
ZAKŁAD STATYKI I BEZPIECZE
Ń
STWA BUDOWLI
INSTYTUT IN
Ż
YNIERII L
Ą
DOWEJ
POLITECHNIKA WROCŁAWSKA
© 2000 dr in
ż
. Stanisław BIERNAT
sbi@i14odt.iil.pwr.wroc.pl
KONSTRUKCJA ZAŁAMANA
W PLANIE - METODA SIŁ
S
S
P
P
I
I
S
S
T
T
R
R
E
E
Ś
Ś
C
C
I
I
1.
PRZYJ
ĘCIE UKŁADÓW WSPÓŁRZĘDNYCH
.............................................................................. 2
2.
OBLICZENIE STOPNIA STATYCZNEJ NIEWYZNACZALNO
ŚCI
I DOBRANIE UKŁADU
PODSTAWOWEGO METODY SIŁ
........................................................................................................... 3
3.
BUDOWA UKŁADU RÓWNA
Ń METODY SIŁ
.............................................................................. 4
3.1 Posta
ć ogólna układu równań metody sił ................................................................... 4
3.2 Obliczenie współczynników układu równa
ń............................................................... 4
4.
OBLICZENIE RZECZYWISTYCH SIŁ PRZEKROJOWYCH
...................................................... 9
5.
ROZWI
ĄZANIE RUSZTU Z WYKORZYSTANIEM PROGRAMU STRAINS
........................... 10
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 2
ZADANIE:
Stosuj
ąc metodę sił rozwiązać konstrukcję załamaną w planie o schemacie i
obci
ążeniu jak na rysunku.
P=12 kN
q=4 kN/m. M=24 kNm
k=8 EI
y
/m
3
GI
x
=0.5EI
y
k
q
P
M
4 m
4 m
3 m
3 m
3 m
2 m
1EI
1EI
1EI
2EI
1.
PRZYJ
ĘCIE UKŁADÓW WSPÓŁRZĘDNYCH
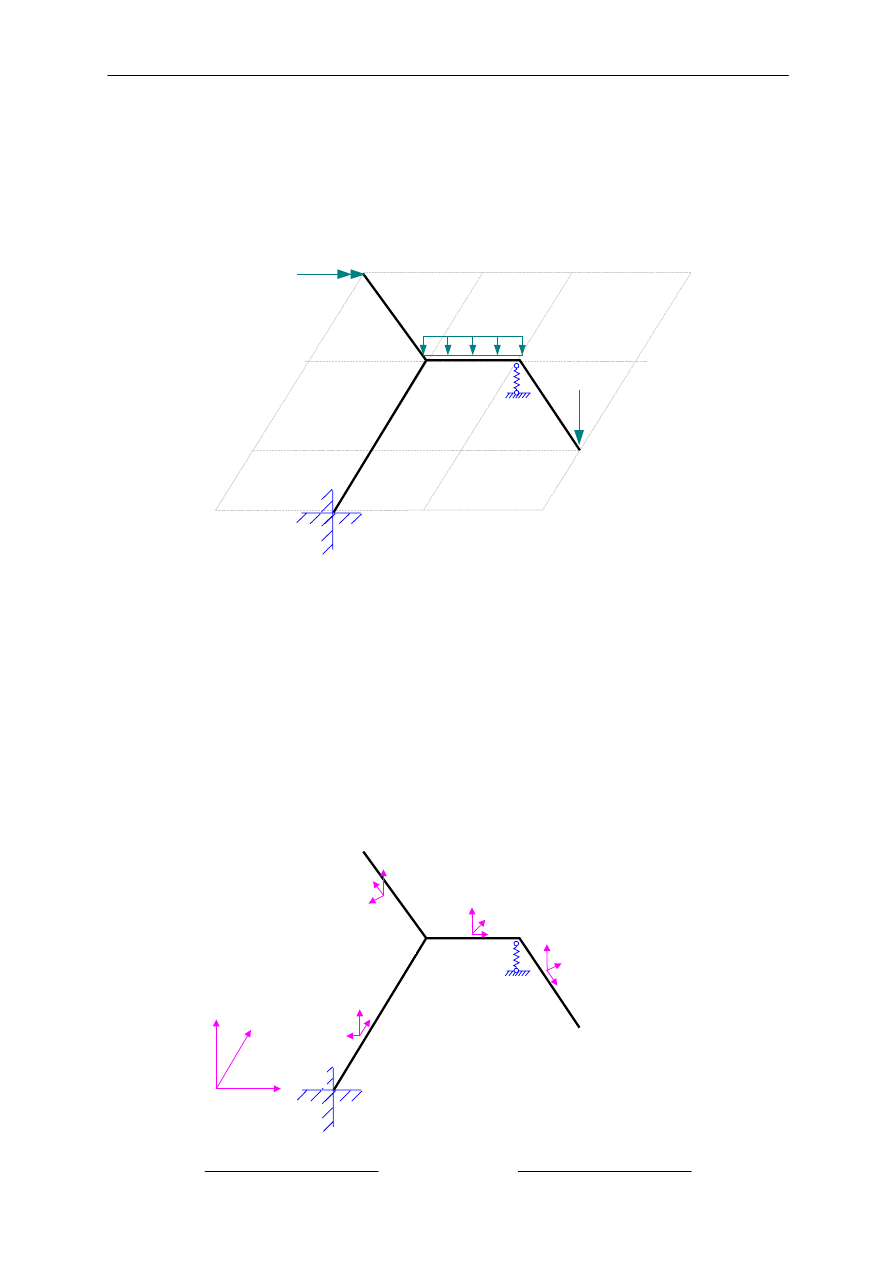
Przy rozwi
ązywaniu przestrzennych układów konstrukcyjnych niezbędne jest przyjęcie
globalnego układu współrz
ędnych dla całego układu (przyjęto prawoskrętny układ osi XYZ
tak jak w programie STRAINS - o
ś Z do góry) oraz lokalnych układów współrzędnych dla
poszczególnych elementów (pr
ętów). Przyjmujemy prawoskrętne układy współrzędnych z osią
lokaln
ą x będącą osią pręta oraz z osią z do góry (tak jak STRAINS), lokalne układy
współrz
ędnych jak i numerację węzłów pokazano na rysunku poniżej.
UWAGA - chc
ąc uzyskać te same układy współrzędnych lokalnych w STRAINS trzeba podawać dla prętów
odpowiednio w
ęzły początkowy i końcowy - wyznaczające kierunek przyjętej dla pręta osi lokalnej
x (pr
ęty : 1-2, 1-B, B-3, A-1)
k
A
B
1
2
3
X
Y
Z
x
y
z
x
y
z
x
y
z
x
y
z
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 3
2. OBLICZENIE STOPNIA STATYCZNEJ NIEWYZNACZALNO
ŚCI
I DOBRANIE UKŁADU PODSTAWOWEGO METODY SIŁ
Konstrukcje załamane w planie (wszystkie pr
ęty leżą w jednej płaszczyźnie) poddane działaniu
obci
ążeń pionowych lub wektorów momentów leżących w płaszczyźnie konstrukcji są
szczególnym przypadkiem konstrukcji przestrzennych. Z sze
ściu sił występujących w układach
przestrzennych sił przekrojowych (N
x
, T
y
, T
z
, M
x
, M
y
, M
z
) niezerowe siły wewn
ętrzne to (T
z
,
M
x
, M
y
). Stopie
ń statycznej niewyznaczalności w takich układach liczymy podobnie jak dla
płaskich układów pr
ętowych ze wzoru:
t
e
n
h
⋅
−
=
3
,
gdzie e jest liczb
ą więzi elementarnych , a t jest liczbą tarcz układu.
