Automatyczne monitorowanie i nadzór
wytwarzania
AUMON-L30
Kierunek Automatyka i Robotyka (
AiR
),
sem.
6
,
Ćwiczenie
Na4
Temat:
Wykorzystanie sygnałów cyfrowych do
monitorowania przestrzeni roboczej
L.Olejnik, J.Goliński, M.Golemba
Warszawa 2005

AUMON-L30
Na4
Cel ćwiczenia
Zapoznanie się z budową, zasadą działania i możliwościami zastosowania czujników zbliżeniowych w
automatyce i sterowaniu. Poznanie zagadnień obsługi sygnałów cyfrowych w układach monitorowania i
nadzorowania pracujących na stanowiskach produkcyjnych charakteryzujących się krótkimi czasami cykli.
Demonstracja zliczania, wykonywanego za pomocą układu logicznego współpracującego z komputerem PC,
sygnałów dwustanowych przy wykrywaniu ruchomych części czujnikami zbliżeniowymi i optycznymi.
Zadanie problemowe
Dobrać częstotliwość pracy układu zliczającego, odpowiednią do zadania detekcyjnego podanego przez
prowadzącego.
Wprowadzenie
W przemyśle maszynowym jednym z częściej stosowanych sposobów wytwarzania drobnych przedmiotów
metalowych jest wielooperacyjne tłoczenie na prasach. Tłoczenie wykonuje się z dużą szybkobieżnością przy
użyciu zmechanizowanych przyrządów jednoczesnych lub wielotaktowych. Tradycyjne środki nadzorowania
tłoczenia na prasach w swojej istocie koncentrują się na zapewnieniu prawidłowego przebiegu materiału przez
przyrząd służący do produkcji wyrobu. Zadania monitorujące ograniczają się do obserwacji przesuwu materiału
(taśmy/drutu) i usuwania gotowego wyrobu z przestrzeni roboczej. Podstawową akcją podejmowaną przez system
nadzorowania jest niedopuszczenie do wykonania kolejnego cyklu jeśli jakikolwiek z zabudowanych w przyrządzie
czujników wykryje nieprawidłowość. Zakres badanych stanów jest bardzo ograniczony. Głównym celem użycia
narzędzi tego uproszczonego nadzorowania jest zabezpieczenie się przed poważnym uszkodzeniem narzędzi
kształtujących. Do typowych zadań detekcyjnych należy zaliczyć:
• wykrywanie końca taśmy,
• kontrola posuwu wzdłużnego taśmy,
• wykrywanie podwójnej grubości taśmy,
• kontrola usunięcia wykrojki/wytłoczki.
Tradycyjne narzędzia używane do monitorowania przestrzeni roboczej pras podczas tłoczenia z taśmy
budowane są przy użyciu czujników zbliżeniowych: indukcyjnych, pojemnościowych i fotoelektrycznych. Istotą
działania czujników zbliżeniowych jest reakcja na wprowadzenie w strefę ich pracy przedmiotów metalowych
(czujniki indukcyjne i pojemnościowe) lub dielektryków (czujniki pojemnościowe). Czujniki optyczne reagują na
obiekty, które znajdą się na drodze przebiegu wiązki światła.
Sygnał impulsowy, generowany przy przejściu wyrobu przez strefę roboczą każdego z tych czujników, jest
przerwaniem zewnętrznym, które przekazywane jest do aplikacji realizującej sprawdzanie usunięcia wyrobu z
przestrzeni roboczej prasy. Zadaniem sterownika jest natychmiastowe przejęcie przerwania i możliwie bezzwłoczne
wygenerowanie wszystkich niezbędnych sygnałów analogowych oraz cyfrowych sterujących pracą prasy. W wielu
konstrukcjach sterownikowych nie ma możliwości natychmiastowego badania stanu wejść. Najczęściej sprawdzanie
stanu jest możliwe tylko raz w ciągu obiegu programu. Zliczanie impulsów o krótkim czasie trwania jest jedną z
aplikacji, w której konieczne jest natychmiastowe testowanie wejść. Niektóre współcześnie produkowane
sterowniki mają takie możliwości. Do odczytu stanu wejść używają specjalnie przeznaczonych do tego celu
instrukcji. W ćwiczeniu wybrano zastosowanie „korekty sprzętowej”. Polega ona na doborze częstotliwości pracy
zegara systemowego. Jest to równoznaczne z wyborem odpowiednio szybkiego sterownika do monitorowania
tłoczenia na prasie.
W ćwiczeniu sprawdzimy współdziałanie różnych czujników z przeciętnym układem mikroprocesorowym
zdolnym do zliczania impulsów.
Biorąc pod uwagę sposób realizacji zadania detekcyjnego czujniki dzielimy na dotykowe i bezdotykowe.
Czujniki dotykowe
Krańcówki – sygnalizują zetknięcie się z przedmiotem zewnętrznym zwierając obwód poprzez styki
umieszczone wewnątrz obudowy. Czujniki te mają zastosowanie przy sterowaniu maszyn jako przełączniki
sygnalizujące położenie krańcowe przestawnych elementów oprzyrządowania technologicznego i urządzeń
automatyzujących.
