Wprowadzenie do równań dynamiki maszyn asynchronicznych:
Zgodnie z zasadami transformacji układu trójfazowego do zastępczego układu
dwufazowego, o właściwościach maszyny decydują równania strumieniowo-prądowe.
Dla maszyny asynchronicznej przy stosowaniu założeń upraszczających
uwzględniających jedynie pierwszą harmoniczną pola magnetycznego w szczelinie
powietrznej i idealnej symetrii maszyny, równania te w układzie współrzędnych
naturalnych mają postać:
]
[
]
[
]
][
[
]
][
[
]
[
]
][
[
]
][
[
]
][
[
]
[
s
T
sr
r
rr
r
r
r
r
sr
s
ss
s
s
s
i
M
i
M
i
L
i
M
i
M
i
L
+
+
=
+
+
=
σ
σ
ψ
ψ
gdzie poszczególne macierze mają postać:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
1
0
0
0
1
0
0
0
1
]
[
s
s
L
L
σ
σ
- macierz indukcyjności związanych ze strumieniem rozproszenia stojana
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
°
°
°
°
°
°
=
1
240
cos
120
cos
120
cos
1
240
cos
240
cos
120
cos
1
]
[
ss
ss
M
M
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
−
=
1
2
1
2
1
2
1
1
2
1
2
1
2
1
1
]
[
ss
ss
M
M
-macierz indukcyjności związanych ze strumieniem głównym w obrębie stojana.
Po transformacji polegającej na lewostronnym mnożeniu równań przez
macierz transformacji uzyskamy (niezależnie od przyjętych współczynników
w macierzach transformacyjnych) równania w postaci:
]
][
[
]
[
]
][
[
]
][
[
]
][
][
[
]
][
[
]
][
][
[
]
][
[
]
][
[
]
][
][
[
]
][
[
]
][
][
[
]
][
[
]
][
][
[
]
][
[
1
1
1
1
1
1
s
T
sr
r
rr
r
r
r
r
sr
s
ss
s
s
s
i
s
s
M
s
i
s
s
M
s
i
s
s
L
s
s
i
s
s
M
s
i
s
s
M
s
i
s
s
L
s
s
−
−
−
−
−
−
+
+
=
+
+
=
σ
σ
ψ
ψ
Co sprowadza się do transformacji wartości poszczególnych macierzy
indukcyjności:
-1-

1
]
][
][
[
]
[
−
=
s
L
s
L
αβ
Macierz diagonalna nie zmienia swojej postaci, natomiast macierz
indukcyjności wzajemnych po transformacji uzyska postać:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
0
0
0
0
1
0
0
0
1
2
3
]
[
0
ss
M
M
ss
αβ
Macierz indukcyjności wzajemnych stojan-wirnik zależy od liczby faz wirnika.
Można udowodnić, że każde symetryczne uzwojenie wielofazowe, przy
uwzględnieniu jedynie podstawowej harmonicznej pola, można przedstawić w postaci
równoważnego układu dwufazowego. Dla wirnika klatkowego jako liczbę faz
przyjmuje się liczbę prętów klatki wirnika. Dla uproszczenia analizy przyjmijmy, że
liczba faz wirnika jest równa liczbie faz stojana (silnik pierścieniowy). Przy takich
założeniach macierze indukcyjności wirnika mają postać identyczną jak w stojanie:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
1
0
0
0
1
0
0
0
1
]
[
r
r
L
L
σ
σ
- macierz indukcyjności związanych ze strumieniem rozproszenia wirnika