Liczba tarcz w układzie t=1, oraz e=4 wi
ęzi elementarne.
1
1
3
4
3
=
⋅
−
=
⋅
−
=
t
e
n
h
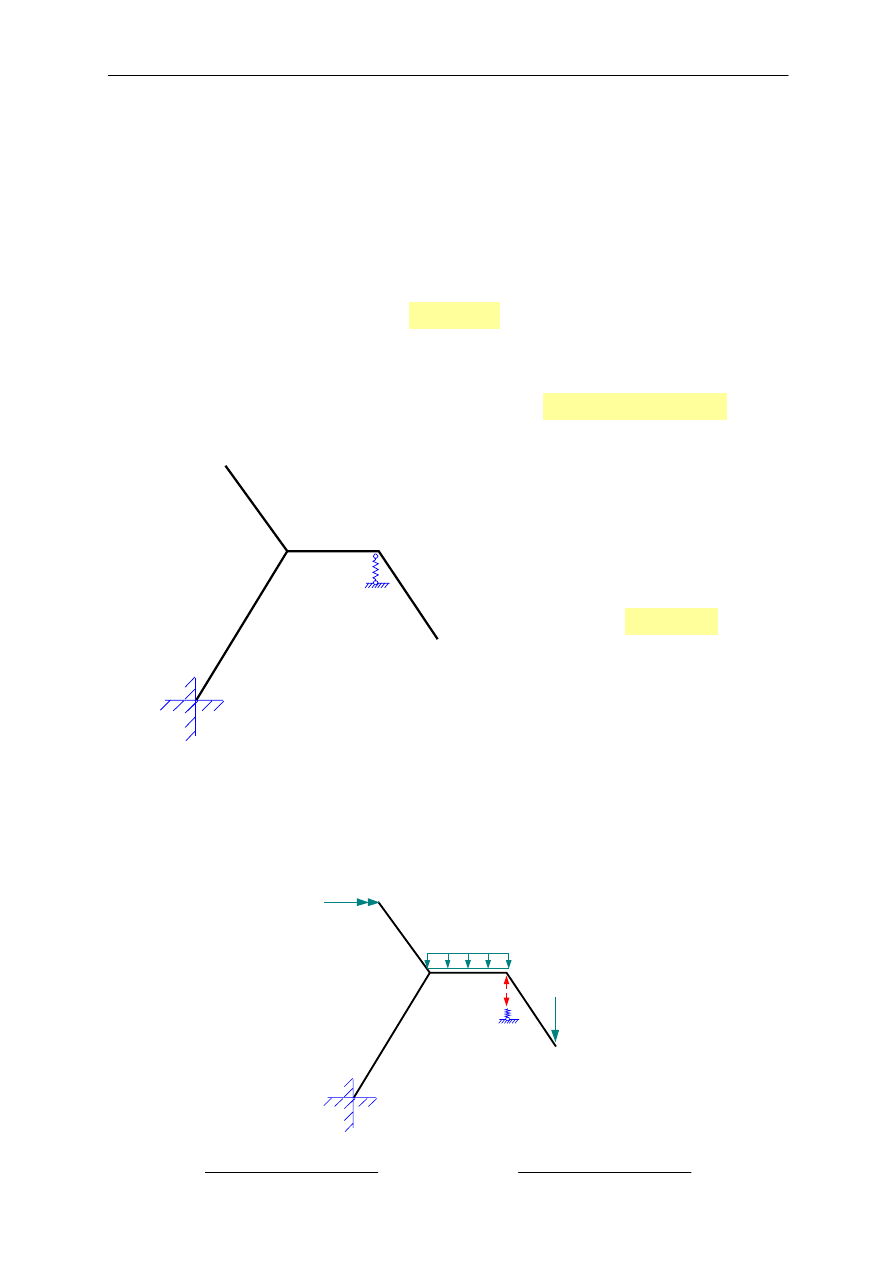
A wi
ęc
układ jest jednokrotnie statycznie niewyznaczalny. Na rysunku poni
żej zaznaczono więzi
elementarne.
k
e=3
e=1
Na podporze A wyst
ępują trzy więzi
(pomijamy wi
ęzi w których siły są z
zało
żenia zerowe Ty, Nx, Mz) oraz w
punkcie
B
wyst
ępuje jedna więź
pionowa (spr
ężysta).
UWAGA - rozpatruj
ąc zadanie jako pełny
układ przestrzenny
t
e
n
h
⋅
−
=
6
i wtedy na
podporze A wyst
ępuje komplet e=6 więzi oraz
na podporze B wyst
ępuje e=1 więź pionowa.