Rys.1. „Krańcówka” przemysłowa
2
AUMON-L30
Na4
Czujniki bezdotykowe
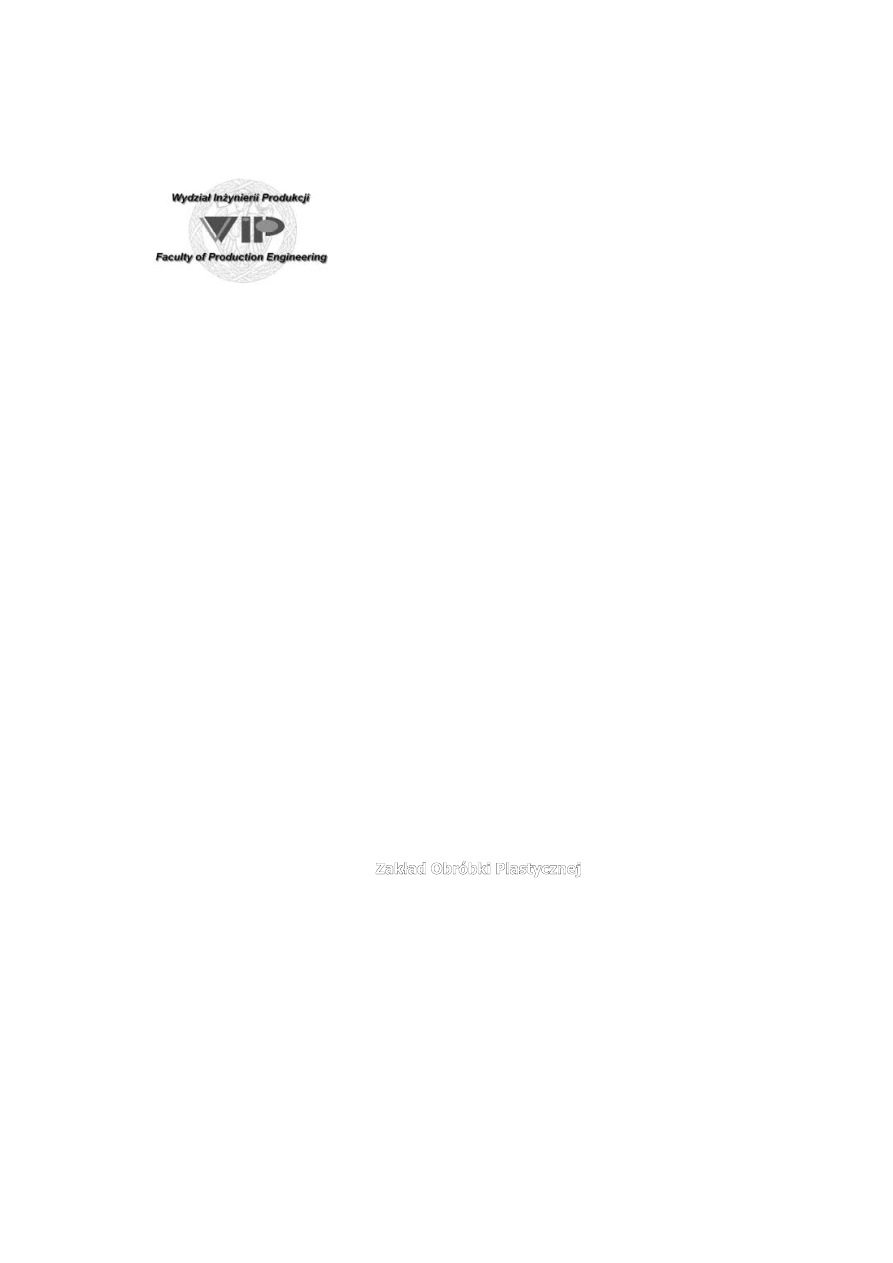
Czujniki indukcyjne –reagują na pojawienie się w polu działania czujnika przedmiotów metalowych. W
obecności metalu obwód drgający zawierający cewkę sensora jest silnie tłumiony, a za pomocą dołączonego
wzmacniacza i elektronicznego przełącznika progowego tworzony jest binarny sygnał wyjściowy(rys. 2). Czujniki
indukcyjne dla bardzo małych odległości zbliżania mają średnicę około 4mm natomiast dla odległości zbliżania do
80mm mają średnicę 80mm. Czujniki te nie posiadają ruchomych części i najczęściej znajdują zastosowanie tam
gdzie występuje wysoka częstotliwość przełączania (nawet do 3000Hz), są niewrażliwe na kurz brud i wibracje,
cechują się wysoką trwałością, ponieważ nie zużywają się mechanicznie, mają zwartą konstrukcję i są łatwe w
montażu a wskazanie zadziałania sygnalizują zaświeceniem się diody sygnalizacyjnej, przez co nieprawidłowe
działanie można wykryć bez potrzeby sprawdzania sygnału elektrycznego na końcach przewodów.
Rys.2. Zasada działania
czujnika indukcyjnego
Najważniejszym parametrem czujnika jest nominalna strefa działania S
n
(rys.3). Definiuje ona odcinek
odmierzany wzdłuż osi czujnika, w którym pojawienie się kwadratowego kawałka blachy stalowej o długości boku
równej średnicy czujnika i grubości 1mm spowoduje jego zadziałanie. W przypadku czujnika do łączenia
promieniowego (z boku), strefa działania nie może być większa niż 0,8xSn.