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
−
=
1
2
1
2
1
2
1
1
2
1
2
1
2
1
1
]
[
rr
rr
M
M
- Macierz indukcyjności związanych ze strumieniem głównym w obrębie wirnika
Po transformacji otrzymamy podobnie jak dla stojana:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
0
0
0
0
1
0
0
0
1
2
3
]
[
0
rr
rr
M
M
αβ
Macierz indukcyjności wzajemnych stojan-wirnik ma postać zależną od kąta
pomiędzy uzwojeniem stojana i wirnika:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
°
+
°
+
°
+
°
+
°
+
°
+
=
α
α
α
α
α
α
α
α
α
cos
)
240
cos(
)
120
cos(
)
120
cos(
cos
)
240
cos(
)
240
cos(
)
120
cos(
cos
]
[
sr
sr
M
M
-2-
Zastosowanie transformacji opisanej wyżej dla równań opisujących maszynę
indukcyjną prowadzi do diagonalizacji macierzy indukcyjności własnych w stojanie i
wirniku. Macierz indukcyjności wzajemnych stojan-wirnik przyjmuje po transformacji
postać:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
=
0
0
0
0
cos
sin
0
sin
cos
2
3
]
[
0
α
α
α
α
αβ
sr
M
M
sr
Uzwojenie wirnika i stojana różnią się liczbą zwojów, liczbą faz (w silniku
klatkowym liczba faz jest równa liczbie prętów wirnika) oraz sposobem rozłożenia
uzwojeń w przestrzeni. Efekt rozłożenia uzwojeń w przestrzeni uwzględnia się
poprzez stosowanie współczynników uzwojenia. Stąd wygodnie jest przekształcić
równania wirnika w taki sposób, aby wielkości występujące w równiach stojana i
wirnika były porównywalne. Zwykle operacje taką przeprowadza się, podobnie jak w
transformatorach, przez zastosowanie przekładni prądowej i napięciowej:
s
s
r
r
s
r
i
k
z
k
z
m
m
=
ϑ
r
r
s
s
u
k
z
k
z
=
ϑ
Przyjęcie takich wartości przekładni prądowej wynika z dostosowania
przepływu wirnika do przepływu stojana, natomiast przekładni napięciowej wynika z
wyrównania sił elektromagnetycznych fazowych wirnika do fazy stojana. Równania w
jednej fazie wirnika można wówczas przedstawić jako:
dt
d
i
R
u
u
r
r
i
i
u
r
u
r
ϑ
ψ
ϑ
ϑ
ϑ
ϑ
+
=
Wielkości wirnika należy przeliczać wg zależności:
u
r
r
u
u
ϑ
=
'
i
r
r
i
i
ϑ
=
'
2
'
)
(
r
r
s
s
r
s
i
u
r
r
k
z
k
z
m
m
R
R
=
=
ϑ
ϑ
2
'
)
(
r
r
s
s
r
s
i
u
r
r
k
z
k
z
m
m
L
L
=
=
ϑ
ϑ
Biorąc pod uwagę definicje współczynnika indukcyjności wzajemnej M
sr
można
wykazać, że:
-3-
sr
u
ss
M
M
ϑ
=
rr
i
u
ss
M
M
ϑ
ϑ
=
Wygodnie jest, po przeliczeniu wielkości strony wirnika na stronę stojana,
oznaczyć wielkości występujące w równaniach jako:
ss
M
L
2
3
=
µ
µ
σ
L
L
L
s
s
+
=
µ
σ
L
L
L
r
r
+
=
'
'
Po wykonaniu takich podstawień otrzymamy równania opisujące zastępczy
silnik posiadający dwa uzwojenia w stojanie i dwa w wirniku.
