MT SS - w 12
1
DYNAMIKA
Zasada zachowania energii mechanicznej
w - 12
Dynamika
Dział mechaniki poświęcony badaniu zależności między:
• ruchem ciał materialnych, a
• siłami działającymi na te ciała.
Dynamika opiera się na prawach ruchu Newtona, które
dotyczą punktu materialnego
(model ciała rzeczywistego)
.
Z kinematyki wiemy, że w ogólnym przypadku ruch ciała jest
ruchem złożonym z :
• ruchu postępowego i
• ruchu obrotowego.

MT SS - w 12
2
Gdy traktujemy ciało jako punkt materialny, wówczas
pomijamy ruch obrotowy i bierzemy pod uwagę jedynie
ruch postępowy.
Na podstawie drugiego prawa dynamiki Newtona, możemy
wyznaczyd przyśpieszenie punktu materialnego wywołane
działaniem określonej siły.
Gdy na punkt materialny działa kilka sił, wówczas jego
przyśpieszenie określimy z
ZASADY NIEZALEŻNOŚCI DZIAŁANIA SIŁ
.
2
MT SS - w 12
3
3
ZASADY NIEZALEŻNOŚCI DZIAŁANIA SIŁ
Przyśpieszenie punktu materialnego, na który działają siły
P
1
, P
2
, …, P
n
równe jest sumie geometrycznej przyśpieszeo,
które miałby ten punkt, gdyby każda z tych sił działała na
niego osobno.
gdzie:
p
1
, p
2
, …, p
n
– przyśpieszenia punktu materialnego
wywołane działaniem poszczególnych sił.
n
p
p
p
p
2
1
Z drugiego prawa mechaniki Newtona wynika, że:
n
n
P
p
m
P
p
m
P
p
m
,
...
,
,
2
2
1
1
MT SS - w 12
4
4
Mnożąc obie strony równania przez masę m
otrzymujemy:
m
p
p
p
p
n
/
2
1
n
P
P
P
p
m
2
1
Zatem, rozpatrywany punkt materialny ma takie samo
przyśpieszenie, jakie miałby wówczas, gdyby działała na
niego jedna tylko siła wypadkowa, równa sumie
geometrycznej sił
P
1
, P
2
, …, P
n
.
MT SS - w 12
5
5
Jeśli wypadkowa sił działających na punkt materialny jest
równa zeru,
wówczas przyśpieszenie tego punktu jest także równe zeru.
Oznacza to, że punkt materialny porusza się w tym
przypadku:
• ruchem jednostajnym po linii prostej lub
• pozostaje w spoczynku.
0
p
m

MT SS - w 12
6
6
• Drugie prawo dynamiki Newtona określa w jaki sposób
przyśpieszenie punktu materialnego zależy od siły,
działającej na ten punkt.
• Przyśpieszenie punktu materialnego zależy od wyboru
układu odniesienia, względem którego rozpatruje się
ruch.
• Należy zatem wskazad dla jakiego układu odniesienia
prawo to oraz pozostałe dwa prawa Newtona
obowiązują.
• Taki układ odniesienia, w którym ważne są prawa
Newtona nosi nazwę
UKŁADU BEZWŁADNOŚCIOWEGO,
albo układu Galileusza
.