Rys.3. Strefa działania czujnika zbliżeniowego
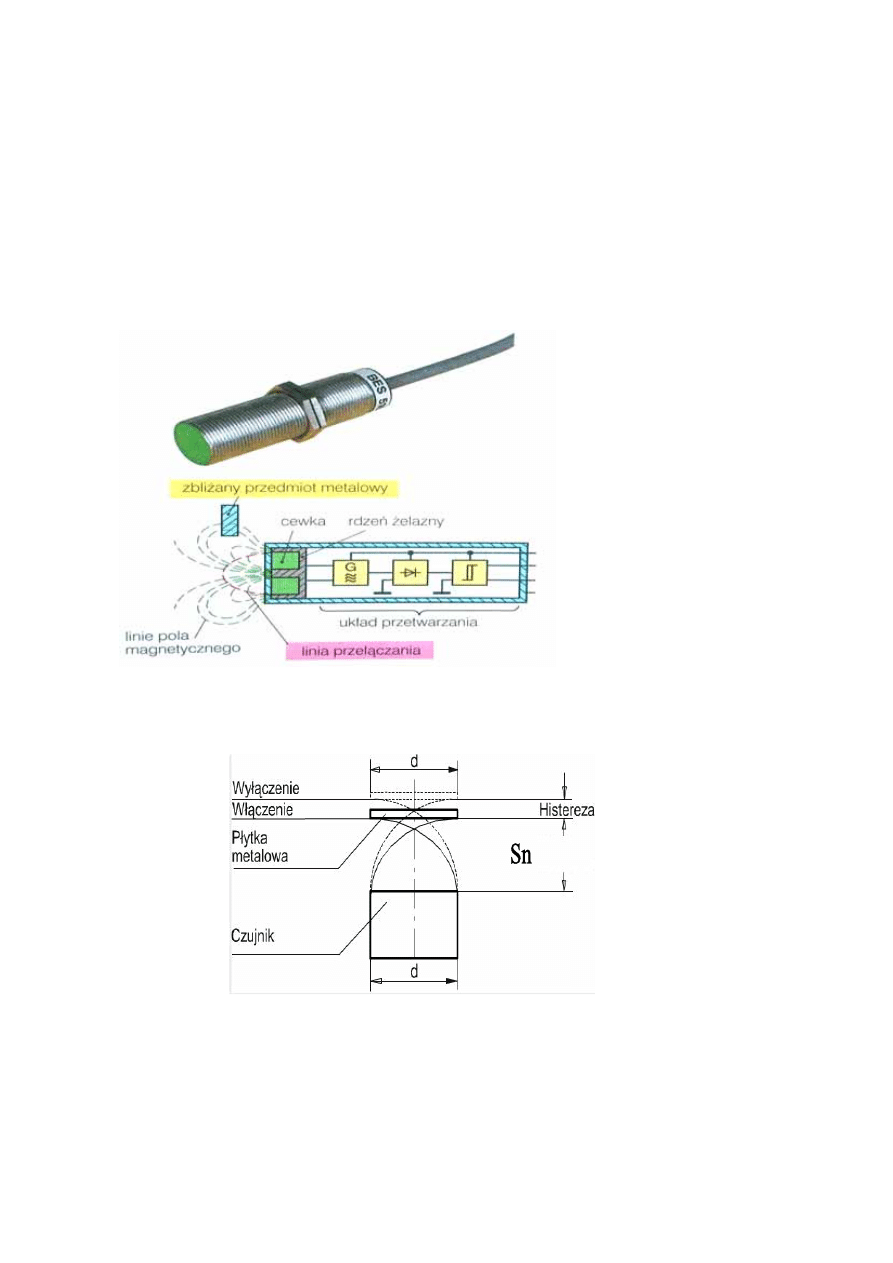
Czujniki pojemnościowe - Czujniki te używane są do bezdotykowego wykrywania wszelkiego typu
materiałów niemetalowych (ceramika, szkło, tworzywa sztuczne, kamień, papier, drewno oraz olej, woda i cement).
Typowe zastosowania to liczenie ilości przedmiotów, nadzór nad poziomem cieczy lub wskazanie położenia
materiału. Sygnał wyjściowy zmienia się w wyniku zmiany częstotliwości drgań oscylatora, wywołanej przez
zamianę dielektryka w otoczeniu kondensatora - sensora. Czujnik pojemnościowy aktywowany jest w zależności od
pojemności w stosunku do materiału, którego obecność należy wykryć. Im mniejsza stała dielektryczna materiału,
3
AUMON-L30
Na4
tym bliżej materiału należy umieścić czujnik. Sensory te wyposażone są w taką samą obudowę jak czujniki
indukcyjne.
Rys.4. Czujnik pojemnościowy
Czujniki optyczne - elementy automatyki, których działanie opiera się na zasadzie wysyłania wiązki
promieni świetlnych przez nadajnik i ich odbieraniu przez odbiornik. Czujniki optyczne reagują na obiekty, które
znajdują się na drodze przebiegu wiązki światła. Zaletą tych czujników są duże zasięgi działania uzyskiwane dla
małych obudów czujników. Szeroki zakres wykonań konstrukcyjnych czujników, użyte do ich realizacji układy
elektroniczne i uzyskane parametry techniczne zapewniają dużą przydatność czujników optycznych w automatyce
przemysłowej. Najczęściej czujniki optyczne są oferowane w następujących wykonaniach konstrukcyjnych:
odbiciowe, refleksyjne oraz typu bramka świetlna jedno lub wielowiązkowa. Charakterystycznymi parametrami
czujników optycznych są:
Strefa czułości - dla czujników odbiciowych jest to maksymalna odległość od czoła czujnika karty
pomiarowej, (biały karton o wymiarach 20x20cm) zbliżanej wzdłuż osi wiązki świetlnej, przy której następuje
przełączenie obwodu wyjściowego czujnika.
