
88
Rozdział 7
MODELOWANIE BIOMECHANICZNE
Szczególne zainteresowanie biomechaników skupia się na modelowaniu i metodach rehabilitacji
ruchu. Za pomocą metod teorii sterowania przeprowadza się analizę aparatu szkieletowo-mięśniowo-
stawowego oraz lokomocji człowieka, na podstawie której tworzone są modele biomechaniczne.
Obecnie zauważa się rosnące zainteresowanie modelami obliczeniowymi, które również nazywane są
„eksperymentami obliczeniowymi”, ponieważ przede wszystkim redukują liczbę kontrowersyjnych
badań na zwierzętach.
7.1. Wprowadzenie do modelowania
W analizie biomechanicznej bardzo ważna jest wiedza na temat geometrycznych i wewnętrznych
cech ludzkiego ciała, aby otrzymać statyczne i dynamiczne dane antropometryczne do budowy modelu
biomechanicznego. Ponadto, model musi obejmować dużą liczbę stopni swobody, aby lepiej
symulować rzeczywisty obiekt. W celu uzyskania tego zadania, najodpowiedniejszym modelem jest
model kinematycznych łańcuchów, gdzie segmenty ciała są połączone za pomocą stawów.
Zgodnie z teorią modelowania, model może być zdefiniowany jako obiekt, istniejący lub
abstrakcyjny, który podczas badań dostarcza informacji na temat rzeczywistego obiektu i powiązanych
z nim zjawisk. W ten sposób modelowanie składa się z opracowania reprezentacji własności obiektu
lub zjawiska w odniesieniu do celu jego analizy. Ogólnie, modelowanie polega na przejściu od obiektu
rzeczywistego, poprzez model fizyczny, do opisu matematycznego.
Model fizyczny to pewne uproszczenie konstrukcji rzeczywistej. Powinien dostatecznie dokładnie
odzwierciedlać zjawiska zachodzące w badanym obiekcie, a jednocześnie być możliwie prosty do
opisu matematycznego. Fizyczne modelowanie jest koniecznym pierwszym etapem procedury
modelowania. W inżynierii mechanicznej, ten etap rozpoczyna się projektowaniem cech graficznych
komponentów systemu, przedstawiających szczyty połączone przez łuki reprezentujące ich
wewnętrzne powiązania. W celu uproszczenia analizy podsystemy są przeważnie identyfikowane i
zamodelowane oddzielnie przez odwrócenie ich związków z resztą systemu w działania zewnętrzne.
Ponieważ model fizyczny jest tylko uproszczeniem rzeczywistości, prawdziwe zjawisko różni się od
zachowania modelu. Z tego powodu określenie cech jakościowych modelu powinno być dokonane ze
szczególną ostrożnością i świadomością konsekwencji każdego wyboru oraz uproszczenia.
Model fizyczny stosowany w mechanice ogólnej może między innymi zawierać pojęcia
abstrakcyjne, bryły idealne, punkty materialne, czy siły skupione. Bryła idealna, to ciało, które pod
działaniem dowolnie wielkich sił nie odkształca się., natomiast punkt materialny to taki, który posiada
zerowe wymiary ale ma masę. Siła skupiona to siła, która jest przyłożona do punktu o zerowych
wymiarach.
89
Po ustaleniu modelu fizycznego, drugim etapem procedury modelowania jest opracowanie modelu
matematycznego. Model matematyczny to analityczny opis badanych zjawisk zachodzących w modelu
fizycznym, który za pomocą wzorów matematycznych tworzy algorytm pozwalający rozwiązać
problem. Model matematyczny przeważnie składa się ze zbioru równań z warunkami brzegowymi i
może być otrzymany bezpośrednio przez odniesienie praw fizycznych zarządzających danym
zjawiskiem lub empirycznie przez zastosowanie procedury identyfikacji bazując na pomiarach
eksperymentalnych. Końcowy etap modelowania polega na uwierzytelnieniu modelu przez
porównanie zachowań teoretycznych z rzeczywistymi. W przypadku nieścisłości należy zacząć
procedurę modelowania od początku, rozpoczynając od modyfikacji modelu fizycznego.