A wi
ęc także n
h
=1
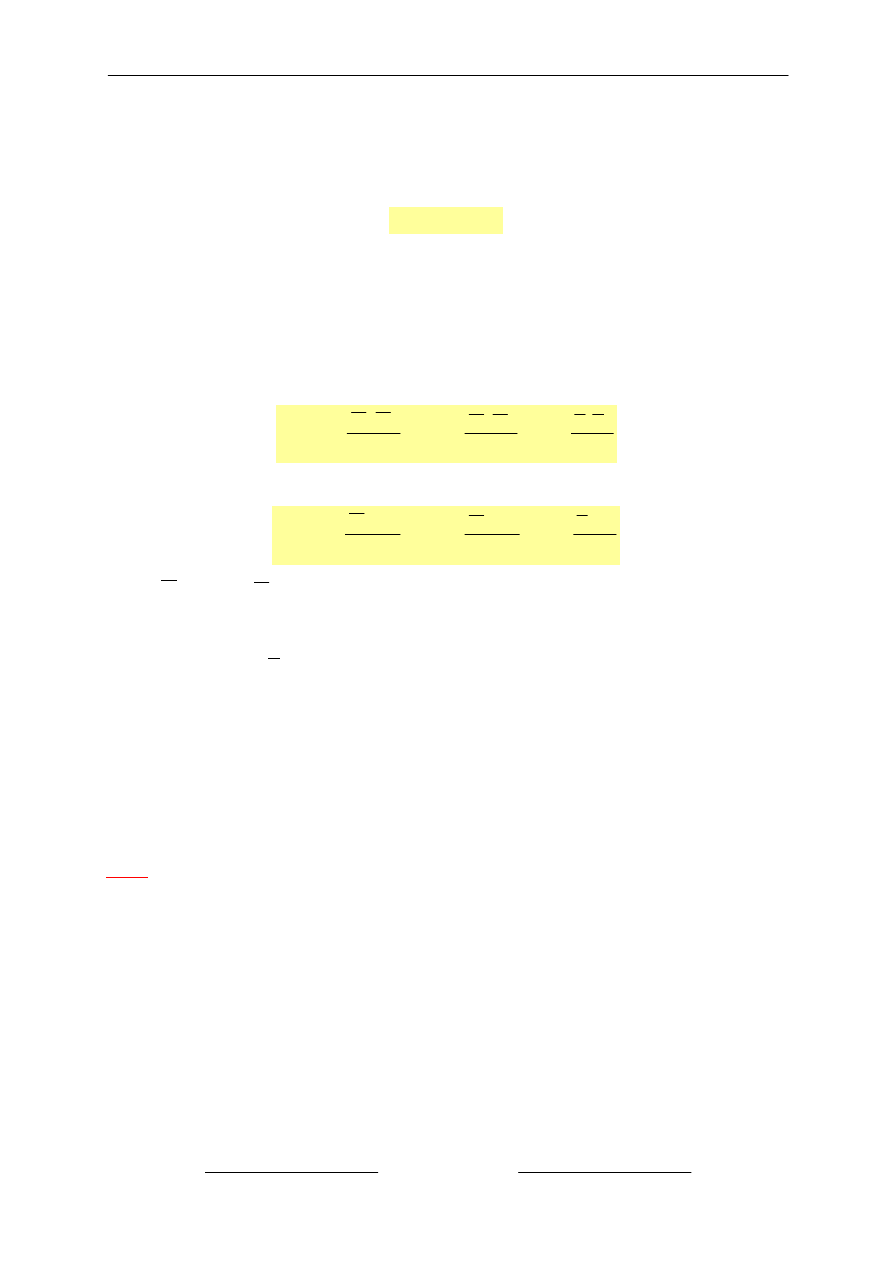
Układ podstawowy metody sił pokazany na rysunku poni
żej przyjęto rozcinając więź sprężystą
w punkcie B - uwidoczniono nadliczbow
ą niewiadomą metody sił X
1
. Taki układ podstawowy
jest w tym zadaniu wygodny, gdy
ż do określenia sił wewnętrznych na wszystkich czterech
pr
ętach nie potrzebujemy wartości reakcji podporowych w punkcie A.
k
q
P
M
X
1
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 4
3. BUDOWA UKŁADU RÓWNA
Ń METODY SIŁ
3.1 Posta
ć ogólna układu równań metody sił
Poniewa
ż w zadaniu n
h
=1 układ równa
ń redukuje się do jednego równania :
0
1
1
11
=
∆
+
F
X
δ
3.2 Obliczenie współczynników układu równa
ń
Współczynniki przy niewiadomych układu równa
ń obliczymy ze wzoru Maxwella-Mohra
(uwzgl
ędniając wpływ momentów zginających M
y
,skr
ęcających M
x
oraz wi
ęzi sprężystych -
wpływ sił tn
ących T
z
na rozwi
ązanie pomijamy gdyż w belkach smukłych jest on niewielki)
å
åò
åò
+
+
=
n
n
j
n
i
n
p
x
j
x
i
x
p
y
j
y
i
y
ij
k
R
R
ds
GI
M
M
ds
EI
M
M
δ
wyrazy wolne od obci
ążeń siłami ze wzoru
å
åò
åò
+
+
=
∆
n
n
F
n
i
n
p
x
F
x
i
x
p
y
F
y
i
y
F
i
k
R
R
ds
GI
M
M
ds
EI
M
M
gdzie
F
y
i
y
M
M ,
,
F
x
i
x
M
M ,
s
ą odpowiednio momentami zginającymi i skręcającymi w
układzie podstawowym wywołanymi odpowiednio siłami hiperstatycznymi
1
=
i
X
oraz
obci
ążeniem danym,
F
n
i
n
R
R ,
s
ą siłami w n-tej więzi sprężystej wywołanymi odpowiednio
siłami hiperstatycznymi
1
=
i
X
oraz obci
ążeniem danym,
n
k
jest sztywno
ścią n-tej więzi
spr
ężystej.
