Mechanika teoretyczna
w 1
dr hab. inż. Włodzimierz Idczak,
konsultacje: ……………….
• wykłady - 30 godzin lekcyjnych
• ćwiczenia – 16 godzin lekcyjnych
• sylabus -e-dziekanat
• karta informacyjna przedmiotu - USOS
1
MT_SS - w 1
MT_SS - w 1
2
Literatura
Podstawowa
1. Jerzy Leyko – Mechanika ogólna, Statyka i kinematyka, tom 1,
PWN, Warszawa 2011
2. Ryszard Marian Janka – Podstawy mechaniki, Teoria i zagadnienia
metodyczne statyki, Uniwersytet Opolski, Opole 2007
3. Józef Giergiel, Mariusz Giergiel – Mechanika ogólna, Przykłady,
pytania i zadania, OW Politechniki Rzeszowskiej, Rzeszów 2009
4. Ludwik Janicki, Zdzisław Sawaniewicz – Poradnik, rozwiązywanie
zadań z mechaniki, cz. 1 – statyka, Wydawnictwo REA s.j.,
Warszawa 2006

MT_SS - w 1
3
Uzupełniająca
1. Edmund Wittbrodt, Stefan Saniak – Mechanika ogólna, teoria i
zadania, Wydawnictwo Politechniki Gdańskiej, Gdańsk 2010
2. Z. Dżygadło, S. Kaliski, L. Solarz, E. Włodarczyk – Drgania i Fale,
Część I, Drgania układów dyskretnych, skrypt WAT
3. Marian Klasztorny, Tadeusz Niezgoda – Mechanika Ogólna,
Podstawy teoretyczne, zadania z rozwiązaniami, Oficyna
Wydawnicza Politechniki Warszawskiej, Warszawa 2006
Rygory
• Egzamin pisemny –
możliwość egzaminu ustnego
• Dopuszczenie do egzaminu pisemnego
:
– zaliczenie ćwiczeń rachunkowych:
• zaliczenie 2 zadań domowych
• zaliczenie kolokwium
• Pytania egzaminacyjne –
będą opublikowane w CPP
4
MT_SS - w 1
Spis wykładów
Nr
wykładu
Treść wykładu
1.
Wprowadzenie; Klasyfikacja i definicje podstawowe;
Zasady statyki.
2.
Pojęcia podstawowe statyki: siła, rzut siły na oś i na
płaszczyznę, moment siły względem punktu i
względem osi, para sił.
3.
Twierdzenia statyki: wypadkowa układu sił w
metodzie analitycznej.
4.
Redukcja układu sił działających na ciało sztywne.
5
MT_SS - w 1
Nr
wykładu
Treść wykładu
5.
Warunki równowagi; Podpory.
6.
Metodyka rozwiązywania zagadnień technicznych.
7.
Zjawisko tarcia.
8.
Środki ciężkości; Momenty bezwładności.
9.
Metodyka rozwiązywania zagadnień statycznie
niewyznaczalnych
10. Kratownice; Metody rozwiązywania kratownic.
6
MT_SS - w 1
Nr
wykładu
Treść wykładu
11.
Kinematyka: ruch punktu materialnego i bryły
sztywnej.
12. Dynamika punktu materialnego i bryły sztywnej.
13.
Energia kinetyczna i energia potencjalna; Zasada
zachowania energii mechanicznej.
14. Drgania.
15. Współczynnik dynamiczności obciążenia.
7
MT_SS - w 1
Mechanika klasyczna
w-1
• Definicja
• Modele ciał materialnych
• „Klasyfikacja”
• Prawa mechaniki klasycznej
• Zasady statyki
• Treść zadania domowego nr 1.
8
MT_SS - w 1
MT_SS - w 1
9
Mechanika ogólna (klasyczna):
• nauka o ruchu ciał materialnych
• zajmuje się:
– ustalaniem ogólnych praw ruchu ciał materialnych
– zastosowaniem tych praw do opisu pewnych
wyidealizowanych schematów ciał rzeczywistych
MT_SS - w 1
10
Schematy ciał materialnych:
• Punkt materialny
• Ciało doskonale sztywne
Punkt materialny
• Jest to model ciał o tak małych wymiarach w
porównaniu z wymiarami obszaru, w którym
ciało się porusza,
że
• można pominąć zmiany położenia tego ciała
wywołane przez obrót
i
• traktować to ciało jako punkt geometryczny,
któremu
• przypisujemy pewną skończoną ilość materii.