Biomechaniczne badania bazują na wyidealizowanej reprezentacji fizycznej systemu mięśniowo-
szkieletowego, dla którego dokonuje się wstępnych założeń (zweryfikowanych na końcu badań).
Jednak naturalny ruch zawsze obejmuje kilka mięśni, a złożone strategie sterowania neuro-mięśniowe
nie są wciąż znane.
W procesie modelowania wykorzystuje się następujące elementy, które można zdefiniować [41]:
Model – obiekt, plan lub teoria, która reprezentuje lub imituje wiele cech obiektu
rzeczywistego (próba reprezentowania rzeczywistości);
Dedukcja – logiczne rozumowanie ze znanego w nieznane, przechodząc od ogółu do
szczegółu;
Indukcja – logiczne rozumowanie na podstawie faktów lub indywidualnych przypadków do
ogólnej konkluzji;
Uwierzytelnianie modelu – dostarczenie dowodów, iż model jest wystarczająco silny i
skuteczny, wykorzystując:
a) pomiary bezpośrednie – porównanie wyników oszacowanych z modelu z wynikami
rzeczywistymi,
b) pomiary pośrednie – pomiary innych zmiennych i porównanie z przewidywanymi
wartościami tej zmiennej z modelu.
Model biomechaniczny – mikroskopowa i makroskopowa reprezentacja systemu
biologicznego;
Diagram ciała swobodnego (wyswobodzonego z więzów) – uproszczony rysunek systemu
mechanicznego, odizolowanego od otoczenia, pokazujący wszystkie wektory sił i momentów
działających na ciało.
Modelowanie biomechaniczne służy do:
1. otrzymania informacji o strukturze i funkcji systemu biologicznego,
2. uproszczenia zrozumienia struktury i funkcji systemu biologicznego,
3. uproszczenia analizy kinematycznej i dynamicznej systemu biologicznego,

90
4. obserwacji zachowania systemu biologicznego pod wpływem działania różnych. Umożliwia
przewidzenie zagrażających warunków obciążenia bez podejmowania rzeczywistego ryzyka.
5. do celów medycznych: monitorowania funkcji fizjologicznych, takich jak: ruch, przepływ
krwi, wzrost lub rekonstrukcja kości, do diagnozowania nieprawidłowego funkcjonowania
organizmu człowieka, leczenia, terapii, rehabilitacji, zastępowania utraconych kończyn i
organów (protetyka, projektowanie implantów),
6. do celów nie-medycznych: badania wytrzymałości człowieka na obciążenia (np. w
ergonomii), w inżynierii projektowania bezpiecznych pojazdów, poprzez zbadanie
zachowania się ludzkiego ciała podczas wypadków i do zapobiegania urazom: projektowanie
kasków, pasów bezpieczeństwa, poduszek powietrznych, bezpieczeństwa produkcyjnego, itd.
Informacja użyta do budowy modelu to:
1. wiedza na temat układu modelowanego – przy użyciu wiedzy na temat modelu modelowanego
można przejść od zasad bardziej ogólnych do szczegółowych (proces dedukcyjny),
2. dane eksperymentalne, które tworzą wejścia i wyjścia układu, na podstawie których można
wysuwać ogólne wnioski na temat działania układu (proces indukcyjny).
Do budowy każdego typu modelu stosuje się uogólnienie, pamiętając jednak, że uproszczenie nie
zawsze jest zgodne z rzeczywistością. Kluczem w modelowaniu jest wiedza, jakie elementy i ich
wzajemne relacje powinno się uwzględnić, a które można pominąć.
Rozróżnia się następujące typy modeli:
1. analityczne, czyli dedukcyjne,
2. pół-analityczne (semi-analityczne) – użycie wielu założeń, ze względu na większą liczbę
niewiadomych w stosunku do równań w celu znalezienia rozwiązania,
3. czarna skrzynka – modele regresyjne, użycie funkcji do określenia zależności pomiędzy
wejściami a wyjściami,
4. koncepcyjne – używane w testowaniu hipotetycznym.
Modele biomechaniczne mogą występować w różnych formach: modele konceptualne, modele
fizyczne, modele matematyczne (zarówno napisane na papierze, jak i przy wykorzystaniu komputera).