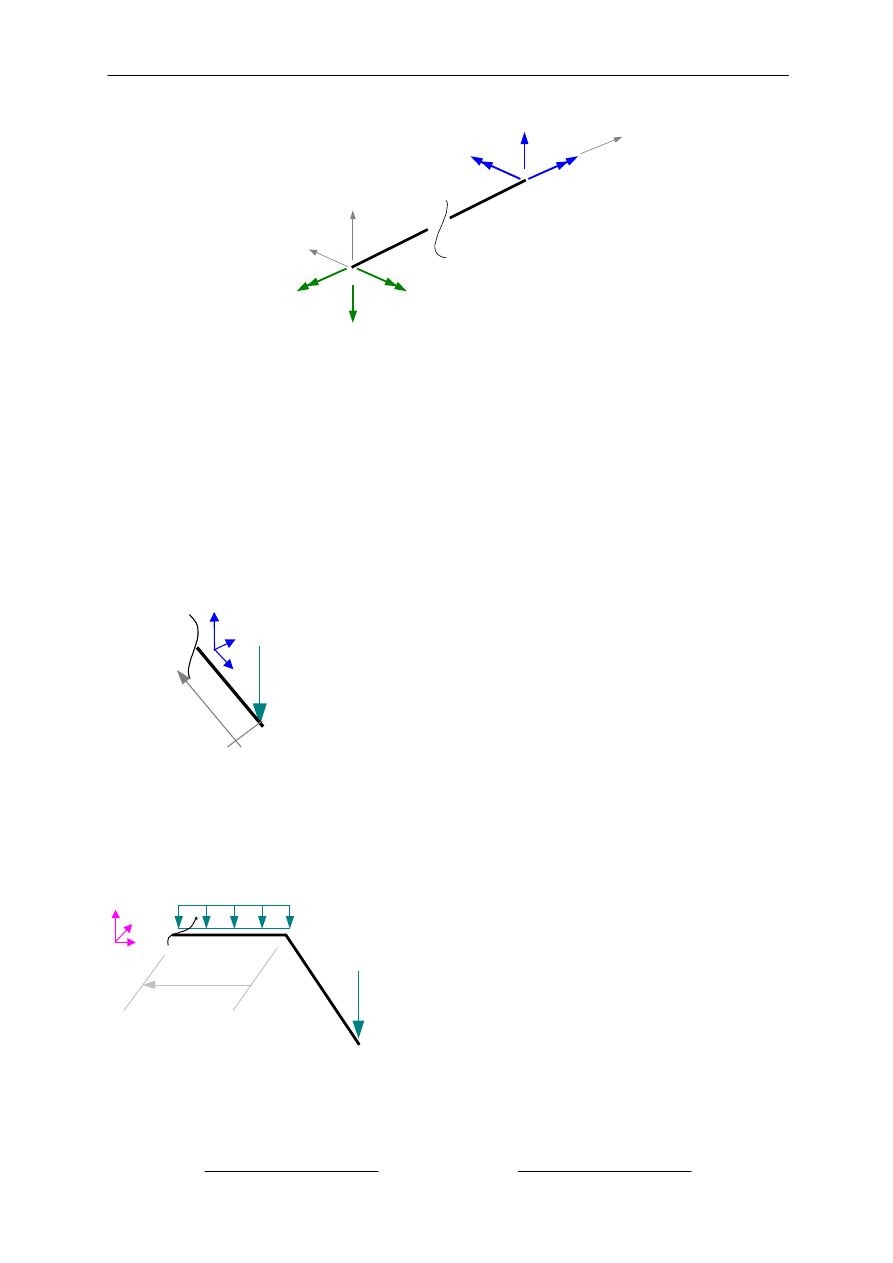
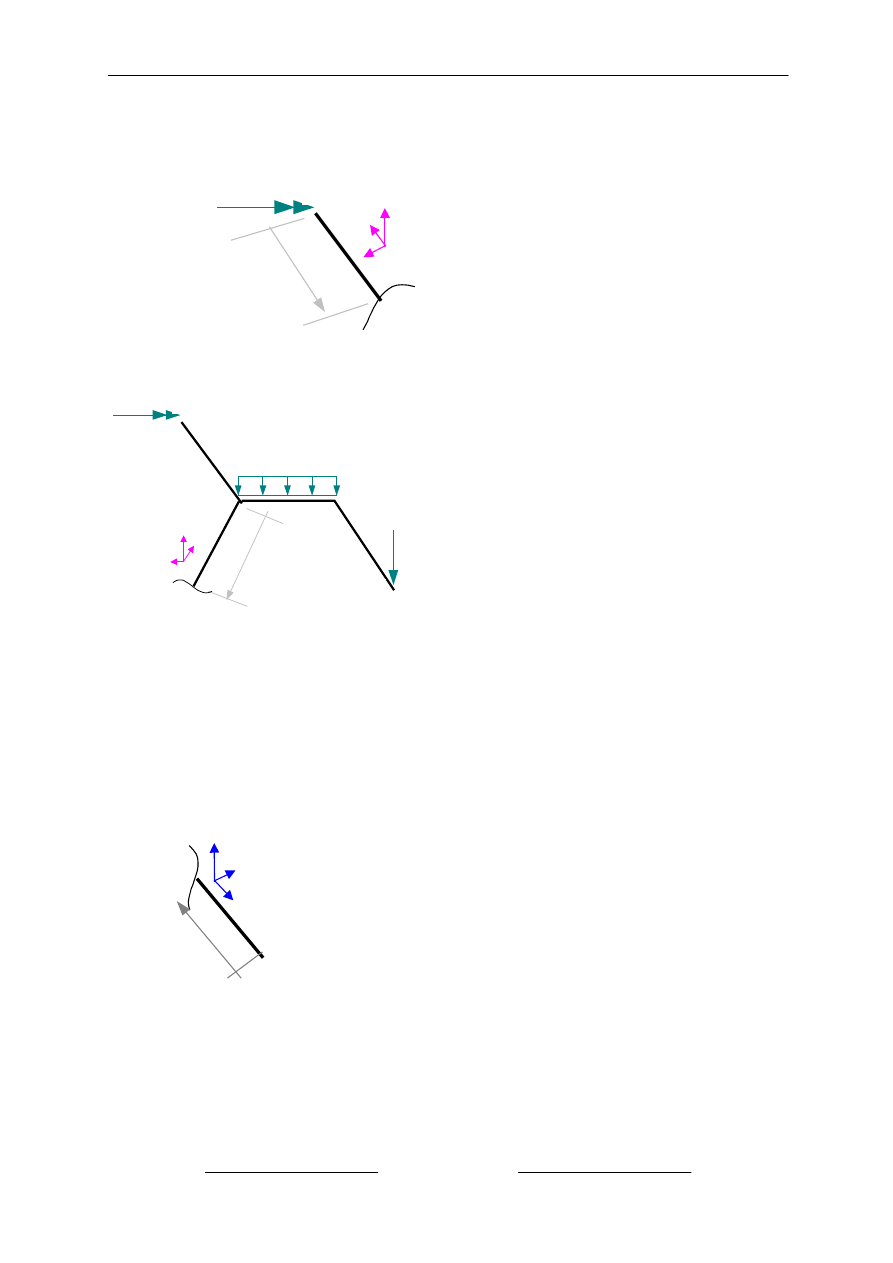
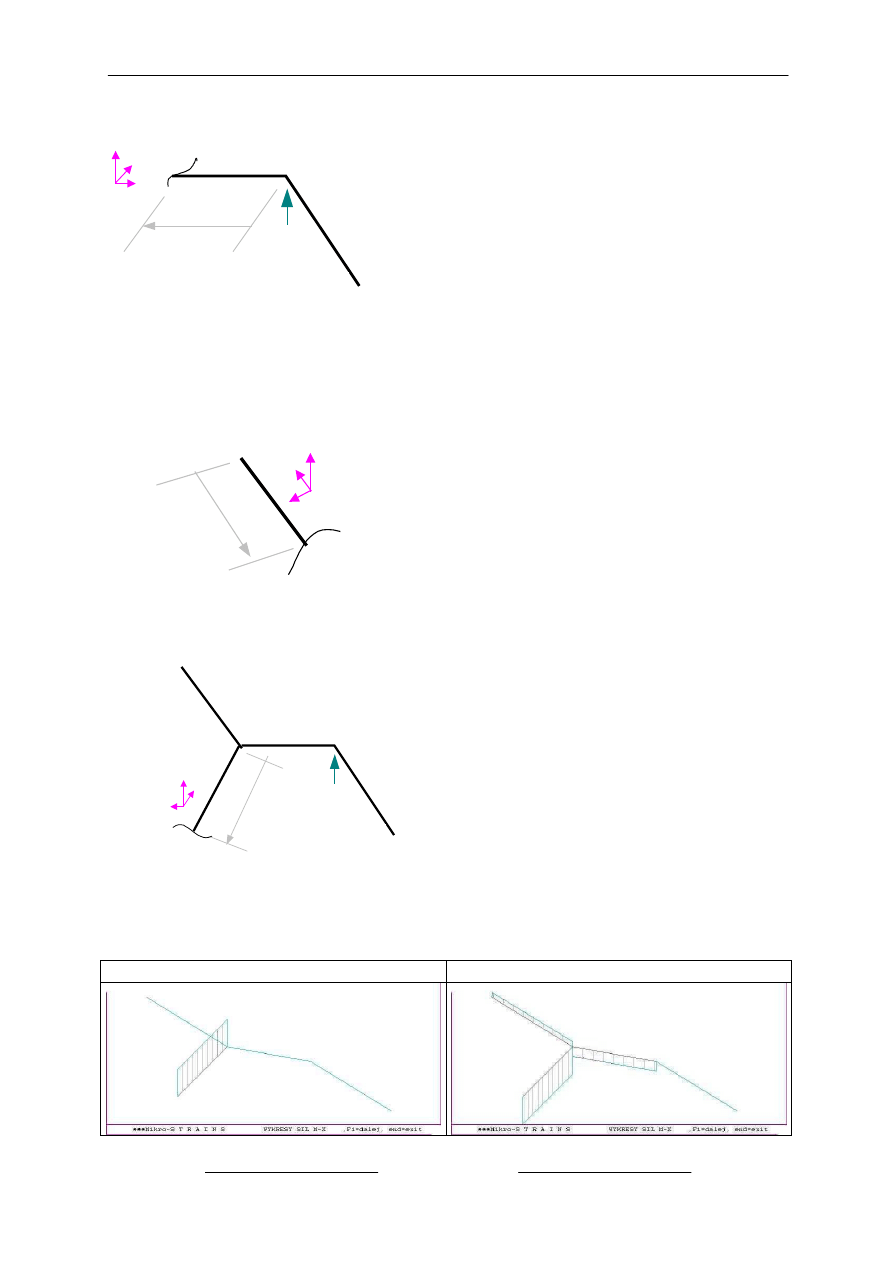
3.2.1 Definicja znakowania sił przekrojowych.
Uwaga: Momenty zginaj
ące odkładamy zawsze po stronie włókien rozciąganych, znaki wynikają z przyjętych
lokalnych układów współrz
ędnych, a definicja znakowania jest pokazana na rysunku i jest następująca : jeśli w
przyj
ętym lokalnym układzie osi :
równowa
żymy obciążenia po stronie związanej z początkiem p pręta to
dodatnie siły przekrojowe maj
ą zwroty przeciwne do osi
równowa
żymy obciążenia po stronie związanej z końcem k pręta to
dodatnie siły przekrojowe maj
ą zwroty zgodne z osiami.
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 5
x
z
y
p
k
T
z
T
z
M
y
M
y
M
x
M
x
Wniosek - dobrze tak ustali
ć zwroty osi lokalnych x w obliczeniach ręcznych, żeby zawsze
korzysta
ć z
definicji drugiej
(tak te
ż uczyniono w tym zadaniu).
3.2.2
Rozwi
ązanie układu podstawowego od obciążenia zewnętrznego.
Na pr
ętach kolejno sporządzamy wykresy sił przekrojowych :
−
=
3-B
("od ko
ńca" -
definicja druga -
a wi
ęc osie lokalne wyznaczają dodatnie zwroty sił)
P
3
Mx
My
Tz
x
5
0
≤
≤
x
M
y
(x)= + Px
=
0 ... 60 kNm
(rozci
ąga włókna górne)
M
x
(x)= 0
T
z
(x)= -P = -12 kN = const
−
=
B-1
("od ko
ńca" -
definicja druga -
a wi
ęc osie lokalne wyznaczają dodatnie zwroty sił)
q
P
B
3
x
2
Mx
My
Tz
3
0
2
≤
≤
x
M
y
(x
2
)= + P(4+x
2
)+0.5qx
2
2
=
= 48
.... 70.5 .... 102 kNm
(rozci
ąga włókna górne)
M
x
(x
2
)= +P*3 = 36 kNm
T
z
(x
2
)= -P - qx
2
= -12 ... -24 kN
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 6
−
=
2-1
("od ko
ńca" -
definicja druga
)
M
2
x
4
Mx
My
Tz
5
0
4
≤
≤
x
M
y
(x
4
)= -0.6 M = -14.4 kNm
(rozci
ąga włókna dolne)
M
x
(x
4
)= -0.8 M. = -19.2 kNm
T
z
(x
4
)= 0
−
=
1-A
(od ko
ńca -
definicja druga
)
q
P
M
B
1
2
3
Mx
My
Tz
x
5
5
0
5
≤
≤
x
M
y
(x
5
) = -M. + 3q x
5
- P(3-x
3
) =
= -60 ... 60 kNm
(dla x
5
=0 rozci
ąga włókna dolne)
M
x
(x
5
)= +3q * 1.5 + 7P = 102 kNm
T
z
(x
5
)= -P - 3q = -24 kN
3.2.3
Rozwi