MT_SS - w 1
11
Ciało doskonale sztywne
• Jest to takie wyidealizowane ciało stałe,
którego
• punkty nie zmieniają wzajemnych odległości
• bez względu na oddziaływanie czynników
zewnętrznych
MT_SS - w 1
12
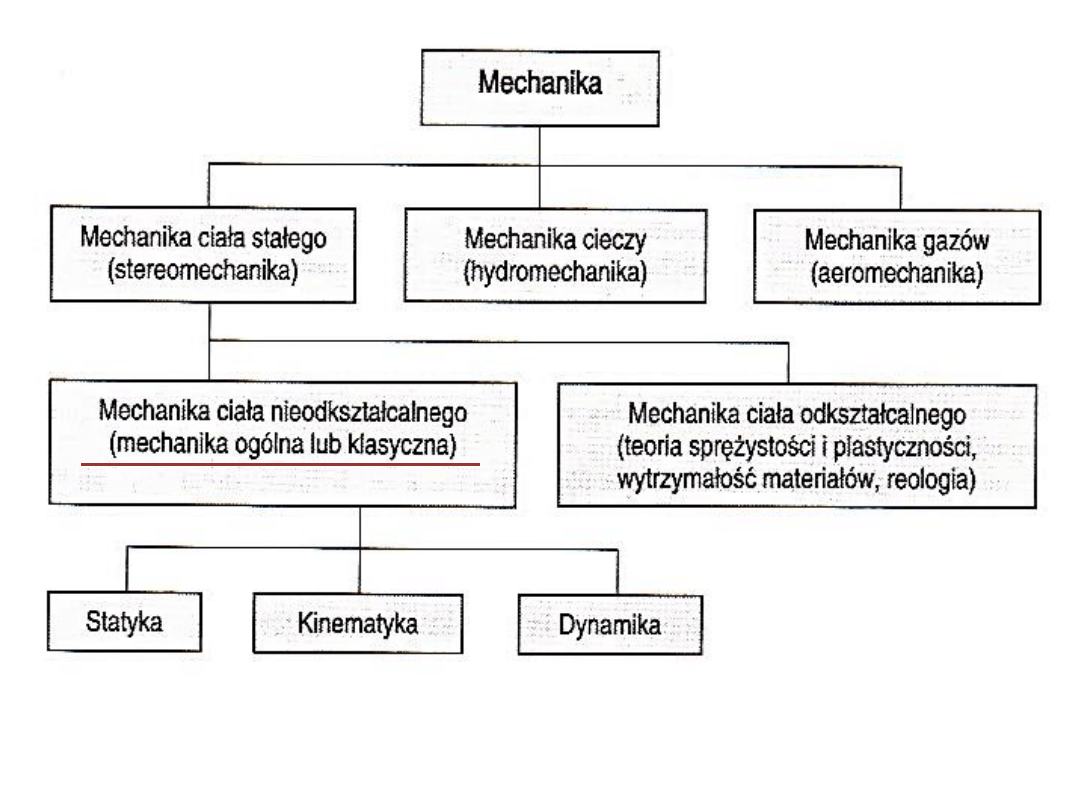
Działy mechaniki ogólnej
• Kinematyka
zajmuje się badaniem ilościowym ruchu ciał
niezależnie od czynników fizycznych
wywołujących ruch
• Dynamika
zajmuje się warunkami istnienia ruchu,
a więc rozpatruje ruch ciał materialnych
w zależności od sił działających na te ciała
Statyka
Jest częścią dynamiki dotyczącą tych
przypadków, w których działania wywierane
przez siły na ciało materialne znoszą się
wzajemnie, są więc w równowadze
MT_SS - w 1
13
Prawa mechaniki klasycznej
(Newton)
Dotyczą punktu materialnego poruszającego się pod
działaniem siły
PRAWO PIERWSZE
Punkt materialny, na który nie działa żadna siła, pozostaje w
spoczynku lub porusza się ruchem jednostajnym po linii
prostej
PRAWO DRUGIE
Przyśpieszenie
a punktu materialnego jest proporcjonalne
do siły P działającej na ten punkt i ma kierunek siły
m · a = P
m
– współczynnik proporcjonalności zwany masą
MT_SS - w 1
14
PRAWO TRZECIE
Siły wzajemnego oddziaływania dwóch punktów
materialnych są równe co do wartości i są przeciwnie
skierowane wzdłuż prostej łączącej oba punkty
MT_SS - w 1
15
m
2
P
1,2
P
1,2
= - P
2,1
P
1,2
= P
2,1
STATYKA
Równowaga ciał materialnych poddanych działaniom sił
Zasady statyki:
(6)
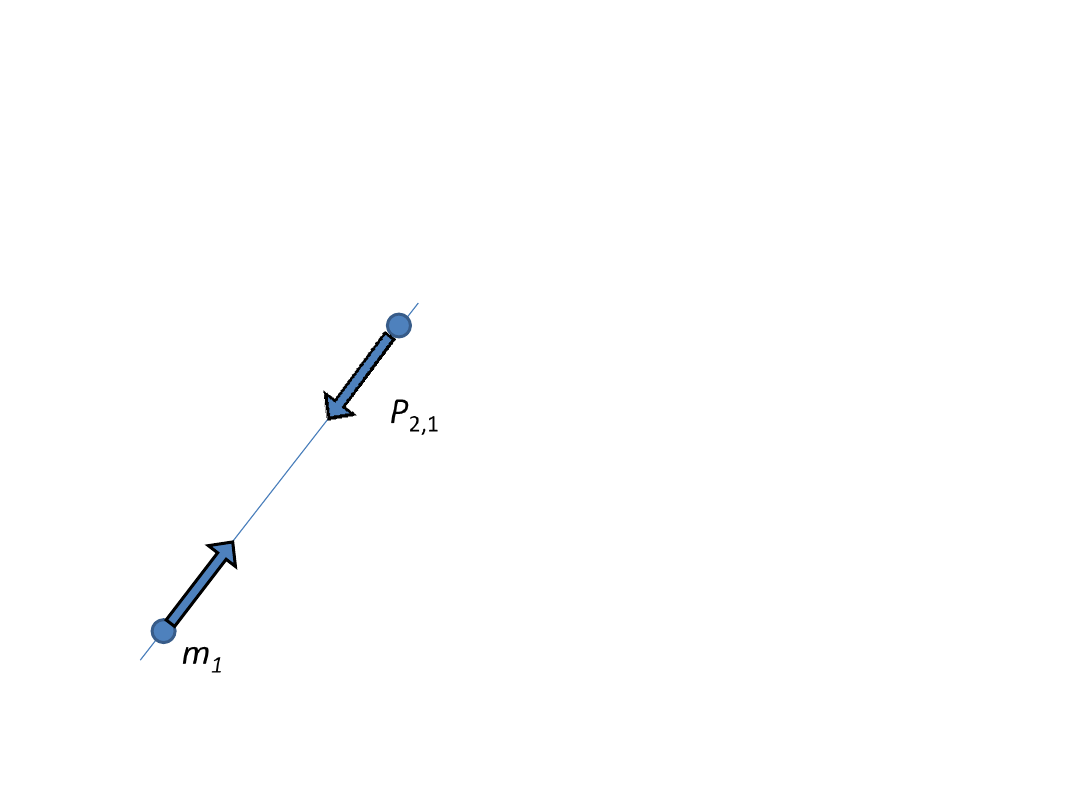
ZASADA RÓWNOLEGŁOBOKU SIŁ
Dowolne dwie siły P
1
i P
2
przyłożone do jednego punktu zastąpić możemy
siłą wypadkową R przyłożoną do tego punktu i przedstawioną jako wektor
będący przekątną równoległoboku ABCD zbudowanego na wektorach sił
danych.