Są to modele struktur (takich, jak mięśnie), modele organów, a także modele systemów organizmów.
Te różne systemy modeli mogą być opracowywane oddzielnie, ale wiedza z nich płynąca może być
łączona w tzw. integracji modeli.
Etapy modelowania biomechanicznego są następujące:
1. zdefiniowanie pytań, na które szuka się odpowiedzi,
2. zdefiniowanie układu,
3. przejrzenie istniejącej wiedzy (przegląd literatury),
4. wybranie procedury tworzenia modelu, która ma zostać zastosowana do uzyskania odpowiedzi
na postawione pytanie, a następnie wybranie metody badawczej,

91
5. ustalenie uproszczeń i założeń, czyli podjęcie decyzji, co powinno znaleźć się w modelu, a co
można pominąć,
6. sformułowanie matematycznego podejścia i metody statystycznej, które zostaną zastosowane
do danych,
7. opracowanie rozwiązania matematycznego,
8. oszacowanie modelu,
9. dyskusja, interpretacja i zastosowanie wyników,
10. wnioski.
Modele biomechaniczne dzieli się na statyczne i dynamiczne [41]:
a. Statyka stosuje stałe prędkości liniowe i kątowe (liniowe i kątowe przyspieszenie =0)
Założenia do analizy statycznej:
- znane anatomiczne osie obrotu,
- jedna grupa mięśni przejmuje sterowanie stawem,
- znane miejsca przyczepienia mięśni,
- znane linie działania mięśni,
- znane wagi i środki ciężkości segmentów,
- brak tarcia w stawach, czyli połączeniach segmentów,
- nie jest rozważany dynamiczny aspekt problemu,
- rozważania tylko w dwóch wymiarach,
- ignorowana deformacja mięśni, ścięgien i kości,
- reguła prawej ręki dla określenia momentów sił.
b. Dynamika stosuje zmienną prędkość liniową i kątową (liniowe i kątowe przyspieszenie
0)
1. Wymiary obiektu:
a. punkt – masa (0 wymiarów),
b. linia (1 wymiar),
c. płaszczyzna (2 wymiary),
d. bryła (3 wymiary).
2. Wymiary przestrzeni:
a. jednoosiowa,
b. dwuosiowa,
c. trójosiowa (trójwymiarowy układ współrzędnych kartezjański).
3. Modele mogą być:
a. jednosegmentowe - używają wewnętrznych i zewnętrznych sił oraz momentów sił.
Brak liniowych i kątowych przyspieszeń, co oznacza, że ciało może poruszać się ze
stałą prędkością,
b. wielosegmentowe - stosują siły reakcji oraz momenty sił pomiędzy segmentami.
Parametry wejściowe do modeli biomechanicznych:

92
1. pomiary bezpośrednie – rzeczywiste pomiary parametrów użytych w modelu (np. waga,
wzrost itd.);
2. pomiary pośrednie – pomiary uzyskane z innych źródeł informacji (np. lokalizacja środka
masy segmentów ciała, proporcje segmentów z całej wysokości ciała, oszacowanie gęstości
segmentów ciała);
3. dynamika odwrotna – użycie liniowych i kątowych parametrów przyspieszenia oraz
informacji o masie segmentów i momencie bezwładności do określenia sił i momentów
obrotowych.
Aby powstał model biomechaniczny człowieka, należy wziąć pod uwagę bardzo złożoną analizę
aparatu mięśniowo-szkieletowego, która powinna obejmować: biomechanikę mięśni, biomechanikę
stawów, badanie kończyn, badanie chrząstek, lokomocję, mechanikę tkanek miękkich i przepływy w
arteriach. W celu przeprowadzenia modelowania biomechanicznego należy przeprowadzić
skomplikowaną analizę i syntezę ruchu, do której należy wykorzystać wiedzę z następujących
dziedzin: mechaniki teoretycznej, mechaniki płynów, elektrotechniki teoretycznej, elektroniki, teorii
sterowania, cybernetyki technicznej, informatyki i bioniki, mechatroniki, itd. Złożone partie ludzkiego
aparatu mięśniowo-szkieletowego są trudne do zamodelowania za pomocą tradycyjnych metod
inżynierskich. W ostatnich latach zaczęto na szeroką skalę stosować modelowanie i symulacje
komputerowe bazujące na metodzie elementów skończonych (MES) [35].