ązanie układu podstawowego od obciążenia nadliczbową X
1
.
Na pr
ętach kolejno sporządzamy wykresy sił przekrojowych :
−
=
3-B
("od ko
ńca" -
definicja druga -
a wi
ęc osie lokalne wyznaczają dodatnie zwroty sił)
3
Mx
My
Tz
x
Brak obci
ążeń po prawej stronie przekroju stąd
5
0
≤
≤
x
M
y
1
(x)= 0
M
x
1
(x)= 0
T
z
1
(x)= 0
−
=
B-1
("od ko
ńca" -
definicja druga -
a wi
ęc osie lokalne wyznaczają dodatnie zwroty sił)
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 7
X
1
B
3
x
2
Mx
My
Tz
3
0
2
≤
≤
x
M
y
1
(x
2
)= - 1 x
2
(rozci
ąga włókna dolne)
M
x
1
(x
2
)= 0 = const
T
z
1
(x
2
)= +1 = const
−
=
2-1
("od ko
ńca" -
definicja druga
)
2
x
4
Mx
My
Tz
Brak obci
ążeń po lewej stronie przekroju stąd
5
0
4
≤
≤
x
M
y
1
(x
4
)= 0
M
x
1
(x
4
)= 0
T
z
1
(x
4
)= 0
−
=
1-A
(od ko
ńca -
definicja druga
)
B
1
2
3
Mx
My
Tz
x
5
X
1
5
0
5
≤
≤
x
M
y
1
(x
5
)= -1 x
5
(rozci
ąga włókna dolne)
M
x
1
(x
5
)= -3
T
z
1
(x
5
)= +1
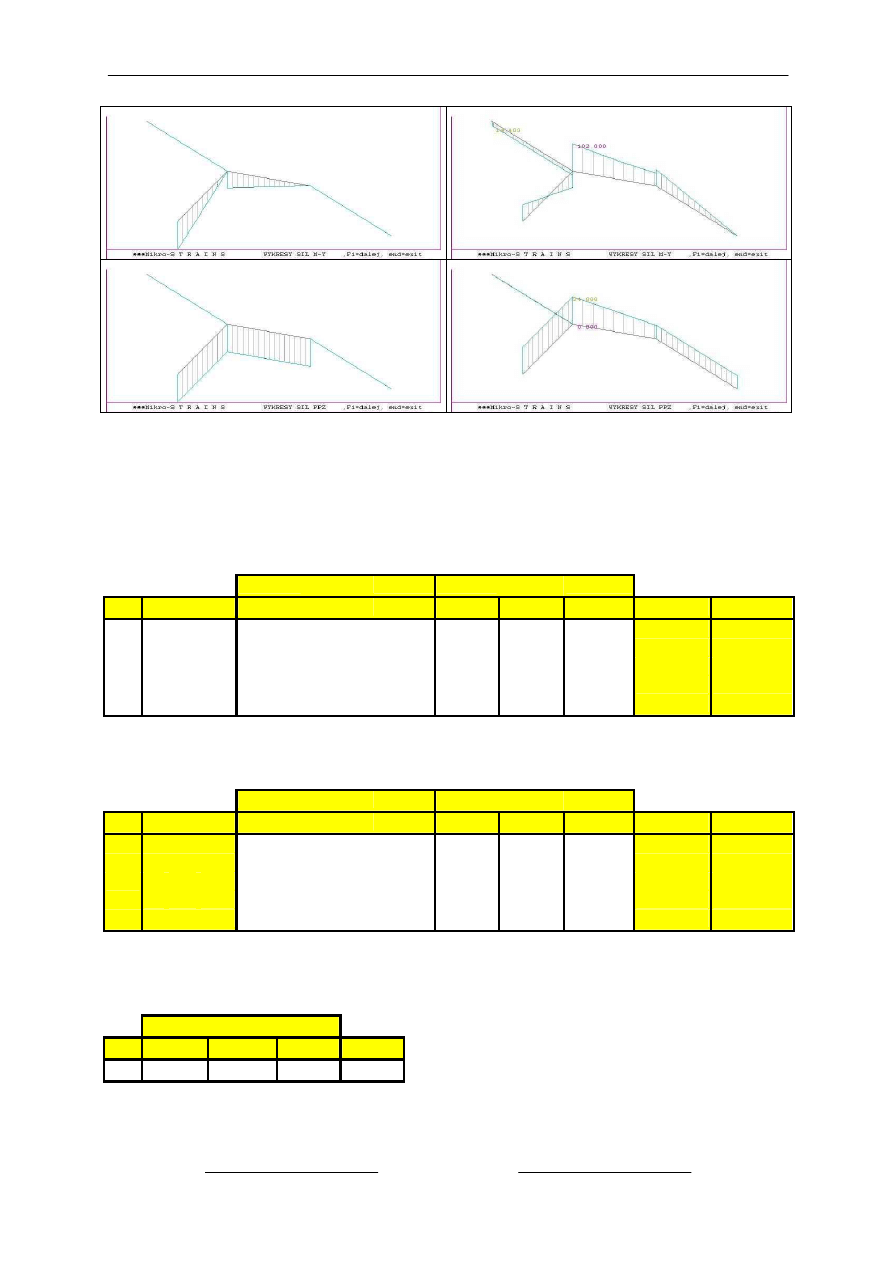
Wykresy momentów momentów skr
ęcających Mx, zginających My, i sił tnących Tz, uzyskane
z programu STRAINS przedstawiono na rysunku poni
żej dla obu stanów obciążenia :
stan X1 =1
stan obci
ążenia
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 8
3.2.4 Obliczenie współczynników macierzy podatno
ści i wyrazów wolnych
W tym przykładzie skorzystamy ze wzoru uproszczonego całkowania Simpsona i wzoru
Maxwella-Mohra automatyzuj
ąc obliczenia za pomocą tabeli z programu EXCEL
- uwzgl
ędnienie odkształcalności giętnej
My1
My0
ij
L
EI
GJ
a
b
c
A
B
C
d11
d10
A1
5
1
0,5
-5
-2,5
0
60
0
-60
41,667
-250
1B
3
2
1
-3
-1,5
0
102
70,5
48
4,500
-182,25
B3
5
1
0,5
0
0
0
60
30
0
0,000
0
12
5
1
0,5
0
0
0
-14,4
-14,4
-14,4
0,000
0
suma
46,167
-432,250
- uwzgl
ędnienie odkształcalności skrętnej
Mx1
Mx0
ij
L
EI
GJ
a
b
c
A
B
B
d11
d10
A1
5
1
0,5
-3
-3
-3
102
102
102
90,000
-3060
1B
3
2
1
0
0
0
36
36
36
0,000
0
B3
5
1
0,5
0
0
0
0
0
0
0,000
0
12
5
1
0,5
0
0
0
-19,2
-19,2
-19,2
0,000
0
90,000
-3060,0
- uwzgl
ędnienie sprężystości podpory B
Reakcja w spr
ęż
ynie
k
∆
R1
R0
d11
d10
8
1
0
0,125
0