MT SS - w 12
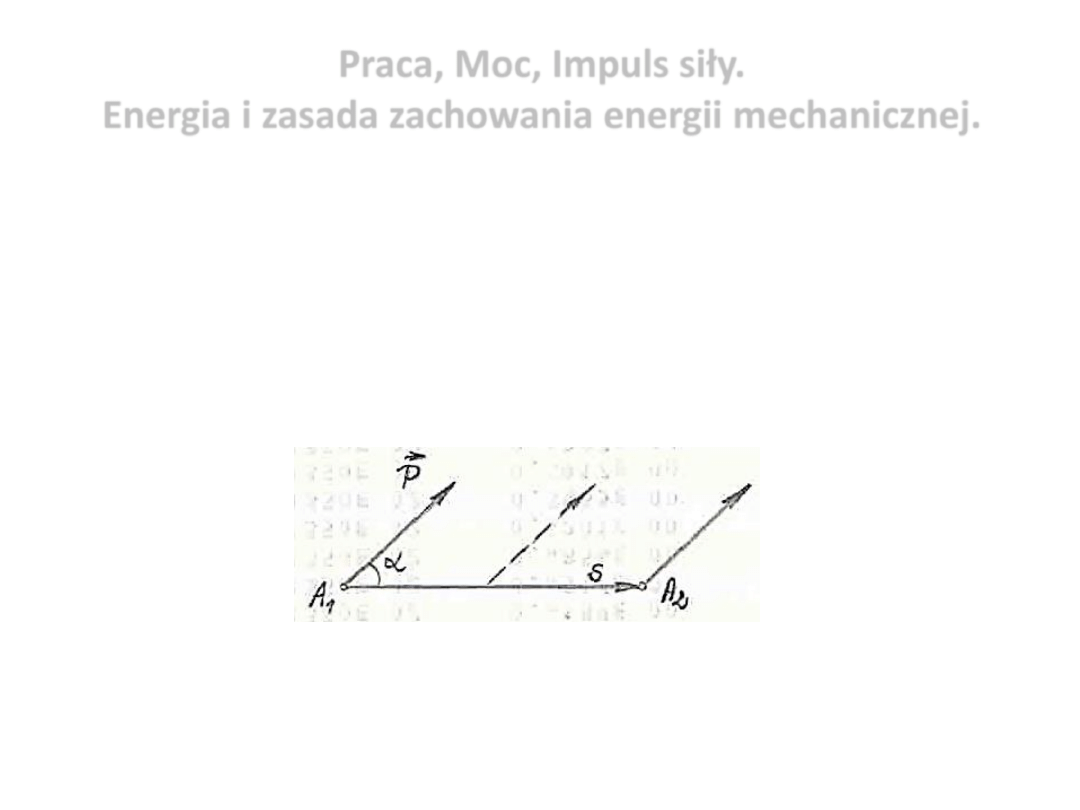
PRACA
Def. 1. Pracą siły stałej na prostoliniowym przesunięciu
punktu przyłożenia tej siły nazywamy iloczyn
wartości bezwzględnej przesunięcia s i miary rzutu
siły na kierunek tego przesunięcia .
L = P·s·cosα
P·cosα – miara rzutu siły P na kierunek przesunięcia s
7
Praca, Moc, Impuls siły.
Energia i zasada zachowania energii mechanicznej.
MT SS - w 12
8
L = P·s·cosα
Mogą zaistnied następujące przypadki:
α < π/2
-
L > 0
α > π/2
-
L < 0
α = π/2
-
L = 0
P s
α = 0
-
L
= P·s
Tak więc możemy zapisad:
L = P·s
Na podstawie powyższego wzoru możemy wyznaczyd
wartośd pracy siły P w przypadku gdy dane są jej składowe
oraz składowe przesunięcia s w prostokątnym układzie
współrzędnych.