Modele biomechaniczne mają kilka praktycznych ograniczeń:
1. liczba zmiennych sterowania rozważanych w tym samym czasie w modelu jest ograniczona ze
względu na ograniczenie czasu;
2. potrzebnych jest wiele kroków przetwarzania do określenia związków pomiędzy zmiennymi
sterowania oraz działaniami EMG (funkcji matematycznych), które mogą być nieliniowe;
3. wiele modeli oszacowań rzadko bierze pod uwagę indywidualne cechy odróżniające osobniki od
siebie, ponieważ matematyczne modele używają tzw. funkcji celowych do optymalizowania
obciążenia np. kręgosłupa.
7.2. Rodzaje modeli biomechanicznych
Modele biomechaniczne ludzkiego ciała są bardzo ważnymi narzędziami w zrozumieniu
funkcjonowania ludzkiego ruchu i jego koordynacji. Tworzenie modeli biomechanicznych ludzkiego
układu mięśniowo-szkieletowego ma szczególne znaczenie dla analizy zjawisk dynamicznych ciała
człowieka. Techniki komputerowego modelowania biomechanicznego zastosowane do ludzkiego ciała
dostarczają bezinwazyjnych możliwości analizy struktury mięśniowo – szkieletowej. Przykłady tych
modeli obejmują [24,35,41]:
- modele połączonych segmentów, używane do oszacowania kinematyki stawów;
- modele mięśni, użyte do oszacowania indywidualnych sił mięśni oraz energetyki;
93
- symulację oraz metody dynamiki odwróconej do oszacowania koordynacji i optymalizacji strategii
ruchu,
- modelowanie metodą elementów sztywnych do matematycznego i graficznego opisu
komponentów strukturalnych, takich jak: kości, stawy i więzadła, w celu określenia sił, naprężeń i
ich odkształceń;
- modelowanie metodą elementów skończonych;
- metody sztucznych sieci neuronowych do zamodelowania roli systemu nerwowego w sterowaniu