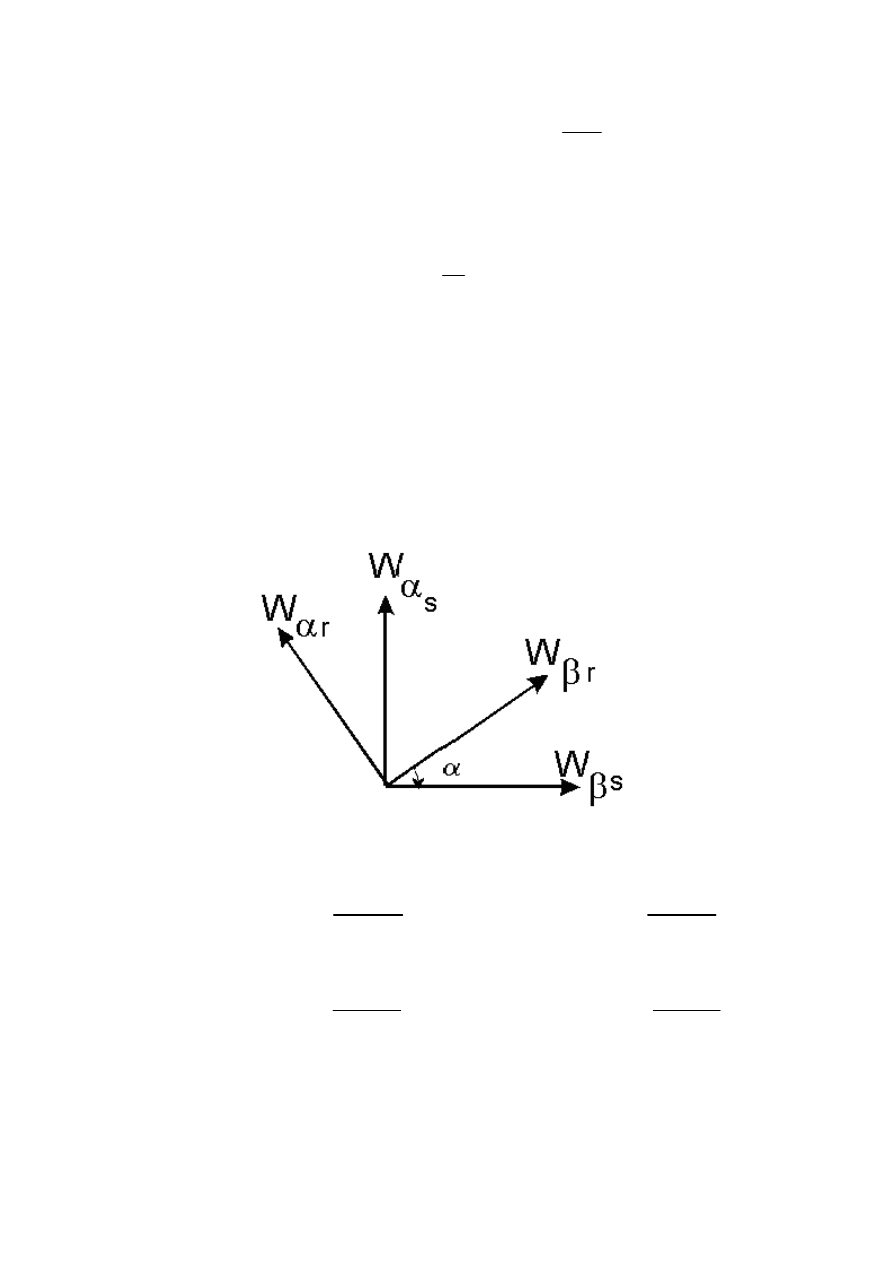
Uzwojenia zastępczej (równoważnej) maszyny dwufazowej można
przedstawić w postaci:
Równania maszyny (przy pominięciu składowej zerowej) mają postać:
dt
d
i
R
u
dt
d
i
R
u
dt
d
i
R
u
dt
d
i
R
u
r
r
r
r
r
r
r
r
s
s
s
s
s
s
s
s
'
'
'
'
'
'
'
'
β
β
β
α
α
α
ψ
ψ
ψ
ψ
β
β
β
α
α
α
+
=
+
=
+
=
+
=
W dalszych równaniach dla uproszczenia opuścimy znak ‘ oznaczający
zastosowanie przekładni prądowej i napięciowej maszyny. Zależności strumieniowo-
prądowe przyjmują postać:
-4-
α
α
ψ
α
α
ψ
α
α
ψ
α
α
ψ
β
µ
α
µ
β
β
β
µ
α
µ
α
α
β
µ
α
µ
β
β
β
µ
α
µ
α
α
cos
sin
sin
cos
cos
sin
sin
cos
s
s
r
r
r
s
s
r
r
r
r
r
s
s
s
r
r
s
s
s
i
L
i
L
i
L
i
L
i
L
i
L
i
L
i
L
i
L
i
L
i
L
i
L
+
−
=
+
+
=
+
+
=
−
+
=
Po pomnożeniu równań z indeksem
β przez j i dodaniu stronami odpowiednich
równań otrzymamy:
)
(
sin
)
(
cos
)
(
)
(
sin
)
(
cos
)
(
β
α
µ
β
α
µ
β
α
β
α
β
α
µ
β
α
µ
β
α
β
α
α
α
ψ
ψ
α
α
ψ
ψ
s
s
s
s
r
r
r
r
r
r
r
r
r
s
s
s
s
s
ji
i
jL
ji
i
L
ji
i
L
j
ji
i
jL
ji
i
L
ji
i
L
j
+
−
−
+
+
+
=
+
+
+
+
+
+
+
=
+
Otrzymamy opis równań strumieniowo-prądowych w postaci zespolonej:
α
µ
α
µ
ψ
ψ
j
s
r
r
r
j
r
s
s
s
e
i
L
i
L
e
i
L
i
L
−
+
=
+
=
Pomnożenie równań wirnika przez wielkość e
j
α
jest równoznaczne
z transformacją równań opisujących wirnik do układu stacjonarnego, otrzymamy:
s
r
s
s
s
i
L
i
L
i
L
i
L
r
r
r
µ
µ
ψ
ψ
+
=
+
=
'
'
'
α
α
ψ
ψ
j
j
r
e
e
i
i
r
r
r
=
=
'
'
Oraz:
dt
d
e
i
e
R
e
u
dt
d
i
R
u
r
r
r
j
j
r
j
s
s
s
s
ψ
ψ
α
α
α
+
=
+
=
'
'
dt
d
e
i
R
u
r
r
r
j
r
ψ
α
+
=
-5-
dt
de
dt
d
e
dt
e
d
dt
d
j
j
j
r
r
r
r
α
α
α
ψ
ψ
ψ
ψ
+
=
=
)
(
'
dt
d
je
dt
d
e
dt
d
j
j
r
r
r
α
ψ
ψ
ψ
α
α
+
=
'
'
'
r
r
r
dt
d
j
dt
d
dt
d
e
j
ψ
α
ψ
ψ
α
−
=
Równana maszyny asynchronicznej przyjmują postać:
s
r
s
s
s
i
L
i
L
i
L
i
L
r
r
r
µ
µ
ψ
ψ
+
=
+
=
'
'
'
u
R i
d
dt
u
R i
d
dt
s
s s
s
r
r