Zasięg działania - dla czujników optycznych refleksyjnych jest to maksymalna odległość od czoła czujnika
reflektora odblaskowego lub dla czujników typu bariera maksymalny odstęp między nadajnikiem i odbiornikiem
bariery, które zapewniają poprawne działanie czujników w warunkach przerwania promieni świetnych przez obiekt
znajdujący się wewnątrz zasięgu.
Histereza przełączania - różnica odległości obiektu od czujnika, przy których czujnik zmienia stan obwodu
wyjściowego.
Współczynniki korekcyjne - duży wpływ na strefę działania czujnika optycznego ma wielkość odbitego
światła. Zależy ona od rodzaju materiału, z którego obiekt jest wykonany, od jego barwy, struktury i wymiarów.
Jasne powierzchnie, np. biały papier odbijają silniej niż ciemny, np. czarny karton. Przykładowe współczynniki
korekcyjne dla różnych materiałów, uwzględniające właściwości odbicia światła:
Papier biały matowy 200g/m 2
1
Metal błyszczący
1,2 - 1,6
Styropian biały
1 PCW
szare
0,5
Karton czarny błyszczący
0,3
Karton
czarny
matowy
0,1
Drewno
surowe
0,4
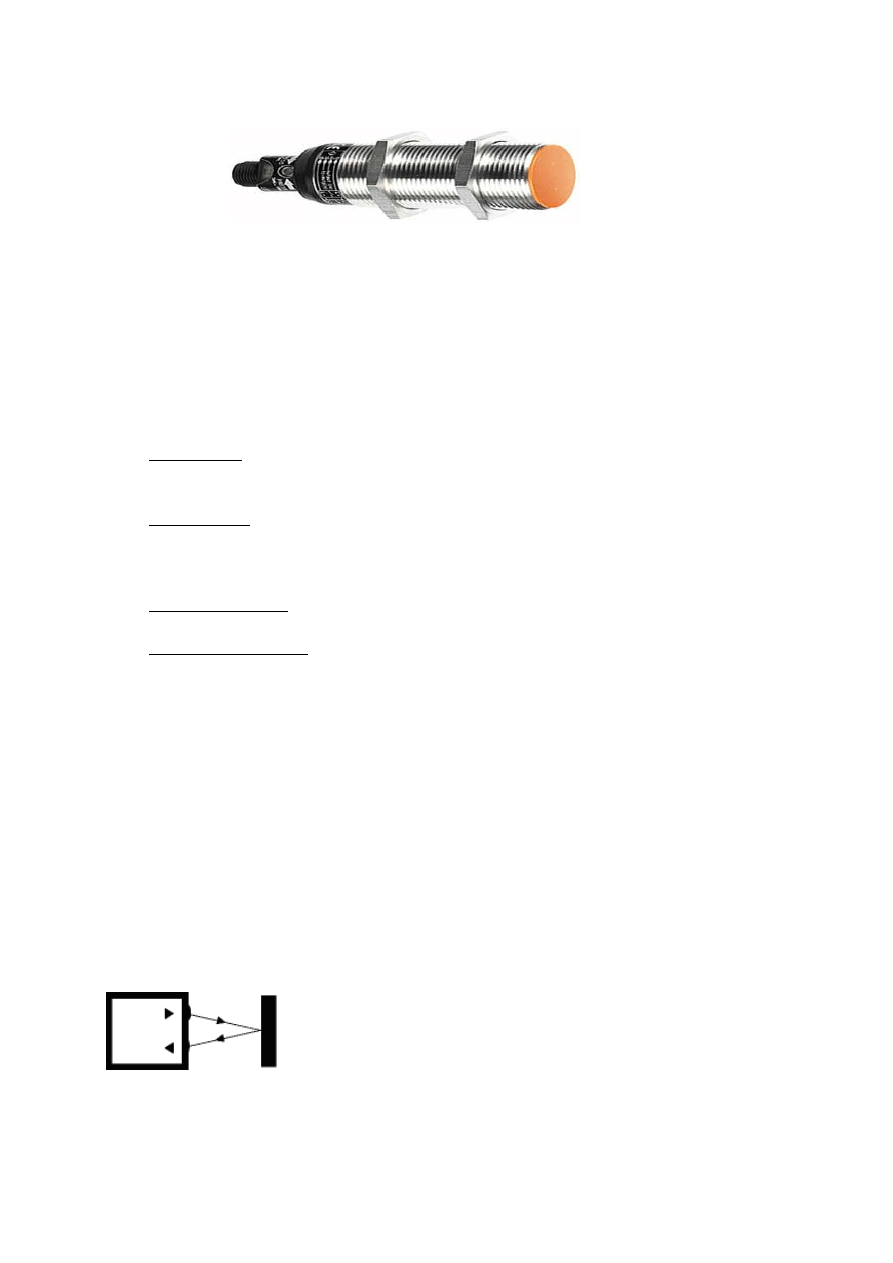
Czujniki optyczne Odbiciowe (TOO) - Nadajnik i odbiornik umieszczone są we wspólnej obudowie.