np. ruchem.
Istnieje kilka rodzajów metod tworzenia modeli biomechanicznych. Do najpopularniejszych należy
metoda podziału ciała na segmenty oraz modelowanie za pomocą elementów sztywnych i
skończonych.
7.2.1. Metoda podziału ciała na segmenty
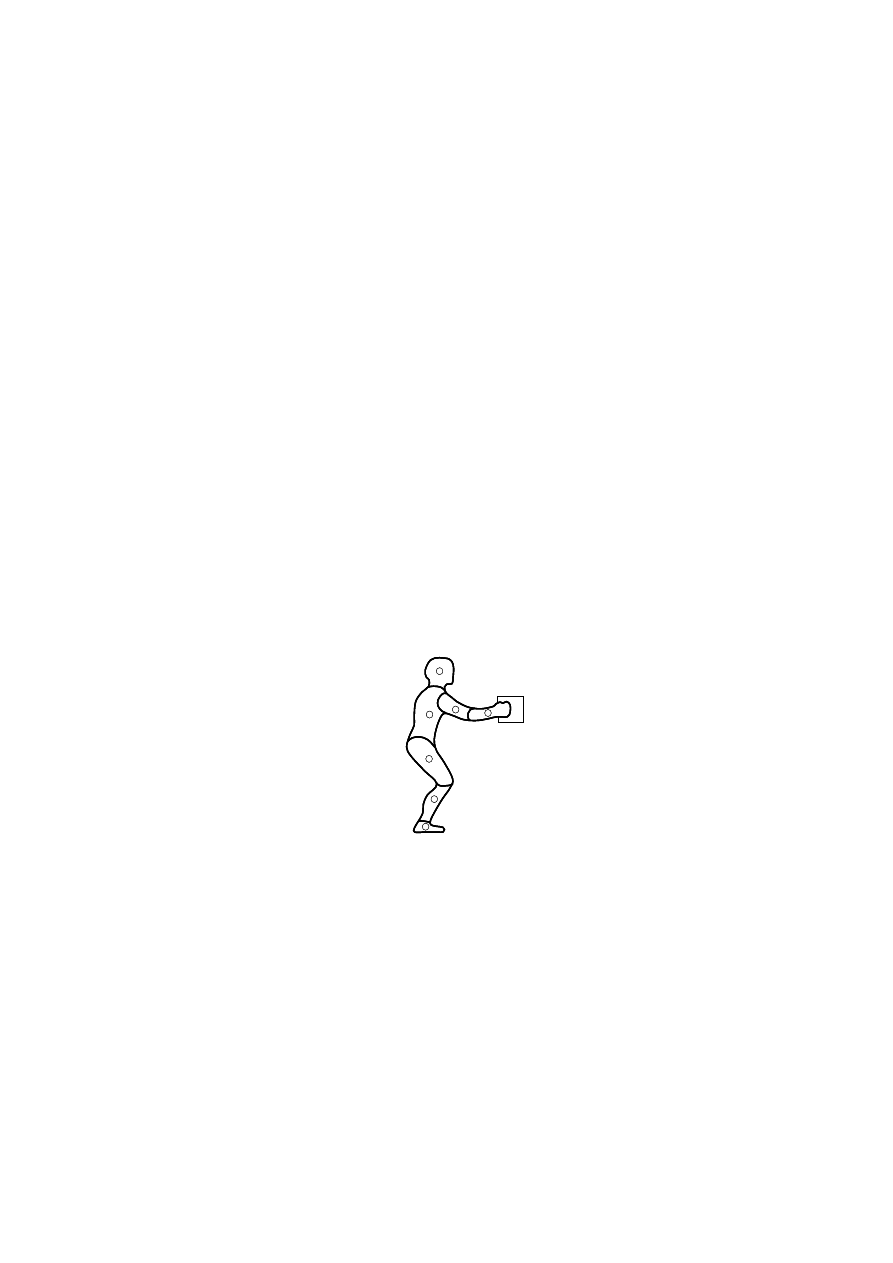
Model ciała można przedstawić jako bryły połączone przez stawy. Model ten opiera się na
uproszczonych założeniach, takich jak jednorodna gęstość w sekcjach przecięcia oraz wzdłuż osi
wzdłużnych segmentu. Elementy wiotkie ciała są pomijane. Zakłada się pełną symetrię ciała w
odniesieniu do płaszczyzny przyśrodkowej, tzn. całkowitą symetrię strony prawej i lewej.
Przykładowy model segmentowy został przedstawiony na rys. 7.1.
Stopa
Łydka
Udo
Tułów
Głowa/szyja
Przedramię
Ramię górne
Środek ciężkości
Obiekt
Stopa
Łydka
Udo
Tułów
Głowa/szyja
Przedramię
Ramię górne
Środek ciężkości
Obiekt
Rys. 7.1. Podział ciała na segmenty [99]
Kształt geometrycznych brył, które reprezentują segmenty ciała, zależy od kształtu segmentu oraz
lokalizacji środka masy. Niektóre liniowe wymiary segmentów ciała są mierzone, a inne określane z
obliczonych wartości i znanych pozycji środków mas segmentów. Po utworzeniu modelu
segmentowego ciała można przeprowadzić statyczną analizę, która wymaga spełnienia pewnych
założeń, a mianowicie:
- znane są anatomiczne osie obrotu,
- tylko jedna grupa mięśni dominuje sterowaniem połączenia między segmentami (stawu),
- znane są punkty zaczepienia mięśni,
- znane wagi segmentów oraz ich środki ciężkości,
94
- brak tarcia w połączeniach,
- brak rozważenia dynamicznych aspektów,
- pomijanie odkształceń mięśni, ścięgien, kości itd.