MT_SS - w 1
16
cos
2
1
2
2
2
1
2
1
P
P
P
P
R
R
P
P
R
MT_SS - w 1
17
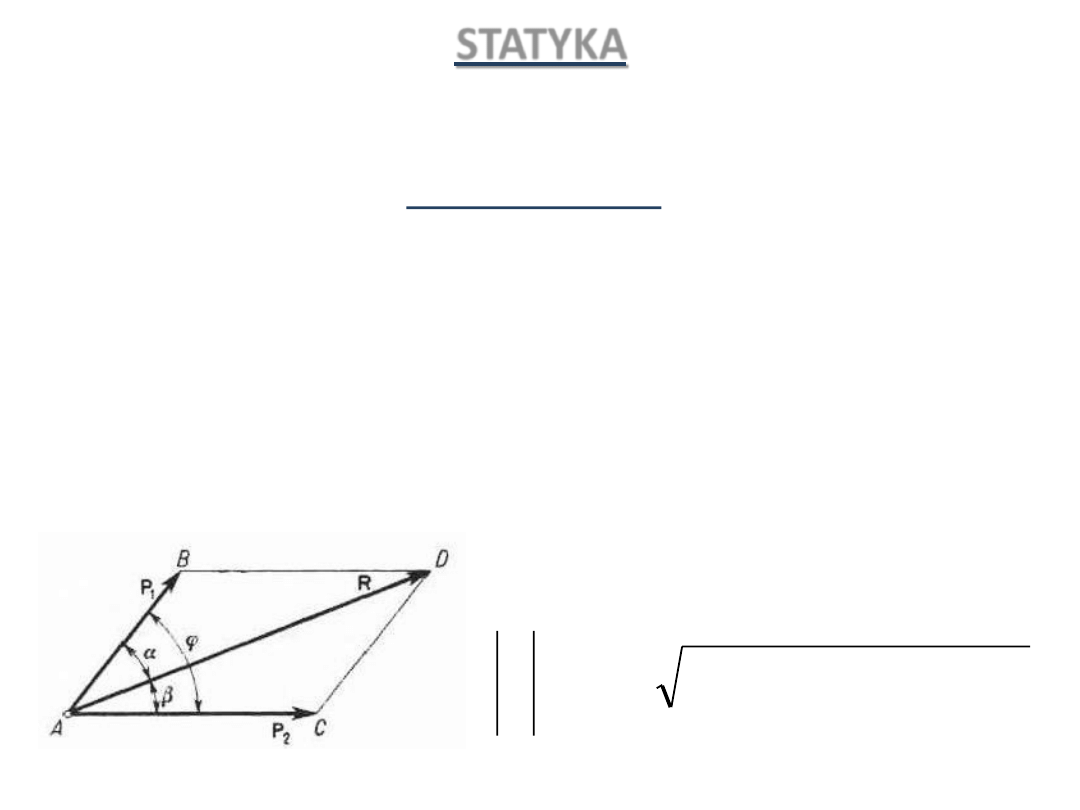
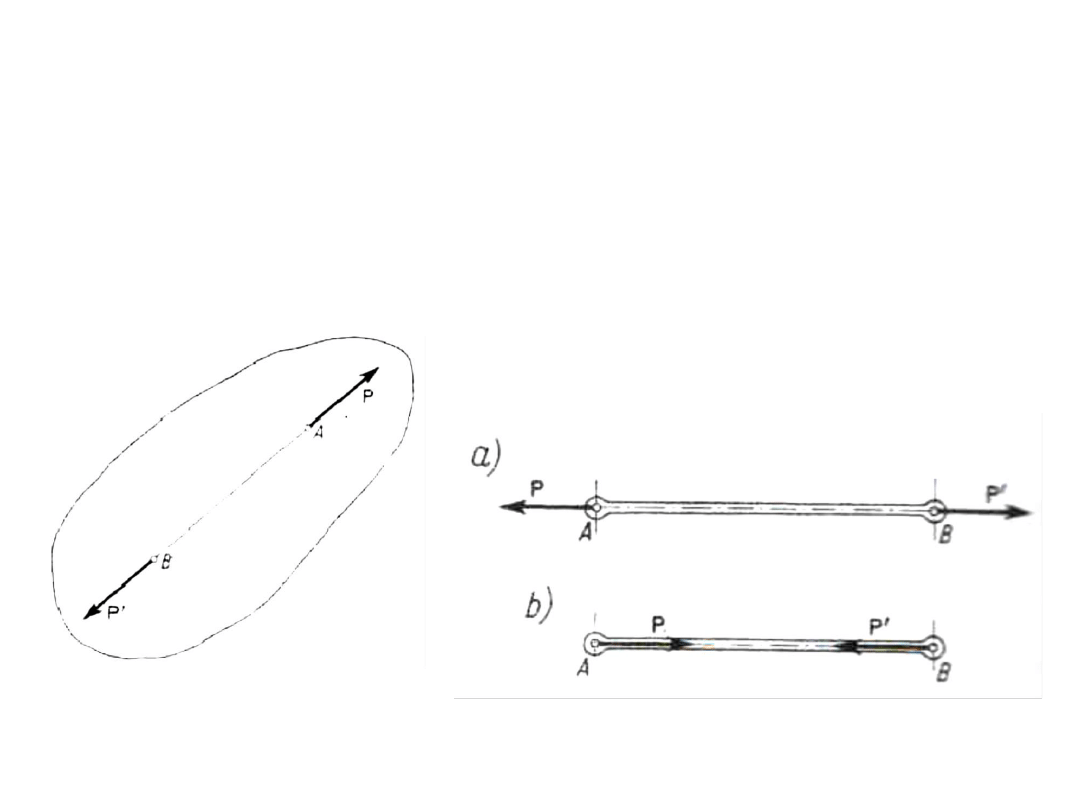
ZASADA RÓWNOWAGI DWÓCH SIŁ
Dwie siły przyłożone do ciała sztywnego równoważą się tylko wtedy,
gdy działają wzdłuż jednej prostej, są przeciwnie skierowane i mają te
same wartości liczbowe.