Reagują na obiekty wprowadzane w strefę działania czujnika zasada działania opiera się na odbijaniu
promieniowania podczerwonego od powierzchni przedmiotu wykrywanego. W momencie zbliżania przedmiotu
wygenerowane przez diodę nadawcza pulsujące promieniowanie podczerwone odbija się od niego i jest odbierane
przez fototranzystor. Promieniowanie pulsujące stosuje się w celu wyeliminowania możliwości zakłóceń światłem
obcym. Elektroniczny układ odbiorczy reaguje tylko na światło pulsujące o stałej częstotliwości. Aby można było
wykorzystywać sensory optyczne w bardzo małych urządzeniach np. w mikro-napędach, promieniowanie wysyłane
i odbierane jest cienkimi, i giętkimi światłowodami z włókna szklanego.
Rys.5. Zasada działania czujnika TOO
4
AUMON-L30
Na4
Rys.6. Czujnik odbiciowy
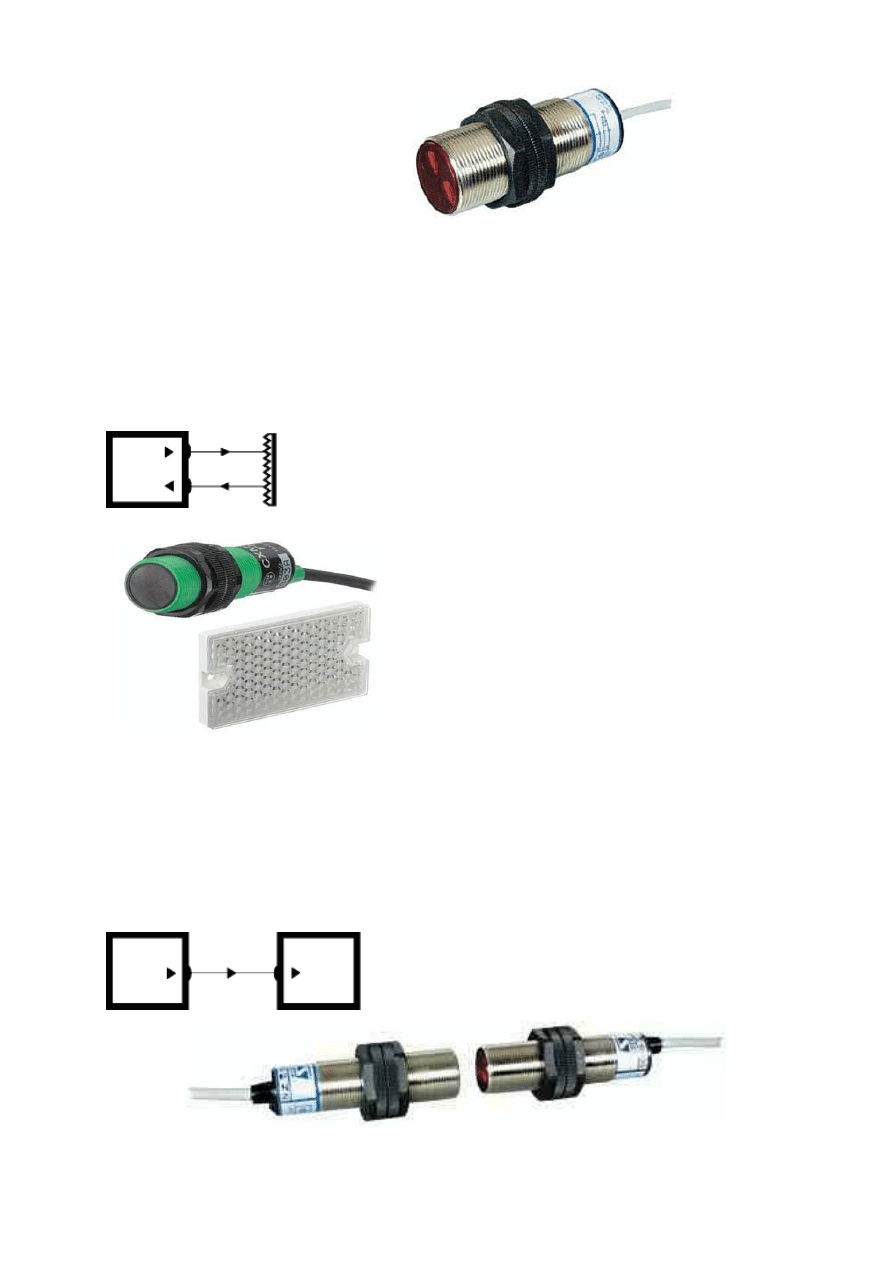
Czujniki optyczne Refleksyjne (TOR) - Nadajnik i odbiornik umieszczone są we wspólnej obudowie,
skierowane one są w końcowy punkt zasięgu, w którym jest umieszczony specjalny reflektor odblaskowy, od
którego odbija się wysyłana przez nadajnik wiązka promieni świetlnych. Pojawienie się przedmiotu po między
czujnikiem a odblaskiem powoduje przecięcie wiązki promieni świetlnych, czego następstwem jest przerwanie
transmisji i przełączenie obwodu wyjściowego czujnika. Dużą zaletą tych czujników jest większy zasięg, który
dochodzi nawet do 12 m w porównaniu z czujnikami optycznymi odbiciowymi, oraz brak wrażliwości na kolor
obiektu.