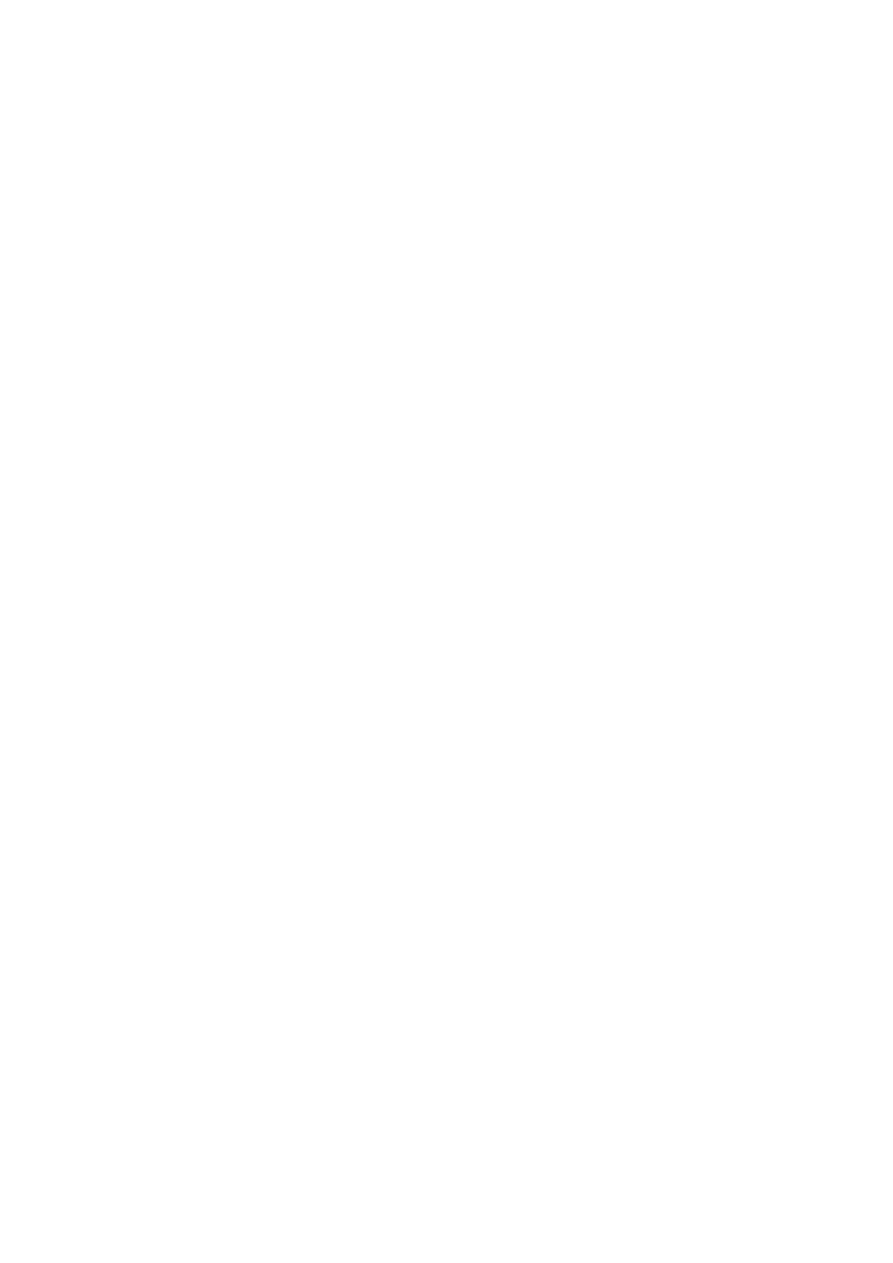
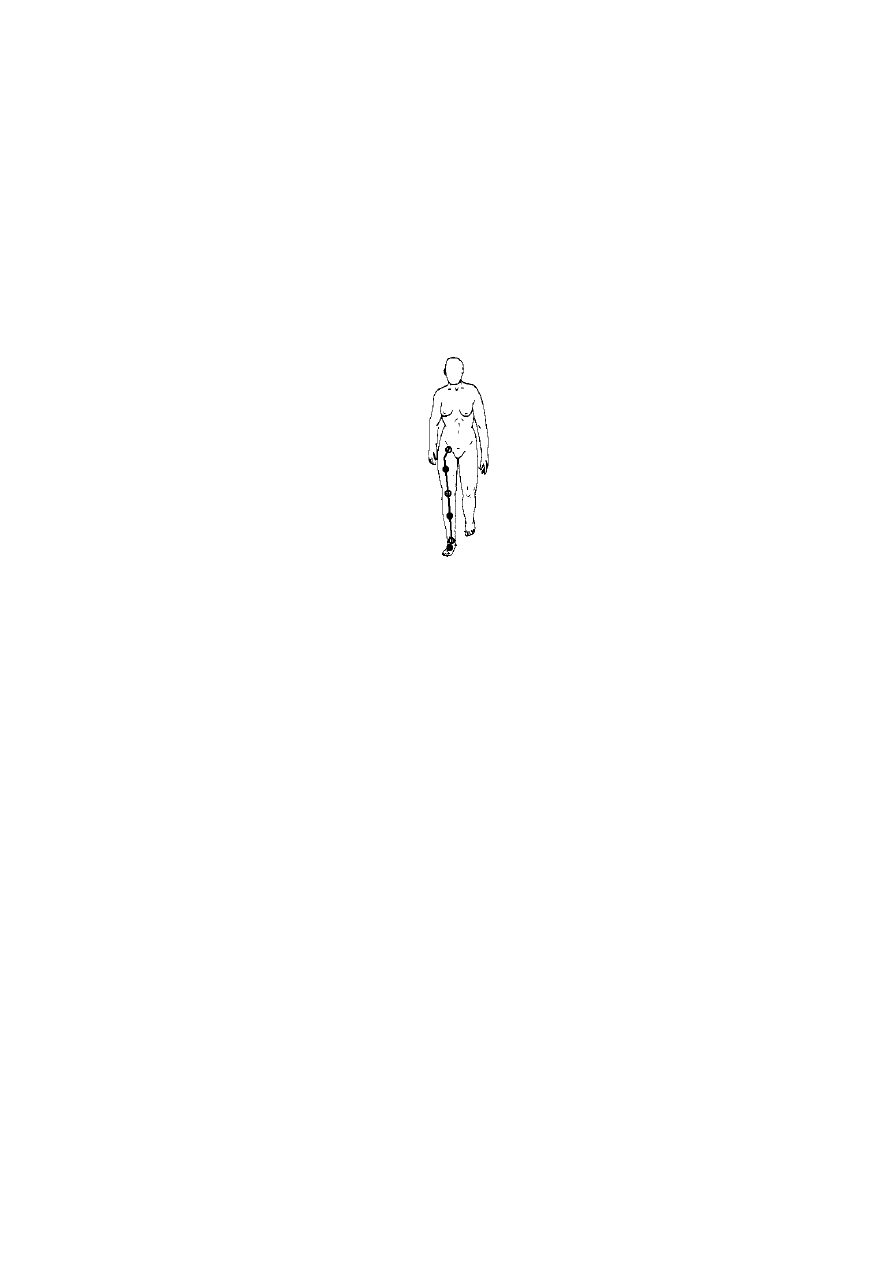
7.2.2. Modelowanie metodą elementów sztywnych
Element sztywny, to element, który nie może być deformowany, rozciągany lub ściskany. Na rys.
7.2 został przedstawiony model ciała, którego cechy obejmują stałe pozycje w odniesieniu do siebie
(rys. 7.2).
Rys. 7.2. Przykład podziału kończyny dolnej metodą elementów sztywnych [99]
Techniki modelowania elementami sztywnymi są używane do określenia napięć, deformacji, sił i
ustawień w systemach biomechanicznych, składających się z komponentów strukturalnych takich jak
kości, połączenia i wiązadła. Połączenia między elementami sztywnymi mogą wykonywać
następujące ruchy:
1. ruch translacyjny,
2. obrót wokół ustalonych osi,
3. ogólny ruch płaszczyzny,
4. ruch dokoła ustalonego punktu (ruch w trzech wymiarach),
5. ogólny ruch (poza powyższymi kategoriami).
Model sztywny jest matematycznym i graficznym opisem pewnego obiektu geometrycznego. Po
zbudowaniu modelu sztywnego może on zostać pokryty siatką i przekształcony w model elementów
skończonych.