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 9
å
åò
åò
+
+
=
n
n
j
n
i
n
p
s
j
x
i
x
p
y
j
y
i
y
ij
k
R
R
ds
GI
M
M
ds
EI
M
M
δ
= 1/EI (46.167 + 90 + 0.125 ) =
136.292/EI
å
åò
åò
+
+
=
∆
n
n
F
n
i
n
p
s
F
x
i
x
p
y
F
y
i
y
F
i
k
R
R
ds
GI
M
M
ds
EI
M
M
= 1/EI (-432.25 - 3060 + 0 ) =
-3492.25/EI
3.2.5 Posta
ć szczegółowa równania metody sił
136,292
X1
-3492,250
= 0
X1 =
25,623 kN
4. OBLICZENIE RZECZYWISTYCH SIŁ PRZEKROJOWYCH
Rzeczywiste momenty zginaj
ące, momenty skręcające oraz siły tnące obliczymy wykorzystując
zasad
ę superpozycji. Pod spodem podano wartości sił na początku i na końcu pręta.
ij
My
Mx
Tz
A1
-68,117
-60,000
25,130
25,130
1,623
1,623
1B
25,130
32,065
48,000
36,000
36,000
1,623
13,623
B3
60,000
0,000
0,000
0,000
-12,000
-12,000
12
-14,400
-14,400
-19,200
-19,200
0,000
0,000
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 10
5. ROZWI
ĄZANIE RUSZTU Z WYKORZYSTANIEM PROGRAMU STRAINS
W ramach laboratorium wszystkie dane do programu zostan
ą przygotowane w pliku
tekstowym przy u
życiu języka problemowo zorientowanego, którego interpreter jest częścią
składow
ą systemu STRAINS. Plik użytkownika składa się z rozkazów, w których wyróżnić
mo
żna nazwę rozkazu, a po niej ewentualne parametry. Wszystkie rozkazy mogą być użyte w
formie pełnej lub skróconej. Wydruk pod spodem prezentuje obie formy; tzn. np. zamiennie do
słowa inicjuj
ącego START można użyć słowa ST - co zostało zaakcentowane dużymi literami
- STart, nie oznacza to rozró
żniania małych i dużych liter przez program. Wszystkie rozkazy w
wydruku zaprezentowano w tej konwencji i od u
żytkownika zależy czy chce stosować notację
pełn
ą czy skróconą. Omówienie pełnej składni jest w tym miejscu niecelowe i odsyłam
zainteresowanych do instrukcji STRAINSa, a na podstawie przykładu i kilku komentarzy po
prawej stronie wszystkie dane mo
żna przygotować poprzez analogię.
Uwaga: W systemie STRAINS po znaku
średnika umieszcza się komentarze, co jest wygodne do czasowego
wył
ączania niektórych linii - tak jak zrobiono to poniżej.