Rys.7. Zasada działania czujnika refleksyjnego
Rys.8. Czujnik refleksyjny wraz z reflektorem
odblaskowym
Czujniki optyczne: Jednowiązkowe bariery świetlne (TOB) - nadajnik i odbiornik umieszczone są w tym
przypadku w oddzielnych obudowach, które mają oddzielne zasilanie. Wiązka światła przebiega wzdłuż jednej osi
poprzez przestrzeń od nadajnika do odbiornika, umieszczonych naprzeciw sobie w skrajnych punktach zasięgu.
Przecięcie wiązki promieni świetlnych przez obiekt powoduje przerwanie transmisji i przełączenie obwodu
wyjściowego czujnika. Ten typ czujnika stosuje się do wykrywania obiektów nieprzezroczystych, także
odbijających promienie świetlne. Czujniki te mają najdłuższe strefy działania w porównaniu z czujnikami
odbiciowymi i refleksyjnymi (do 50m).
Rys.9. Zasada działania bariery świetlnej
Rys.10. Nadajnik i odbiornik jednowiązkowej bariery świetlnej
5
AUMON-L30
Na4
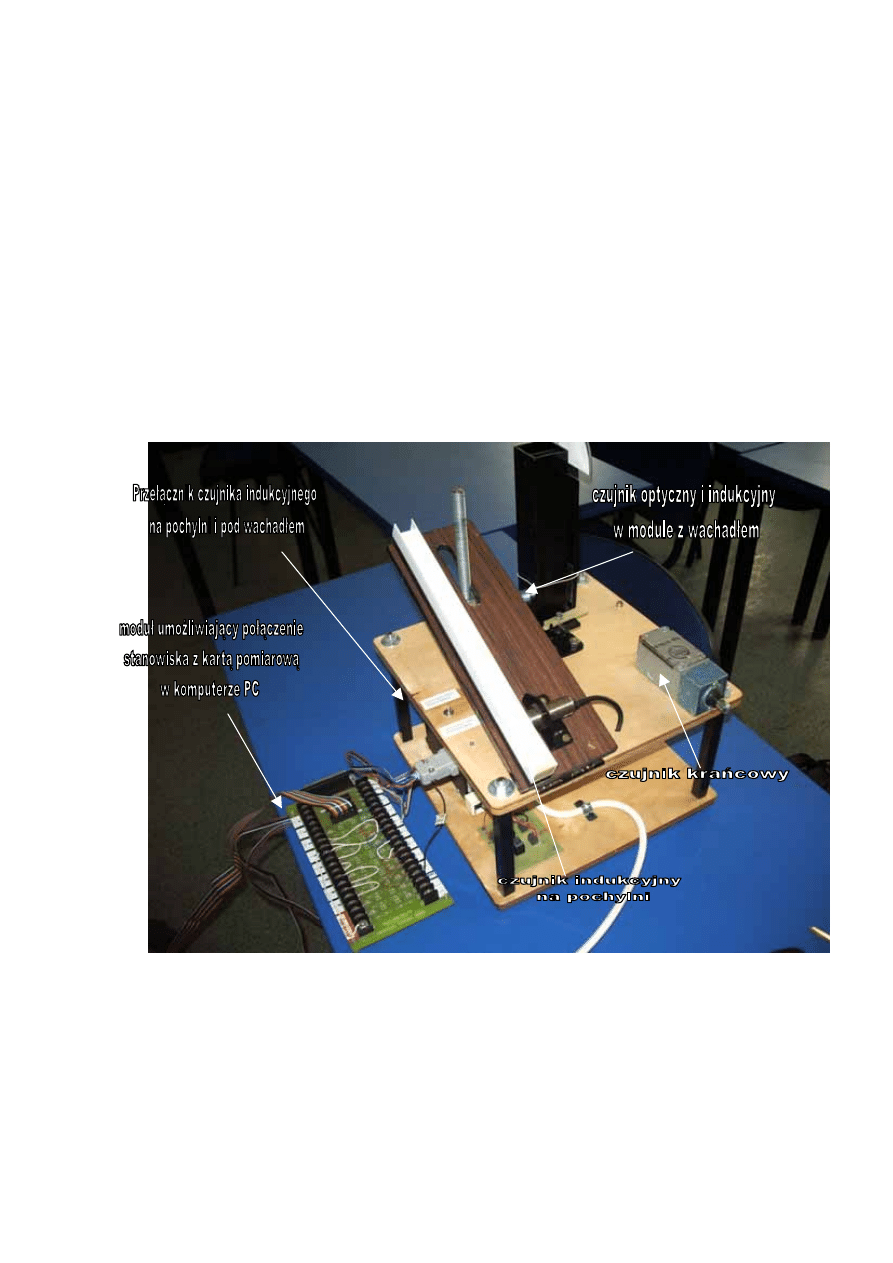
Stanowisko
Stanowisko badawcze składa się z czujnika indukcyjnego umieszczonego na pochylni z regulacją pochylenia,
czujnika indukcyjnego umieszczonego pod wahadłem w rurze o profilu kwadratowym i czujnika optycznego
umieszczonego w rurze na wprost wahadła oraz czujnika krańcowego. Na stanowisku zamontowany jest przełącznik
2 pozycyjny umożliwiający zbieranie sygnałów z czujnika indukcyjnego na pochylni albo pod wahadłem.