z
z
y
y
x
x
s
P
s
P
s
P
s
P
L
MT SS - w 12
9
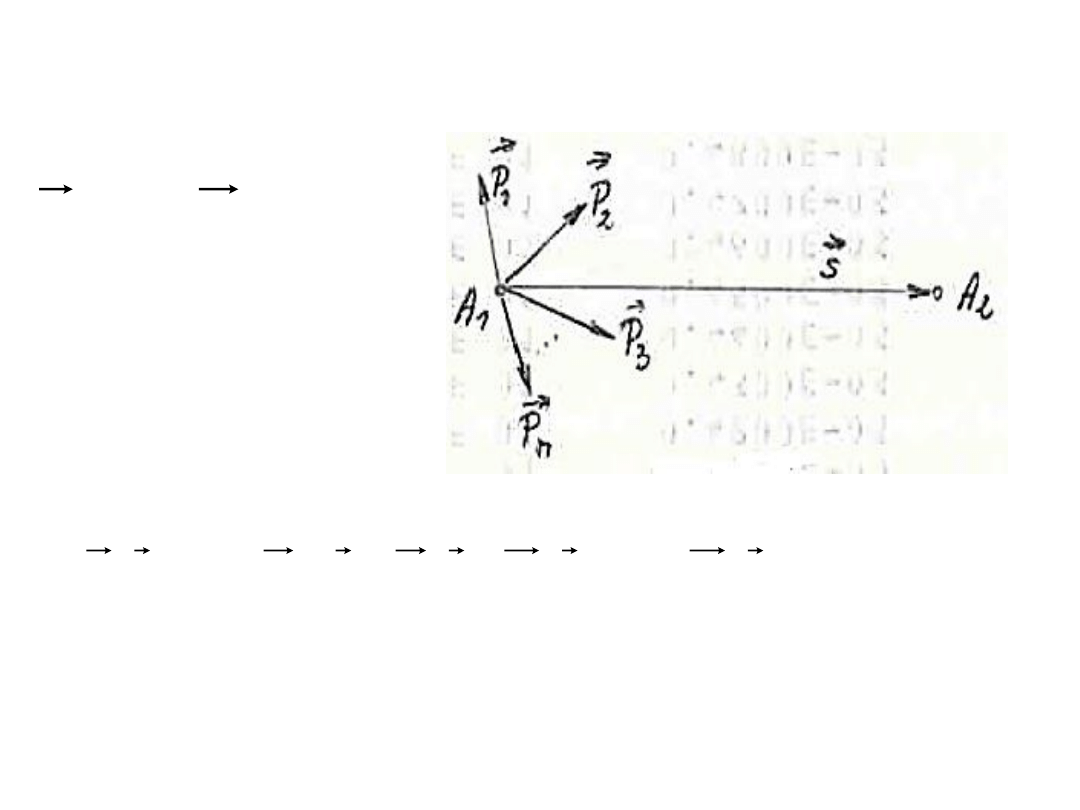
W przypadku, gdy siła P jest wypadkową n sił P
1
, P
2
, …,P
n
,
przyłożonych do jednego punktu, tzn.
wówczas można zapisad następujące zależności
n
i
i
P
P
1
n
i
i
n
n
n
i
i
L
L
L
L
L
s
P
s
P
s
P
s
P
s
P
L
1
2
1
2
1
1

MT SS - w 12
10
Tak więc:
gdzie:
L
i
= P
i
·s
jest pracą siły P na przesunięciu s.
Tw. Praca wypadkowej sił przyłożonych do jednego
punktu równa jest sumie prac poszczególnych sił.
n
i
i
L
L
1