Poni
żej zamieszczono wydruk zbioru danych dla powyższego przykładu, który należy dla
własnego zadania przygotowa
ć za pomocą dowolnego edytora tekstowego (np. NOTATNIK
w Windows).
STart 'KONSTRUKCJA ZALAMANA W PLANIE '
TYP RaMaPrzestrzenna
Wezly 5
ELementy 4
WSPolrzedne
1 4 0 0
2 4 5 0
3 7 5 0
4 11 2 0
5 0 8 0
TOPologia
1 1 2
2 2 3
3 3 4
4 2 5
WezlyPosrednie 1 2
Materialy
E V A IZ BETA WSZystkie 1 0.3 100000 1 0
IX IY 2 WarTosci 2.6 2 PoZostale 1.3 1
PoDPory
1 ZamocowaNY
3 ZamocowanySPrezyscie z 8
OPisOBciazenia 'zewnetrzne'
WeZlowe 4 z -12
PRostokatne 2 z -4
MomenT 4 x 24 WZGledne 1
;OPisOBciazenia 'wirtualne'
;WZ 3 z 1
WYNiki
OBLicz
STop
liczba w
ę
złów
liczba elementów
WP ilo
ść
pr
ę
t
ZNY = we wszystkich kier.
ZSP kierunek sztywno
ść
WZ w
ę
zeł kierunek warto
ść
PR pr
ę
t kierunek warto
ść
MT pr
ę
t kierunek warto
ść
wzgl
ę
dne poło
ż
enie
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 11
Szerszego komentarza wymaga blok "Materialy". W zadaniu mamy zdefiniowan
ą zależność
α
=
S
Y
GI
EI
,
gdzie
α
=2. Korzystaj
ąc z zależności
)
1
(
2
ν
+
=
G
E
dostajemy :
α
ν
=
+
S
Y
I
I
)
1
(
2
czyli
α
ν
Y
S
I
I
)
1
(
2
+
=
a wi
ęc przyjmując jakąś wartość
ν
(0.3 w zadaniu) oraz znaj
ąc
α
i I
y
da si
ę policzyć I
S
.
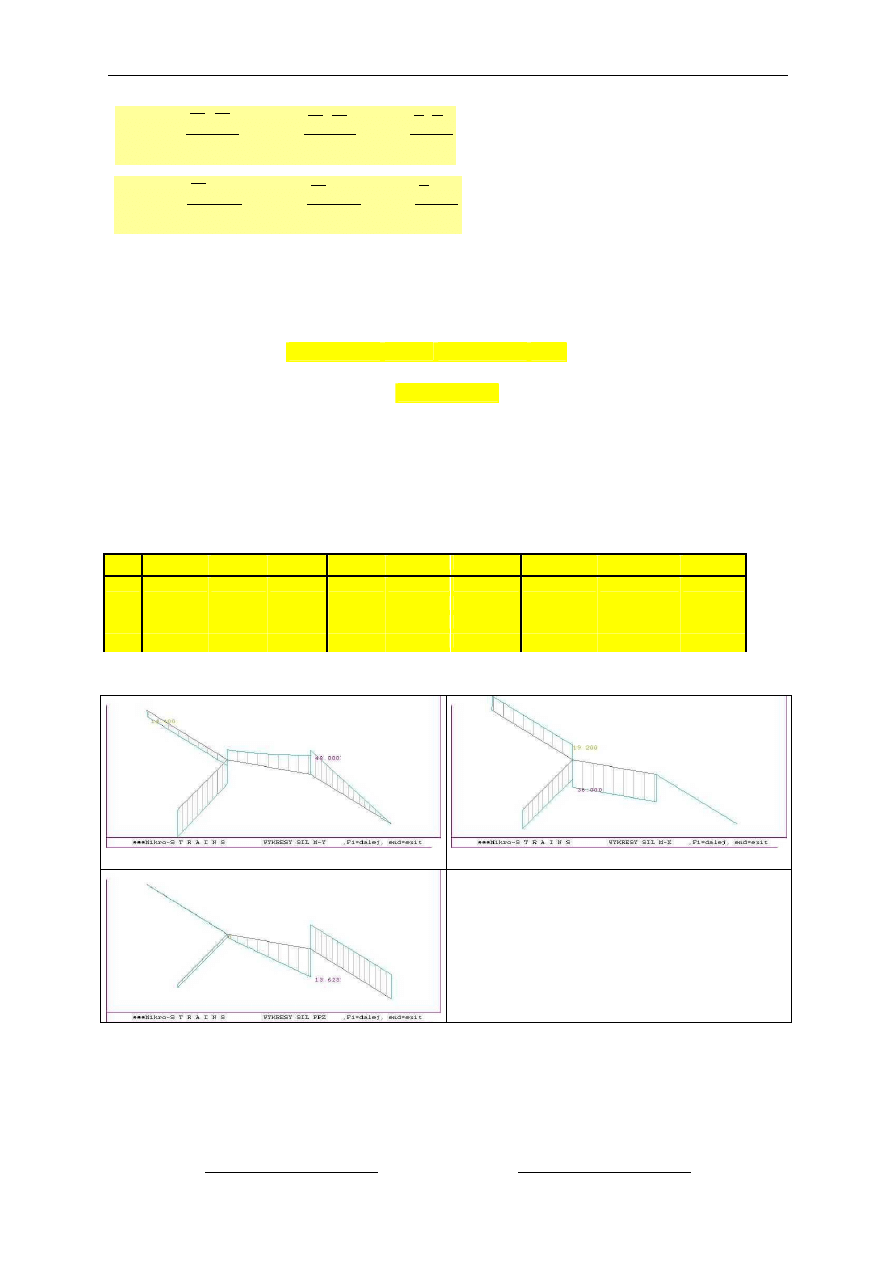
Pod spodem zamieszczono wyselekcjonowane wyniki dla zadania (rzeczywiste warto
ści
przemieszcze
ń, sił przekrojowych i reakcji).
UWAGA !!! W systemie STRAINS stosowana jest odwrotna do stosowanej na wykładzie i
ćwiczeniach umowa
znakowania sił przekrojowych, co oznacza
że wszystkie siły przekrojowe z pliku wynikowego powinny mieć
przeciwne znaki do sił wyznaczanych "r
ęcznie".
Na czerwono zaznaczono reakcj
ę w podporze sprężystej - wartość niewiadomej X
1
metody sił.
Podobnie dla wyników z układu podstawowego da si
ę odczytać wartości wyrazów równania
kanonicznego metody sił korzystaj
ąc z definicji, a więc jako przemieszczenia na odpowiednim
kierunku od odpowiednich zestawów obci
ążeń.
