n Δ*
ρ
0
01 Rys.23 Ruch krzywoliniowy punktu
po płaszczyźnie![]()
średnia krzywizna (34)
krzywizna toru w punkcie (35)
promień krzywizny (36)
Krzywa przestrzenna
pł. normalna
pł. prostująca
pł. ściśle styczna
b
τ
styczna
krzywa n
przestrzenna
normalna główna
ρ binormalna
0
Rys. 24
Prędkość i przyśpieszenie punktu w układzie naturalnym
Ruch płaski
V
M τ at
α M1 Δ*
r Δs
n a
an
OM = r
O
Rys.25 Przyśpieszenie styczne i normalne w ruchu
krzywoliniowym punktu na płaszczyźnie
V = V·τ (36)
(37)
Pochodna wersora τ
n
τ Δτ
Δ*
A τ Rys.26 Przyrost wersora
Po przejściu do granicy mamy:
(38)
gdzie: τ = 1
stąd 
przyrost bezwzględny wersora
Kierunek przyrostu jest zgodny z kierunkiem i zwrotem
wersora n dlatego przyrost wersora τ możemy zapisać
(39)
Podstawiając (39) do (37) otrzymujemy:

(40)
podstawiając do (40) 
, 
otrzymujemy
(41)
gdzie 

przyśpieszenie styczne


przyśpieszenie normalne (42)
![]()


(43)
Przykład 7
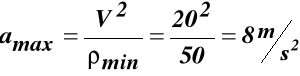
Samochód jedzie po moście z prędkością, której wartość
jest stała i wynosi V = 72km/h. Należy wyznaczyć największe przyśpieszenie samochodu, jeżeli wiadomo, że most ma zarys paraboliczny. Wymiary mostu podano na rysunku 27.
Rozwiązanie
Wartość przyśpieszenia stycznego (42) 
V
h = 1m an x
l /2 = 10m l /2 = 10m
ρ
Rys.27 Geometria mostu
Równanie mostu
; 
; 
(a)
Z matematyki krzywizna linii płaskiej, wstawiając (a)
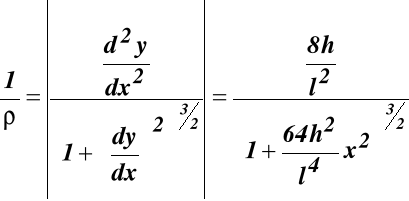
(b)
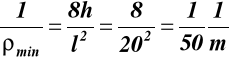
Z (42) wynika, że atmax dla ρmin czyli dla x = 0 patrz (b)
Wstawiając do (b) x = 0, l = 20m, h = 1m, mamy:
Biorąc pod uwagę, że ![]()
, na podstawie
wzoru (42) otrzymujemy
Ruch punktu po okręgu
y
A *
r s
O A0 x
Rys.28 Ruch punktu po okręgu
![]()
gdzie 
ω prędkość kątowa, n prędkość obrotowa,
jeśli n obr min to
(44)
ponieważ ρ = r to
at = rε (45)
gdzie: 
(46)
Przyśpieszenie normalne:

(46)
Przyśpieszenie całkowite:
(47)
Prędkość kątowa i przyśpieszenie kątowe jako wektory
z
V A
e
r
*
O A0
π R
ε
δ
ω
01
Rys.29 Ruch punktu po okręgu
(46)
Prędkość kątowa ω, mająca wartość pochodnej względem
czasu kąta obrotu *, jest wektorem leżącym na osi obrotu.
Moduł wektora prędkości V = ωRsinδ = ωr (47)
V = ω×R (48)
Wektor V jest prostopadły do wektorów ω i R (rys.29).
Przyspieszenie:

(b)
Przyśpieszenie kątowe 
(49)
podstawiamy (49) do (b) i pamiętając że 
otrzymujemy ![]()
(50)
gdzie: ![]()
(51)

(52)
Przykład 8
Punkt A porusza się po okręgu koła o promieniu r = 0.5m
ze stałą co do wartości prędkością. Promień wodzący OA
tego punktu (rys.30) wykonuje przy tym n = 300 obr/min.
należy wyznaczyć przyśpieszenie punktu A.
Rozwiązanie
Wyznaczamy prędkość kątową ω A
0 an
Ponieważ V = const. to at = 0 r
z wzoru (52) mamy:

Rys.30
Przejście między układem naturalnym a prostokątnym
na płaszczyźnie.
ay τ
y
V
n Vy a β at
α
A
l ax Vx
0 x
Rys.31
![]()
![]()
(c)
Ponieważ: 
; 
(d)
Wstawiając (d) do (c) otrzymujemy:
![]()
(53)
Przykład 9
Znaleźć przyśpieszenie styczne i normalne dla ruchu określonego równaniami ruchu:
![]()
m ; ![]()
m
Rozwiązanie
![]()
; ![]()
(e)
![]()
; ![]()
(f)

(g)
wstawiając (e), (f) i (g) do (53) otrzymujemy:
at = 0; an = - 36m/s-2
18kin
19kin
20kin
21kin
y
22kin
23kin
24kin
25kin
Wyszukiwarka
Podobne podstrony:
Mechanika - Kinematyka, kinematykawyklad1, Wykład 1
Mechanika - Kinematyka, kinematykawyklad7, Wykład 7
WYKLAD MECHANIKA kinematyka dynamika PREZENTACJA
Kinematyka wykład, Prywatne, Budownictwo, Materiały, III semestr, od Beaty, Semestr 3, Mechanika 2,
Mechanika - Kinematyka, kinematykawyklad6, Wykład 6
Mechanika - Kinematyka, kinematykawyklad2, Wykład 2
mechanika kinematyka predkosc poczatkowa hustawki
Kinemat, Budownictwo, Mechanika, Kinematyka
Mechanika - Kinematyka, cwiczeniakinematyka3, Ćwiczenia 3
Kol-2R, Budownictwo, Mechanika, Kinematyka
mechanika kinematyka
Kol-1R, Budownictwo, Mechanika, Kinematyka
Mechanika - Kinematyka, cwiczeniakinematyka2, ćwiczenia 2
więcej podobnych podstron