MT SS - w 12
11
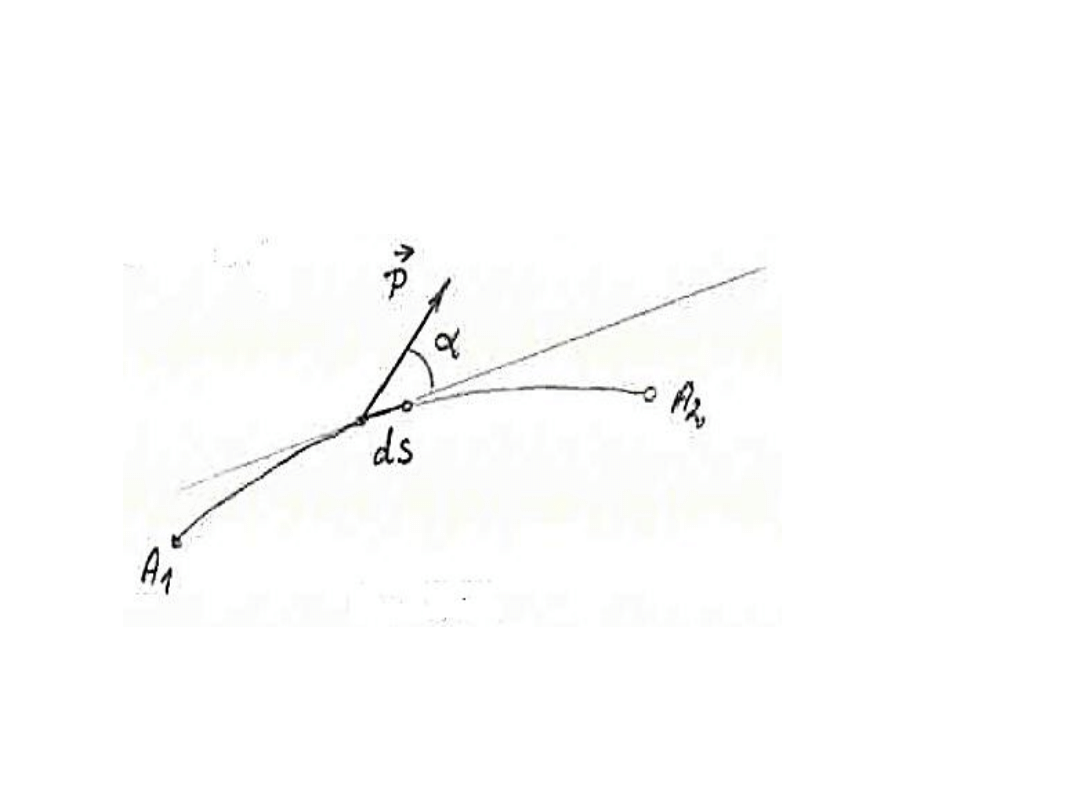
W przypadku, gdy punkt przyłożenia siły P doznaje dowolnego
krzywoliniowego przesunięcia należy w pierwszej kolejności
obliczyd tzw. PRACĘ ELEMENTARNĄ dL, tzn. pracę siły P na
elementarnym przesunięciu ds. punktu przyłożenia siły
gdzie: α jest kątem, który siła P tworzy ze styczną do toru
punktu przyłożenia siły.
ds
P
dL
cos
MT SS - w 12
12
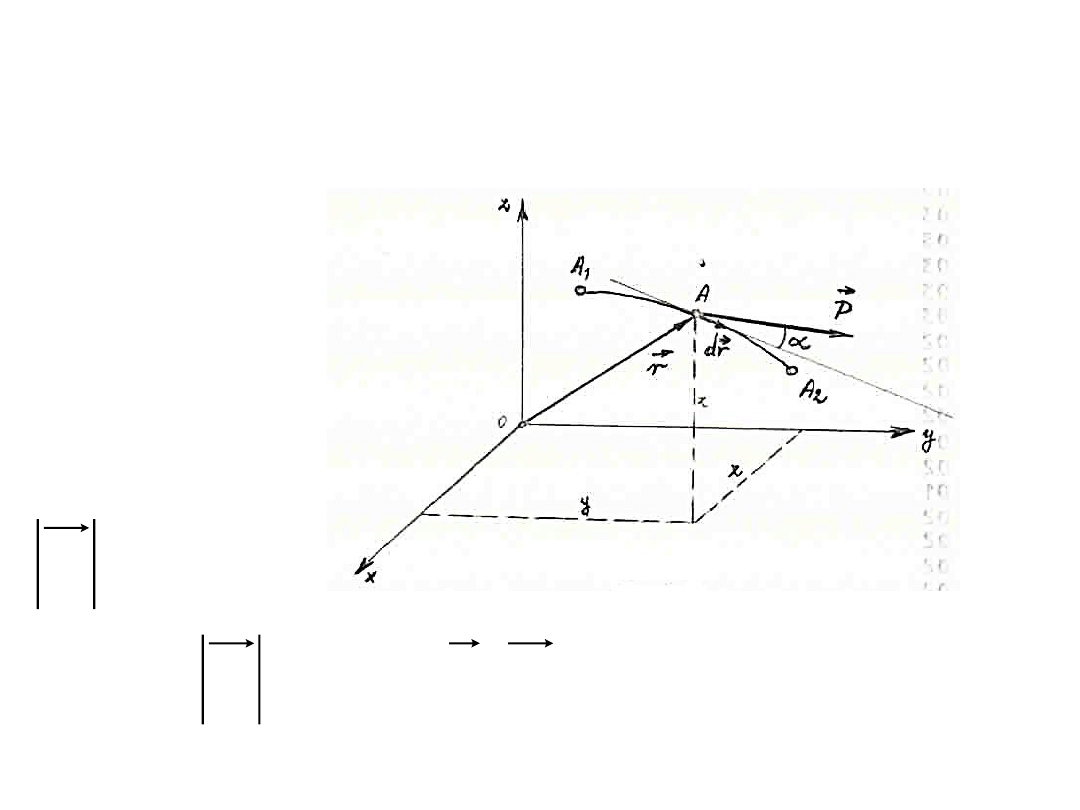
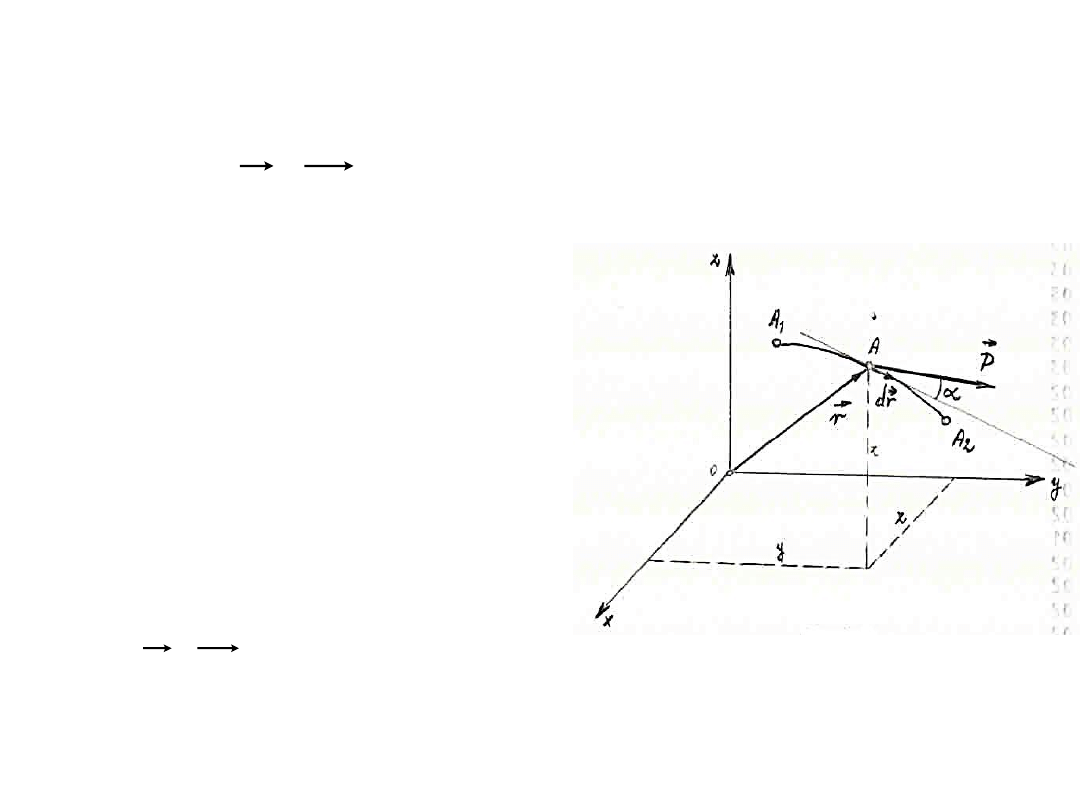
Jeśli położenie punktu materialnego określone jest w
prostokątnym
układzie
współrzędnych
za
pomocą
promienia-wektora r, wówczas
dz
P
dy
P
dx
P
dr
P
dr
P
dL
ds
dr
z
y
x
cos
MT SS - w 12
13
Praca elementarna dL jest równa iloczynowi skalarnemu siły P
i różniczki geometrycznej dr promienia-wektora r.
dz
P
dy
P
dx
P
dr
P
dL
z
y
x
Aby obliczyd pracę siły P
w przypadku gdy jej punkt przyłożenia A
opisuje skooczony odcinek A
1
A
2
krzywoliniowego toru, należy scałkowad
wyrażenie określające pracę
elementarną wzdłuż łuku A
1
A
2
.