Pełny model przestrzenny zastosowany w zadaniu potwierdza :
-
zerowe przemieszczenia w płaszczy
źnie konstrukcji UX UY
-
zerowe obroty w płaszczy
źnie konstrukcji FIZ
-
zerowe siły osiowe (podłu
żne) PX
-
zerowe siły tn
ące (poprzeczne) PY
-
zerowe momenty działaj
ące w płaszczyźnie konstrukcji MZ
-
poprawno
ść wykresów sporządzonych ręcznie
5. WYNIKI PRZEMIESZCZENIA
WEZEL NR
UX
UY
UZ
FIX
FIY
FIZ
1
.00000
.00000
.00000
.00000
.00000
.00000
2
.00000
.00000
817.63987
320.29200
251.29930
.00000
3
.00000
.00000
-3.20292
428.29200
301.64680
.00000
4
.00000
.00000
-2994.66581
518.29200
421.64680
.00000
5
.00000
.00000
2963.71295
517.09200
193.69930
.00000
SILY I MOMENTY
PRET NR
WEZEL
SILA PODL.PX
SILA POPRZ.PY
SILA POPRZ.PZ
MOMENT SKR.MX
MOM. ZGIN.MY
MOM. ZGIN.MZ
1
1
.0000
.00000
-1.62336
-25.12993
68.11678
.00000
2
.0000
.00000
-1.62336
-25.12993
60.00000
.00000
2
2
.0000
.00000
-1.62336
-36.00000
-25.12993
.00000
.500
.0000
.00000
-7.62336
-36.00000
-32.06496
.00000
3
.0000
.00000
-13.62336
-36.00000
-48.00000
.00000
3
3
.0000
.00000
12.00000
.00000
-60.00000
.00000
4
.0000
.00000
12.00000
.00000
.00000
.00000
4
2
.0000
.00000
.00000
19.20000
14.40000
.00000
5
.0000
.00000
.00000
.00000
.00000
.00000
REAKCJE
WEZEL NR
X
Y
Z
XY
XZ
YZ
1
.00000
.00000
-1.62336
.00000
-25.12993
-68.11678
3
25.62336
KONTROLA ROWNOWAGI
KIERUNEK
OBCIAZENIA
REAKCJE
X
.00000
.00000
Y
.00000
.00000
Z
-24.00000
24.00000
YZ
-60.00000
60.00000
XZ
198.00000
-198.00000
XY
.00000
.00000
KONIEC OBLICZEN
WBLiW statyka sem. V
Konstrukcja załamana w planie – metoda sił – przykład
strona 12
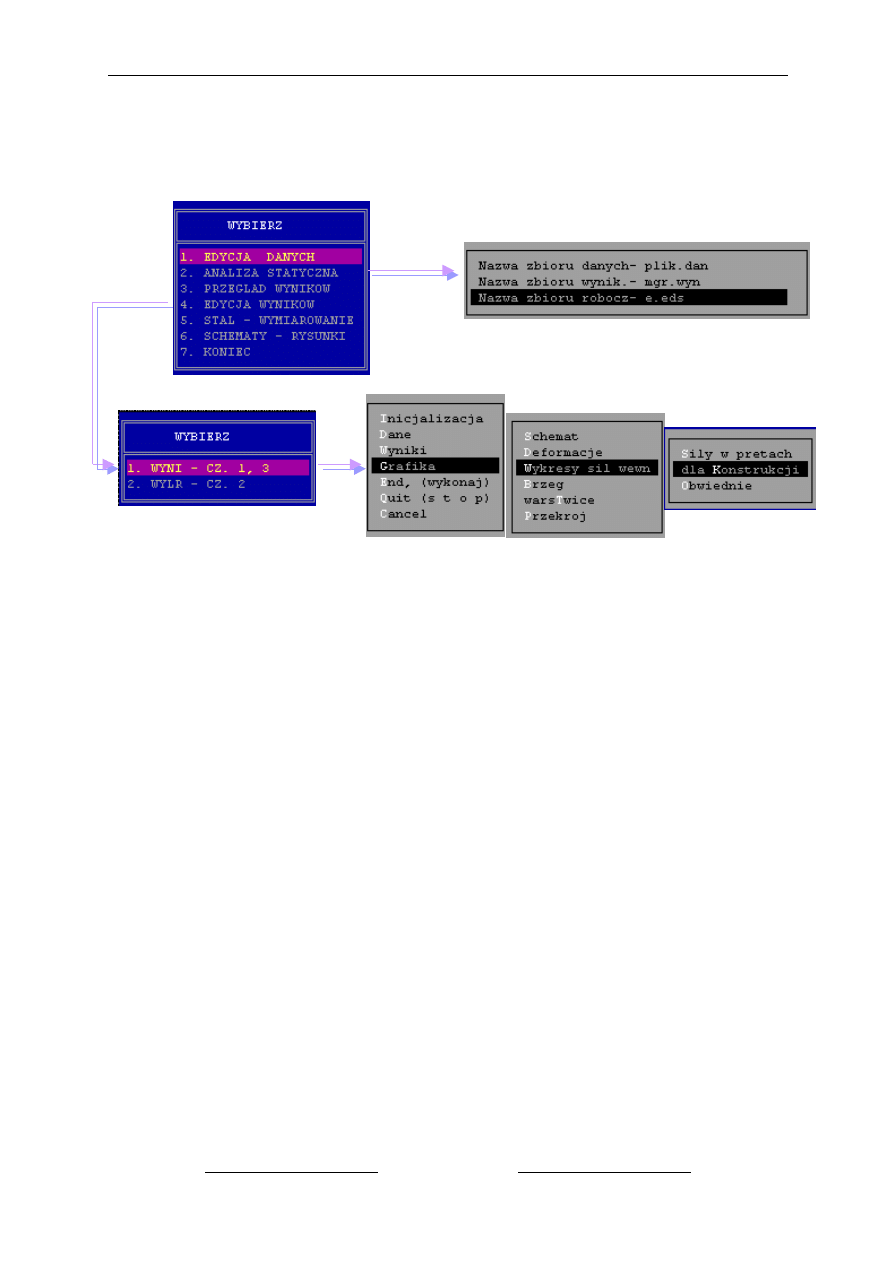
Z przygotowanym w ramach laboratorium zbiorem tekstowym w programie STRAINS
korzystamy z nast
ępującej ścieżki MENU
Bardziej szczegółowy opis edycji wyników w ramach laboratorium.
Wyszukiwarka
Podobne podstrony:
metoda sil 2 id 294543 Nieznany
Metoda PEST id 294420 Nieznany
Metoda Eurela id 294267 Nieznany
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
metoda sił pale Model
metoda grupowa id 294297 Nieznany
Metoda Sil 2
Mechanika budowli Metoda sił belka
Projekt I Rama Metoda Sił
Wyznaczanie współczynnika załamania światła metodą najmniejszego odchylenia w pryzmacie sprawkox
Współczynnik załamania szkła, Ć 73B moje, Wyznacznie współczynnika załamania szkła metodą kąta najmn
Metoda sił rama8
Metoda sil cz 3 Płaskie ustroje prętowe obciążone w płaszczyźnie
02 opis metoda Lehmanna[1]id 3914
301 Wyznaczanie współczynnika załamania światła metodą najmniejszego odchylenia w pryzmacie
Obliczanie układów statycznie niewyznaczalnych metoda sił z wykorzystaniem symetrii i antysymetrii
Tabela osiowe metoda sił
więcej podobnych podstron