MT_SS - w 1
18
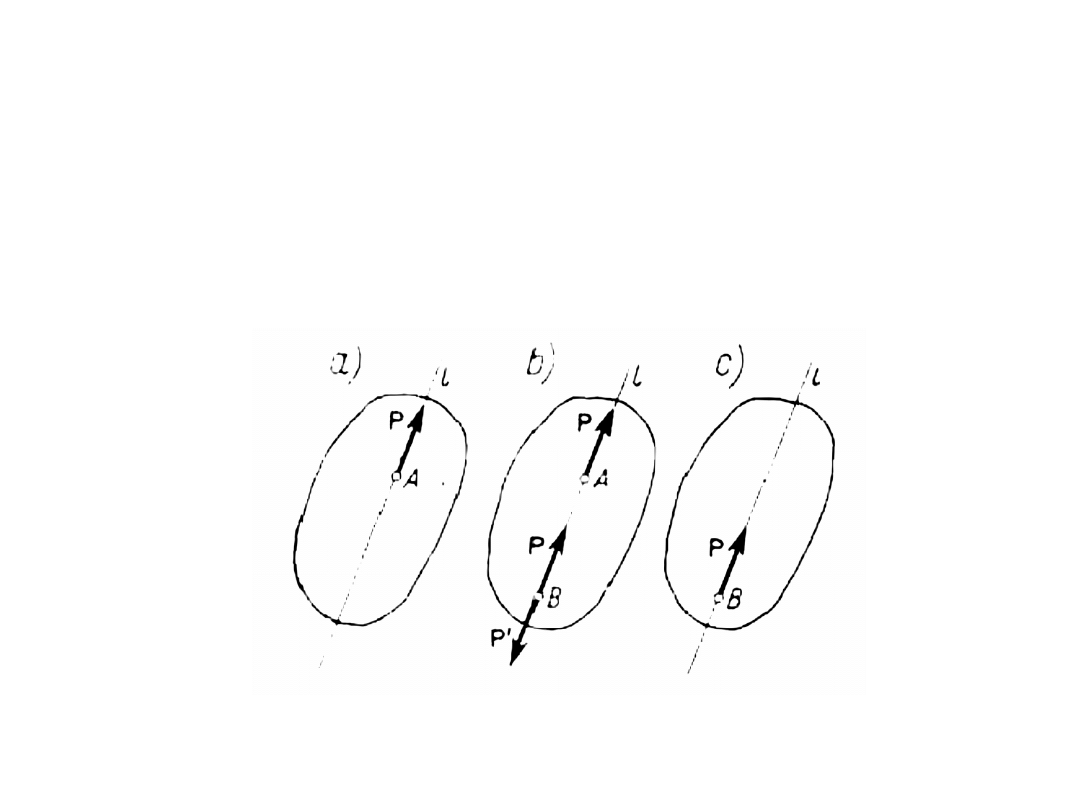
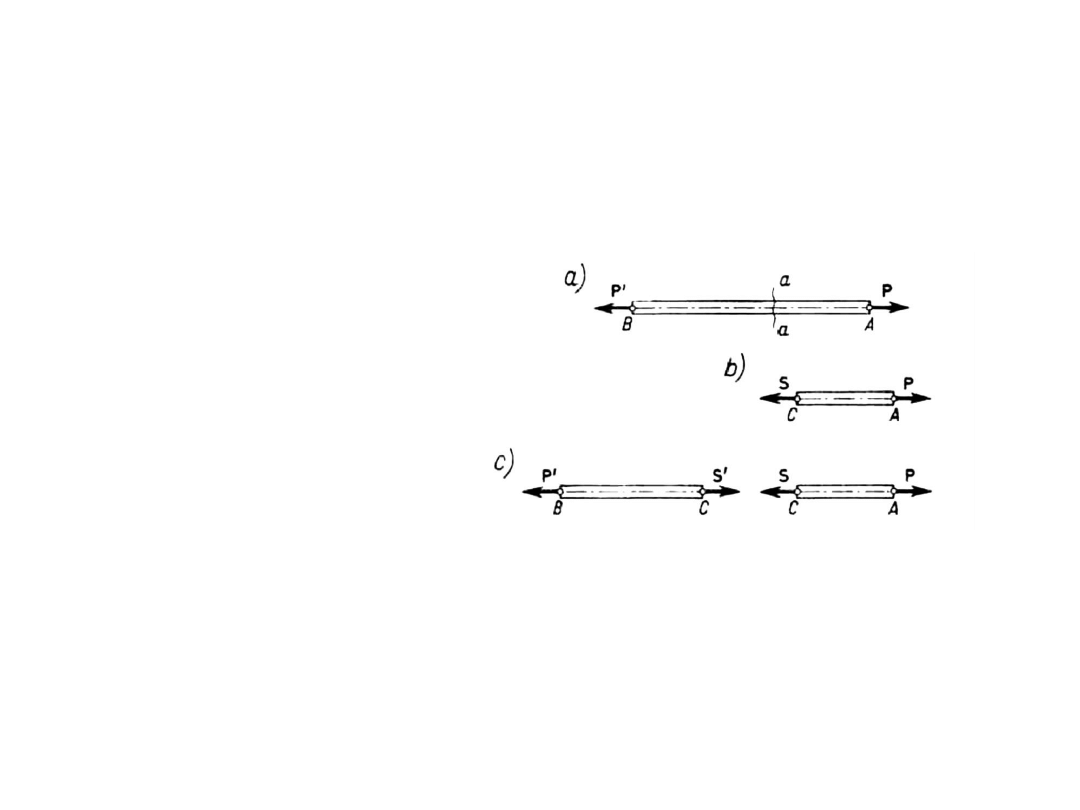
ZASADA NIEZALEŻNOŚCI DZIAŁANIA SIŁ
Działanie układu sił przyłożonych do ciała sztywnego nie ulegnie
zmianie, gdy do układu tego dodamy lub odejmiemy dowolny układ
równoważących się sił, czyli tzw. układ zerowy.