Do zliczania impulsów użyto układ PCL-814b zainstalowany w komputerze PC. Wejście cyfrowe (DI -
Digital Input) tego układu obsługuje poziomy logiczne zgodne ze standardem TTL (Transistor -Transistor Logic)
· zero logiczne ‘0’ :
0.8 V max.
jedynka logiczna ‘1’ :
2.0 V min.
Linie sygnałowe podłączane są za pomocą płaskiego przewodu wielożyłowego zakończonego 20-stykową
wtyczką. Przewód ten łączy układ PCL-814b z modułem przyłączeniowym PCLD-880, widocznym na rys.11.
Przebieg ćwiczenia
Przed wykonaniem zadań detekcyjnych należy w programowalnym sterowniku układu PCL-814b
skonfigurować operacje związane z trybem pracy zegara-licznika, który zlicza impulsy z odpowiednią
częstotliwością. Po włączeniu komputera należy uruchomić program PCL-816.exe. Aplikacja ta instaluje sterownik
karty PCL-814b jak również inicjalizuje ustawienia sprzętowe. Następnie, przy pomocy programu testującego
IN.EXE można sprawdzić reakcję wejścia karty obserwując na monitorze komputera aktualny stan wejścia,
zmieniający się podczas załączania czujników. Stan wejścia przedstawiany jest w postaci dziesiętnej.
Rys.11. Stanowisko pomiarowe ćwiczenia Na4
W celu uzyskania prawidłowego odczytu wejść cyfrowych karty należy dobrać odpowiednią częstotliwość
pracy układu zliczającego impulsy. W przypadku ustalenia częstotliwości odczytu danych wejściowych niższej lub
równej częstotliwości sygnałów docierających do karty nie będą one odebrane prawidłowo. Programowanie
częstotliwości zegara układu odczytującego wejścia cyfrowe polega na podaniu dwóch parametrów umownie
oznaczonych jako A i B. Częstotliwość F zegara układu wyrażona jest wtedy wzorem:
F = 10 MHz / (A*B)
Parametry A i B mogą przyjmować wartości w zakresie od 2 do 65535.
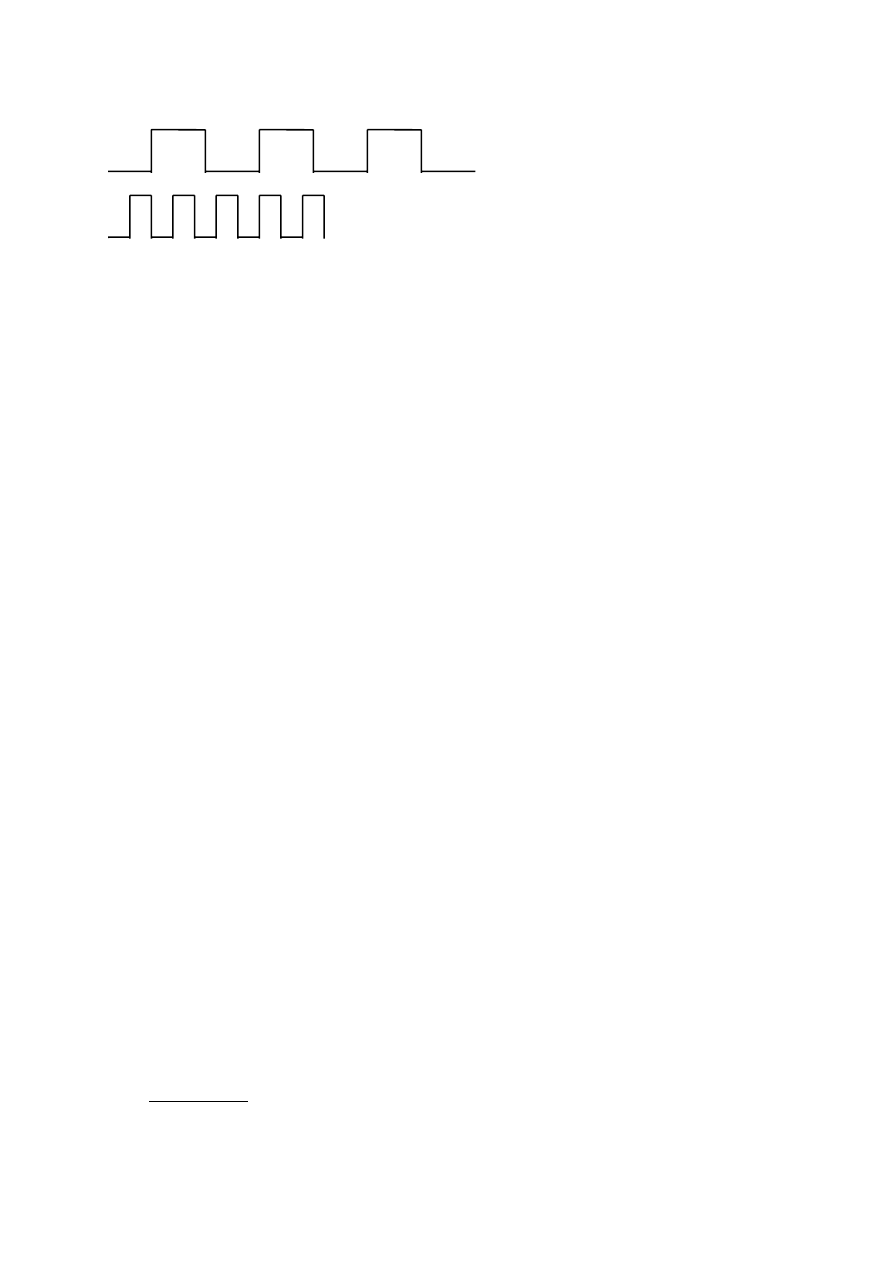
Na rys.12 przedstawiono przykład gdy częstotliwość sygnału taktującego wejście jest zbyt mała w
porównaniu z częstotliwością sygnałów odbieranych. Przy założeniu że odczyt następuje przy stanie ‘1’ sygnału
taktującego, część impulsów nie zostanie odebrana.