r
r
r
=
+
=
+
ψ
ψ
α ψ
'
'
'
'
- j
d
dt
Wzór na moment elektromagnetyczny uzyskamy po analizie następujących
zależności:
u i
R i i
d
dt
i
u i
R i i
d
dt
i
i
s
s s
s
r r
r r r
r
r r
s
s
s
r
*
*
*
' *
' *
'
' *
'
' *
=
+
=
+
ψ
ψ
α ψ
- j
d
dt
Występujące w równaniach wielkości to:
-6-
a
mechaniczn
moc
}
dt
d
Re{-j
ego
magnetyczn
pola
moc
}
Re{
h wirniku
uzwojaniac
mocy w
straty
nika
obwodu wir
do
a
dostarczon
moc
}
Re{
ego
magnetyczn
pola
moc
}
Re{
stojana
h
uzwojeniac
mocy w
straty
stojana
obwodu
do
a
dostarczon
moc
}
Re{
'*
'
'*
'
*
'*
*
*
*
−
−
−
−
−
−
−
r
r
r
r
r
r
s
s
s
s
i
i
dt
d
i
i
R
i
u
i
dt
d
i
i
R
i
u
r
r
r
s
s
s
ψ
α
ψ
ψ
Moment mechaniczny jest zatem równy:
m
'
'*
'*
'
'*
'
m
m
e
}
Im{
}
Im{
dt
d
}
dt
d
Im{-
p
=
P
=
M
ω
ω
ψ
ψ
ω
α
ψ
α
ω
ω
p
i
p
M
i
p
M
i
r
r
e
r
r
e
r
r
=
=
−
=
=
Jako, że:
*
'*
'*
s
r
r
r
i
L
i
L
µ
ψ
+
=
-7-
Otrzymamy:
}
Im{
}
Im{
'
*
'
'*
r
s
r
r
r
e
i
i
pL
i
i
L
p
M
µ
=
=
Bardzo często operujemy wielkością strumienia wypadkowego wynikającego z
wypadkowego prądu magnesującego:
r
s
i
i
i
+
=
µ
}
Im{
}
Im{
*
*
*
µ
µ
µ
µ
i
i
pL
i
i
i
i
pL
M
s
s
s
s
e
=
+
=
}
Im{
}
Im{
*
*
µ
µ
µ
ψ
s
s
e
i
p
i
L
i
p
M
=
=
Wyprowadzone równania należy uzupełnić równaniem dynamiki masy wirującej:
d
dt
J
M
M
m
e
ω
=
−
1
0
(
)
Równania wyprowadzono przy zastosowaniu transformacji zachowującej moc,
tzn:
[ ]
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
2
1
2
1
2
1
2
3
2
3
0
2
1
2
1
1
3
2
S
Przy stosowaniu macierzy:
[ ]
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
2
1
2
1
2
1
2
3
2
3
0
2
1
2
1
1
3
2
S
Wzór na moment ma wartość zaniżoną, stąd:
}
Im{
2
3
'*
'
r
r
i
p
M
ψ
−
=
-8-
Uwaga!!!
Dostępne są programy symulacyjne dynamiki maszyn asynchronicznych:
-
ASYNCH.EXE – zasilanie sinusoidalne
-
ASYNCH_PWM.EXE – zasilanie z falownika napięcia sterowanego metodą