MT_SS - w 1
19
ZASADA ZESZTYWNIENIA
Równowaga sił działających na ciało odkształcalne nie zostanie
naruszona przez zesztywnienie tego ciała.
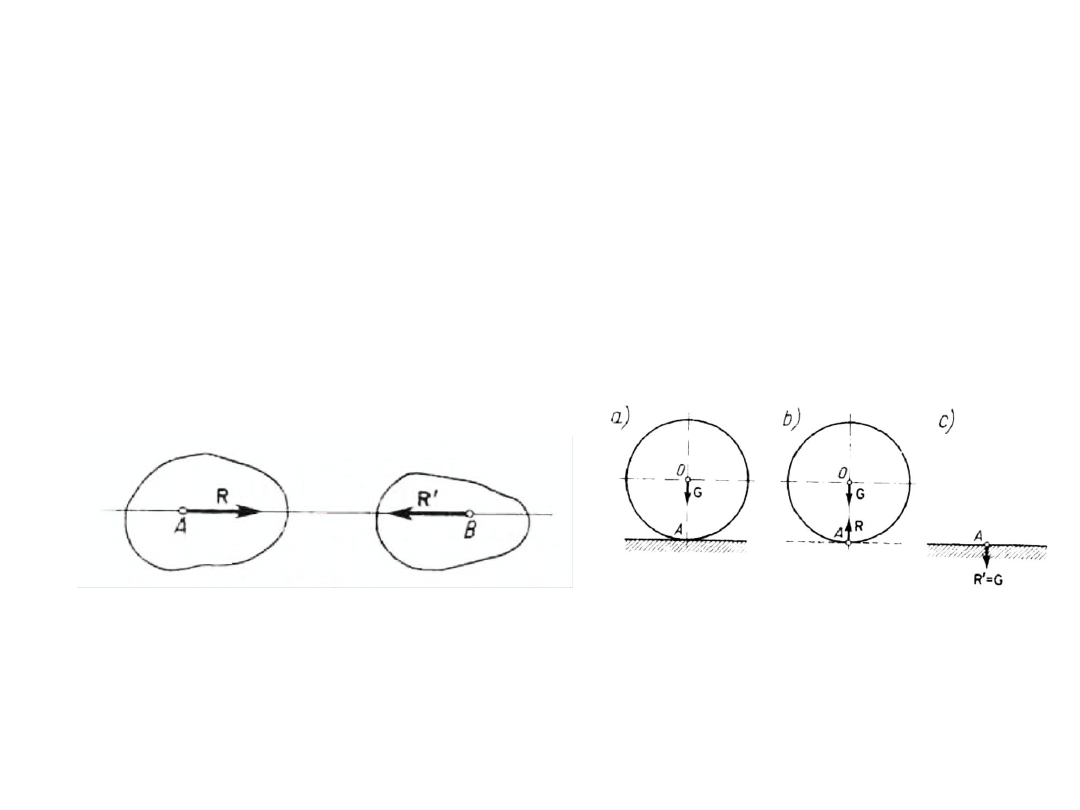
ZASADA AKCJI i REAKCJI
Każdemu działaniu towarzyszy równe co do wartości i przeciwnie
skierowane wzdłuż tej samej prostej przeciwdziałanie.
Siła z jaką ciało B działa na ciało A oznaczono przez R, a siłę z jaką
działa ciało A na ciało B oznaczono przez R’.
R = - R’ , R = R’
MT_SS - w 1
20
ZASADA OSWOBODZENIA OD WIĘZÓW
Każde ciało nieswobodne można
myślowo oswobodzić od więzów
zastępując przy tym ich działanie odpowiednimi reakcjami. Dalej
rozpatrywać można ciało tak, jak ciało swobodne podlegające
działaniu sił czynnych i sił reakcji
Więzami
nazywamy
ograniczenia ruchu ciała
przez stykanie się z
innymi ciałami. Takimi więzami są podpory tzn. elementy, za
pośrednictwem
których
element
konstrukcji
(
belka
,
rama
,
kratownica
,
łuk
, itp.) opiera się na fundamencie lub na innej
konstrukcji.