6
AUMON-L30
Na4
Sygnał taktujący
1
0
Impulsy odbierane
1
0
Rys.12. Przykład nieodpowiedniej relacji między częstotliwością pracy układu logicznego
a częstotliwością sygnałów źródłowych
W ćwiczeniu należy wykorzystać program PCLICZ1.EXE, który odczytuje stan wejścia cyfrowego. Program
ten umożliwia łatwe wprowadzanie nastaw karty tj. ustalenie częstotliwości zegara oraz ustalenie krotności odczytu
danych. Po skonfigurowaniu pracy układu można przejść do realizacji poszczególnych zadań detekcyjnych.
Zadanie 1. Czujnik indukcyjny na pochylni
1. Ustawić w programie PCLICZ1.EXE częstotliwość próbkowania układu zliczającego impulsy.
2. Ustawić kąt pochylenia pochylni wedle zaleceń prowadzącego; obliczyć kąt pochylenia odmierzając
odległości od podstawy do zielonych znaczników na brzegu pochylni.
3. Upewnić się czy przełącznik czujników jest ustawiony właściwie.
4. Umieścić stalową kulkę w krańcowym górnym położeniu w rynience na pochylni.
5. Puścić kulkę i zanotować liczbę zarejestrowanych impulsów przez układ zliczający.
6. Obliczyć prędkość poruszającej się kulki w momencie przechodzenia przez strefę działania czujnika.
Zadanie 2. Czujnik optyczny przed wahadłem
1. Wychylić wahadło do pozycji określonej przy pomocy noniusza kątowego (wartość wychylenia kątowego
poda prowadzący).
2. Puścić wahadło i zanotować liczbę impulsów zarejestrowanych przez komputerowy układ zliczający.
3. Obliczyć prędkość poruszającego się wahadła w momencie przechodzenia przez strefę działania czujnika.
4. Zmierzyć strefę działania czujnika przy pomocy białego kartonu 20x20mm.
Zadanie 3. Czujnik indukcyjny pod wahadłem
1. Wychylić wahadło do pozycji określonej przy pomocy noniusza kątowego (wartość wychylenia kątowego
poda prowadzący).
2. Puścić wahadło i liczbę impulsów zarejestrowanych przez komputerowy układ zliczający.
3. Obliczyć prędkość poruszającego się wahadła w momencie przechodzenia przez strefę działania czujnika.
Zadanie 4. Czujnik krańcowy
1. Włączyć czujnik krańcowy w możliwie jak najkrótszym czasie i zanotować liczbę impulsów
zarejestrowanych przez komputerowy układ zliczający.
2. Podać najmniejszą częstotliwość przełączania, z jaką działa ten typ czujnika.
Powyższe pomiary przeprowadzić dla różnych parametrów określających częstotliwość próbkowania i dla
różnych nastaw stanowiska w liczbie podanej wedle zaleceń prowadzącego.
Sprawozdanie
Sprawozdanie powinno odzwierciedlać przebieg ćwiczenia, a w szczególności zawierać następujące
elementy:
- Wartości nastaw i obliczenia wykonywane w celu uzyskania wyników umieszczonych w arkuszu pomiarowym
-
Opis zastosowanych nastaw zegara układu odczytującego wejścia cyfrowe (wartości parametrów A i B,
częstotliwość próbkowania dla przeprowadzonych pomiarów)
-
Specyfikacja techniczna czujników użytych do detekcji ruchu
-
Analityczne wyznaczenie prędkości poruszającego się wahadła i kulki
- Długość strefy działania czujnika optycznego
-
Dyskusja wyników i wnioski dotyczące skuteczności detekcji przemieszczających się przedmiotów
LITERATURA:
L.Olejnik "Nadzorowanie zautomatyzowanych procesów ..." WPW1997. str.: 24-25, 123-128
7
Wyszukiwarka
Podobne podstrony:
BIOFIZYCZNE MONITOROWANIE CIAZY Nieznany (2)
3 Spoleczne teorie przestrzeni Nieznany
7 Przestrzen spoleczna Przestr Nieznany (2)
Przewidywanie budowy przestrzen Nieznany
Panstwowy Monitoring Srodowiska Nieznany
Excel Lekcja 5 tabele przestawn Nieznany (2)
o zagospodarowaniu przestrzenny Nieznany
8 Psychologia sprawcow przeste Nieznany (2)
mechanika 1 sem pk wil przestrz Nieznany
Opisujac relacje przestrzenne s Nieznany
02 Wizualizacja danych przestrz Nieznany
Metodyka monitoringu terenowego Nieznany
2010 02 Monitorowanie pojemnosc Nieznany (2)
8 Spoleczne wytwarzanie przest Nieznany (2)
Podstawy monitorowania jakosci Nieznany
Excel Lekcja 5 tabele przestawn Nieznany
przeciwdzialanie przestepczosci Nieznany
2 Spoleczne teorie przestrzeni Nieznany
przestrajanietuneracs200t3015t8 Nieznany
więcej podobnych podstron