7.2.3. Modelowanie metodą elementów skończonych
Modelowanie metodą elementów skończonych (MES) jest techniką obliczeniową, która pozwala na
badanie skomplikowanych struktur, posiadająchych złożoną geometrię i parametry materiałowe. Dla
prostych struktur można stosować rozwiązanie analityczne, ale dla złożonych układów dokładne
rozwiązanie nie jest możliwe przy pomocy metod analitycznych. Metoda elementów skończonych to
m
1
, I
1
m
2
, I
2
m
3
, I
3

95
przybliżona metoda rozwiązania, gdzie dyskretyzuje się złożoną strukturę lub dzieli na skończoną
ilość regularnych kształtów, nazywanych elementami. Każdy element jest opisywany za pomocą
węzłów lub punktów i współrzędnych, które ustalają geometrię struktury. Zachowanie całej struktury
jest przybliżane jako suma odpowiednich odpowiedzi każdego z regularnych kształtów. W
biomechanice analizy struktury wykorzystujące metodę elementów skończonych są bardzo popularne.
Badania obejmują: analizę obciążeń i naprężeń w implantach, przy remodelingu kości, patologiach
tkanek itd. Modelowanie elementami skończonymi zostało również wykorzystane w dziedzinie
rehabilitacji, takiej jak protetyka kończyn dolnych.
Metoda analizy MES jest użyta do określenia naprężeń w materiale, wyjaśnienia problemów
związanych z kontaktem różnych materiałów oraz do optymalizacji projektowania. Analiza metodą
elementów skończonych polega na aproksymacji obiektu za pomocą elementów skończonych, gdzie
każdy węzeł jest powiązany z niewiadomą, która ma być rozwiązana. Przykładowo dla bryły 2-
wymiarowej, nieznanymi mogą być przemieszczenia x i y. Zakłada się, że każdy węzeł posiada dwa
stopnie swobody i proces rozwiązania musi rozwiązać 2n stopni swobody. Każdy węzeł może ulec
przemieszczeniu tworząc tzw. pole przemieszczeń. Po obliczeniu przemieszczeń (odkształceń) są one
różniczkowane przez różniczkowanie cząstkowe w funkcji przemieszczenia, a następnie oblicza się
naprężenia z uzyskanych odkształceń.
Jako wejścia do modelu MES używa się:
- obciążenia – mogą być w formie sił, momentów, ciśnienia, temperatury lub przyspieszeń,
- ograniczenia – jako reakcje dla zastosowanego obciążenia. Mogą przeciwdziałać odkształceniom
postępowym lub obrotowym.
Modele biomechaniczne uzyskane za pomocą metody elementów skończonych są bardzo
potężnymi narzędziami do analizowania anatomicznych struktur biomechanicznych i do opracowania
projektów dla implantów, protez oraz konstrukcji mięśniowo-szkieletowych. Zaletą takich modeli jest
zdolność do brania pod uwagę złożonych geometrii i zachowania materiałów
Wyszukiwarka
Podobne podstrony:
NUMERYCZNE MODELOWANIE PROCESU Nieznany
26(2009) art23 Modelowanie id 3 Nieznany
6 Mimezis model modelowanie id Nieznany (2)
1 wprowadzenie do biomechanikii Nieznany (2)
FIZJOLOGICZNE I BIOMECHANICZNE Nieznany
6 charakterystyka biomechanicz Nieznany
Mozliwosc modelowania procesu s Nieznany
NUMERYCZNE MODELOWANIE PROCESU Nieznany
13 Modelowanie form odziezy dla Nieznany (2)
,Modelowanie i symulacja system Nieznany (3)
cw1 modelowanie id 122786 Nieznany
Lab5 Modelowanie dynamiki id 25 Nieznany
Biomechanika sprawy organizacyj Nieznany (2)
modelowanie ukladow przelaczaja Nieznany
IMW W03 Modelowanie ukladow id Nieznany
biomechanika 1 id 88567 Nieznany (2)
2 Biomechanika uderzenia proste Nieznany
Modelowanie przewozow towarowyc Nieznany
PPK02 modelowanie matinf id 381 Nieznany
więcej podobnych podstron