MT_SS - w 1
21
Więzy i ich reakcje
• Więzy idealne – więzy bez tarcia – T = 0
MT_SS - w 1
22
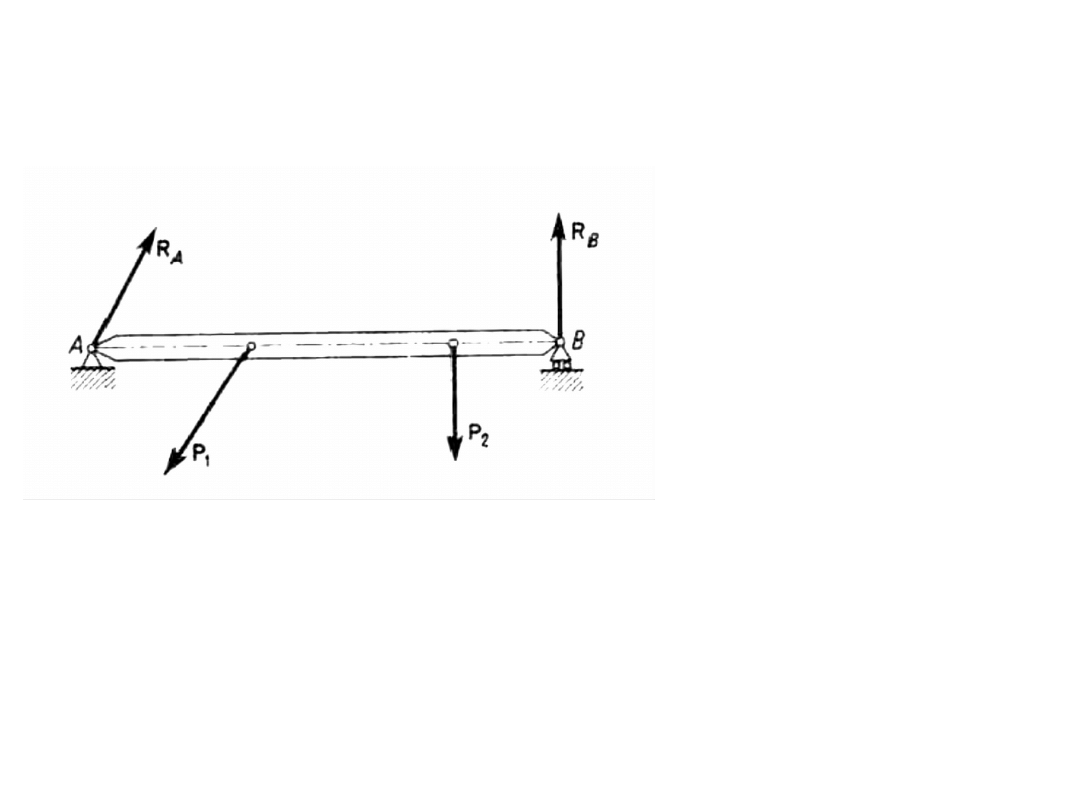
• Podpora przesuwna
(rolkowa)
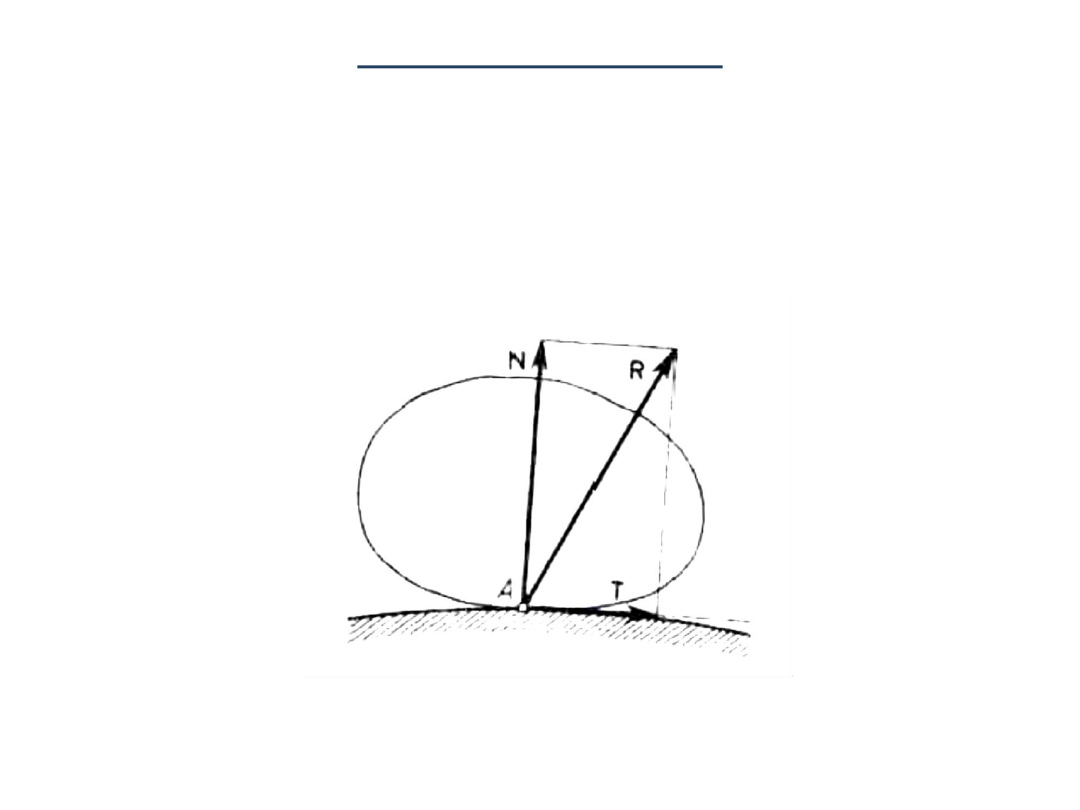
• Podpora stała
(przegubowa)
B
– reakcja bez siły tarcia
(opór toczenia rolek pomijalnie mały)
A
- reakcja z dwoma składowymi
Wektor R
B
prostopadły do AB
MT_SS - w 1
23
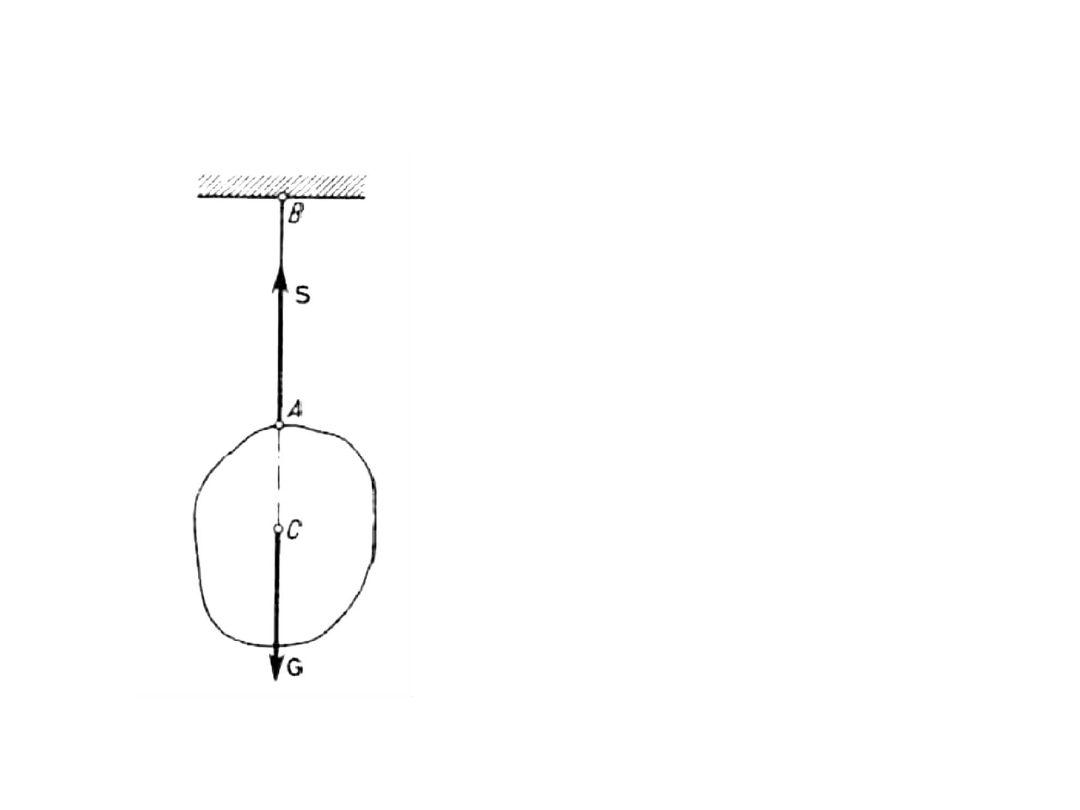
• Reakcja cięgna
Ciało zawieszone jest na cięgnie:
• nieważkim
• doskonale wiotkim
Cięgno nie stawia zatem oporu zginania
Reakcja „S” cięgna na ciało skierowana
wzdłuż cięgna
Cięgna są rozciągane
MT_SS - w 1
24
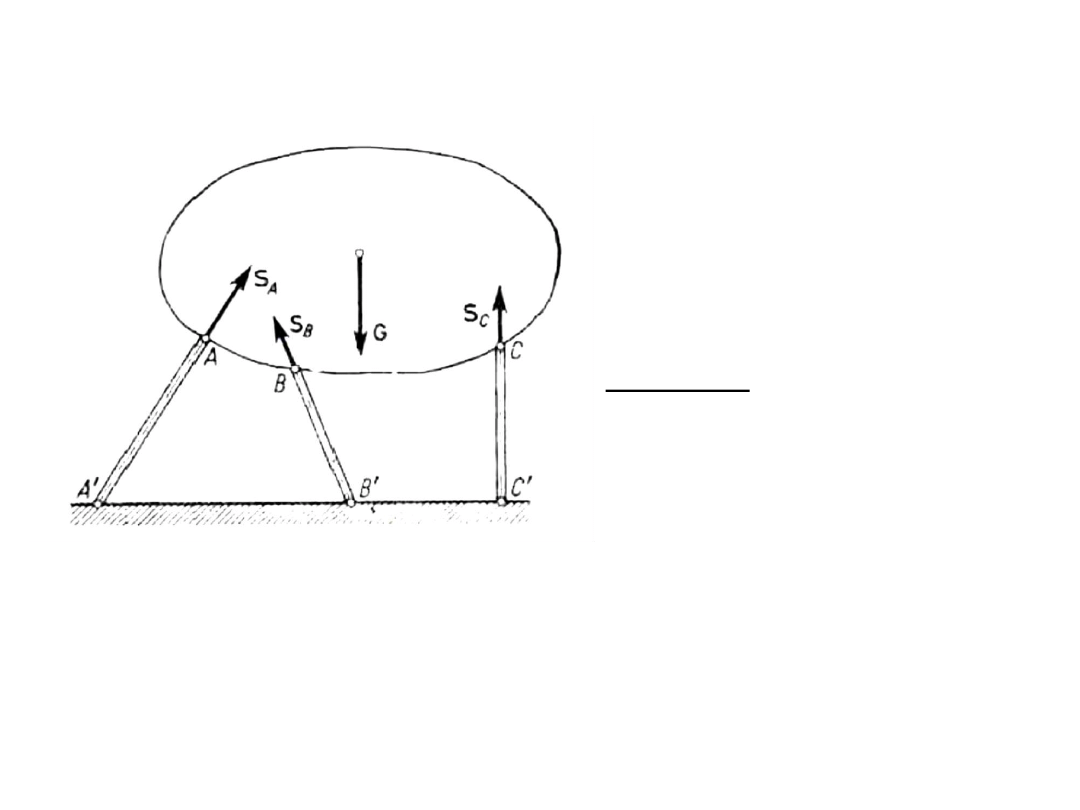
• Reakcja prętów przegubowych
Ciało unieruchomione za
pomocą prętów przegubowych
Pomijamy:
• ciężary własne prętów
• Tarcie w przegubach
Reakcje na ciało skierowane wzdłuż osi prętów
Pręty mogą być ściskane i rozciągane
MT_SS - w 1
25
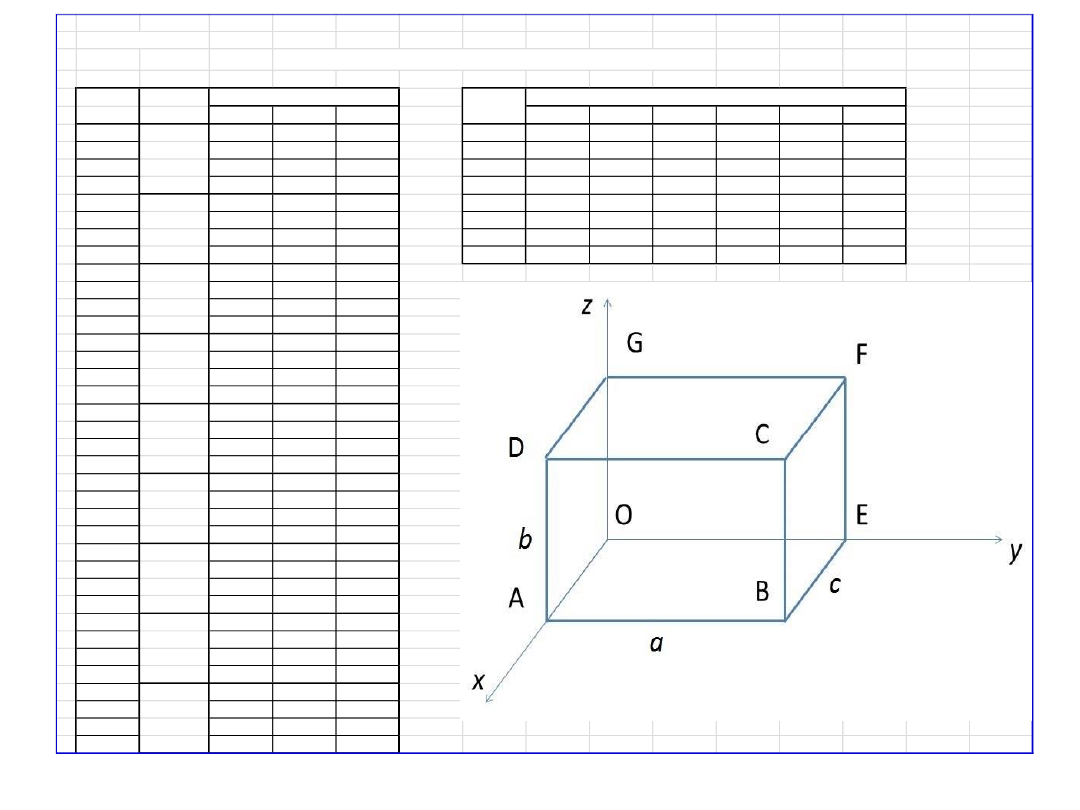
zadanie domowe nr 1.
Zredukuj układ sił do początku układu współrzędnych "O"
Numer
Punkty
zadania przyłożenia
F1
F2
F3
1
2
3
4
5
6
1 F1 - A
1
2
4
A
AB
AD
AO
AC
AG
AE
2 F2 - B
1
3
5
B
BE
BC
BA
BF
BD
BO
3 F3 - C
2
3
6
C
CD
CB
CF
CG
CA
CE
4
3
4
5
D
DG
DA
DC
DF
DO
DB
5 F1 - A
1
2
4
O
OA
OE
OG
OD
OB.
OF
6 F2 - B
1
3
5
E
EF
EB
EO
EG
EA
EC
7 F3 - D
2
3
6
F
FG
FC
FE
FD
FO
FB
8
3
4
5
G
GD
GO
GF
GE
GA
GC
9 F1 - A
1
2
4
10 F2 - B
1
3
5
11 F3 - O
2
3
6
12
3
4
5
13 F1 - A
1
2
4
14 F2 - B
1
3
5
15 F3 - E
2
3
6
16
3
4
5
17 F1 - A
1
2
4
18 F2 - B
1
3
5
19 F3 - F
2
3
6
20
3
4
5
21 F1 - A
1
2
4
22 F2 - B