modulacji szerokości impulsów (PWM)
W obu programach dostępne są wielkości w różnych układach odniesienia:
-
ABC – układ trójfazowy
-
alfa, beta – układ stacjonarny
-
xy – układ wirujący z prędkością synchroniczną
-
dq – układ związany z wirnikiem, wirujący z prędkością wirowania wirnika
Wartość napięcia U określa wartość skuteczną napięcia fazowego, natomiast
w przypadku zasilania z falownika PWM jest to wartość napięcia stałego zasilającego
falownik. Wielkości oznaczone przyrostkiem _i są to wielkości orientowane względem
wektora prądu stojana, _psi – wektora strumienia stojana.
W przypadku zasilania z falownika oprócz częstotliwości napięcia wyjściowego
podawana jest wartość częstotliwości modulacji oraz współczynnik gamma
określający wartość względną napięcia sterującego. Tym współczynnikiem możemy
zmieniać wartość amplitudy pierwszej harmonicznej napięcia wyjściowego
z falownika.
W programach przyjęto transformację w postaci:
[ ]
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
2
1
2
1
2
1
2
3
2
3
0
2
1
2
1
1
3
2
S
-9-
Wyszukiwarka
Podobne podstrony:
maszyny asynchroniczne, dynamika
21 Rodzaje maszyn asynchronicznych[ ver2]
MASZYNA ASYNCHRONICZNA doc
DRUTY, A2 - Maszyna asynchroniczna trˇjfazowa klatkowa, A2
maszyny asynchroniczne stan ustalony
maszyny asynchroniczne wzór klossa
Maszyny asynchroniczne zadania przerobione
Maszyny asynchroniczne
sprawozdanie zmiana prędkości maszyny asynchronicznej
Maszyna asynchroniczna
MASZYNA ASYNCHRONICZNA
maszyny asynchroniczne rysunki pomocnicze id 281914
Maszyny elektryczne - IV semestr- egzamin - 2 maszyna asynch, SZELĄG 4 SEMESTR
Maszyny asynchroniczne, 2
Badanie maszyny asynchronicznej Nieznany
sprawozdania maszyna asynchroniczna Elektrotechnika Wróblewski Czajkowski Rosman piatek od10 do13
więcej podobnych podstron