1
3
5
23 F3 - G
2
3
6
24
3
4
5
25 F1 - A
1
2
4
26 F2 - C
1
3
5
27 F3 - D
2
3
6
28
3
4
5
29 F1 - A
1
2
4
30 F2 - C
1
3
5
31 F3 = O
2
3
6
32
3
4
5
33 F1 - A
1
2
4
34 F2 - C
1
3
5
35 F3 = O
2
3
6
36
3
4
5
Kierunek siły
Siła
Kierunek i zwrot
MT_SS - w 1
26
Never ever give up !
Wyszukiwarka
Podobne podstrony:
mt ss w 5 2014 lato
mt ss w 3 2014 lato
mt ss w 4 2014 lato
mt ss w 8 2014 lato
mt ss w 7 2014 lato
mt ss w 9 2014 lato
mt ss w 6 2014 lato
mt ss w 15 2014 lato
mt ss w 11 2014 lato
mt ss w 12 2014 lato
fd ss w3 2014 lato
fd ss w2 2014 lato
fd ss w1 2014 lato
Przykladowy egzamin IM 2014 lato (1), AGH, Fizyka
Polityka społeczna w antycznym Rzymie - konwersatorium, STUDIA - POLITYKA SPOŁECZNA, II stopień, 1 R
ERGONOMIA 4 SS 2014
więcej podobnych podstron