2
1
2
1
2
1
cos
A
A
z
y
x
A
A
A
A
dz
P
dy
P
dx
P
ds
P
dr
P
L
MT SS - w 12
14
W przypadku, gdy dane są równania ruchu punktu
przyłożenia siły P, tzn.:
x = x(t), y = y(t), z = z(t)
wówczas pod znakiem całki we wzorze
należy podstawid
otrzymując
2
1
2
1
2
1
cos
A
A
z
y
x
A
A
A
A
dz
P
dy
P
dx
P
ds
P
dr
P
L
,
,
,
dt
z
dz
dt
y
dy
dt
x
dx
dt
z
P
y
P
x
P
L
t
t
z
y
x
2
1
MT SS - w 12
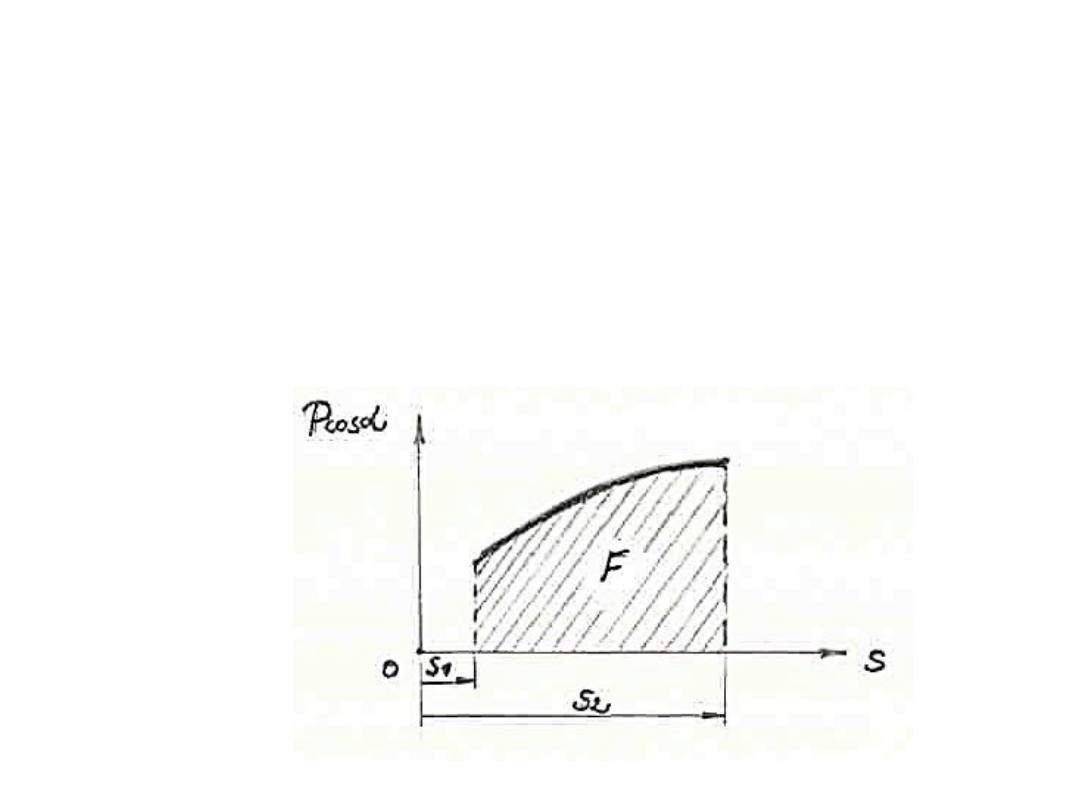
15
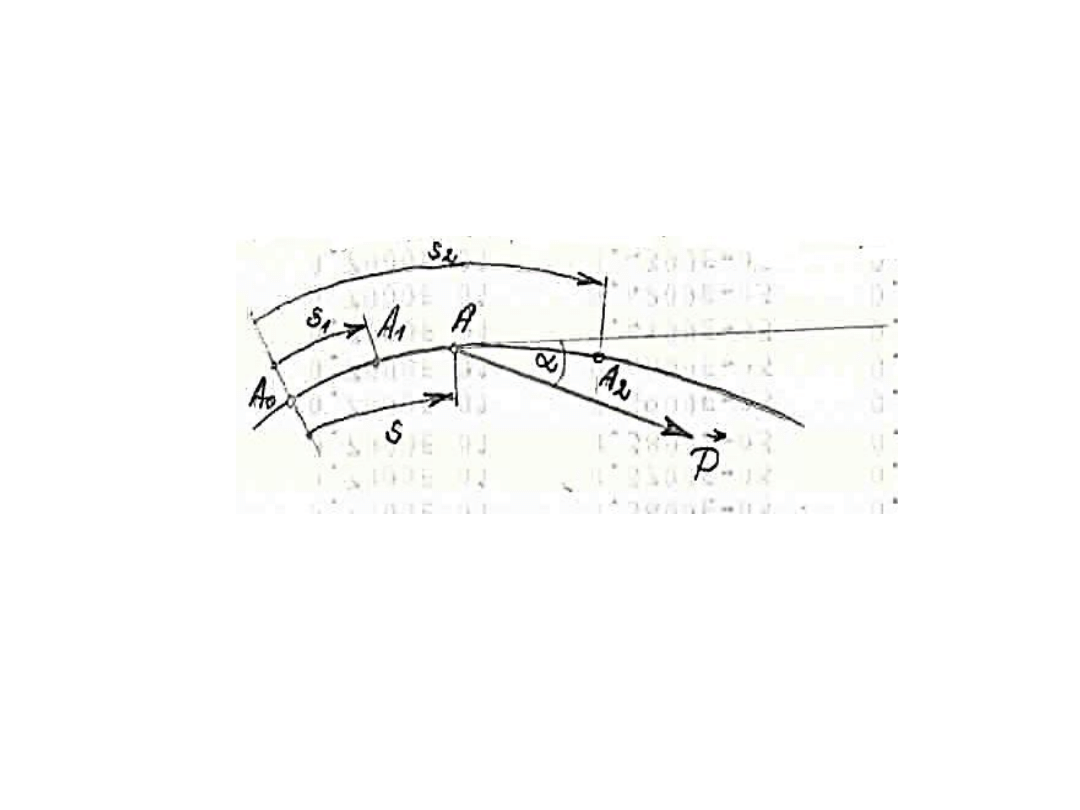
W szczególnym przypadku, gdy siła P, zależy od położenia
punktu A na torze, wówczas miarę rzutu siły na styczną do
toru, czyli P·cosα można wyrazid w zależności od
współrzędnej łukowej s odmierzonej wzdłuż toru punktu A.
W tym przypadku mamy
2
1
cos
s
s
ds
P
L
MT SS - w 12
16
2
1
cos
s
s
ds
P
L
Gdy zależnośd P·cosα od współrzędnej łukowej s dana jest w
postaci wykresu, wówczas całka występująca w powyższym
równaniu równa jest polu F powierzchni figury
zakreskowanej na rysunku.
MT SS - w 12
17
Praca siły wzdłuż skooczonego łuku A
1
A
2
toru punktu
materialnego poruszającego się w polu sił.
Założenie:
W pewnym obszarze na poruszający się punkt materialny
działa siła P zależna tylko od położenia tego punktu w
przestrzeni.
Ponieważ w tym przypadku każdemu punktowi
wspomnianego obszaru odpowiada określony wektor
przedstawiający siłę P, mamy do czynienia z niezależnym od
czasu polem wektorowym, które nazywamy
STACJONARNYM POLEM SIŁ
.
Jeżeli każdemu punktowi pola odpowiada taka sama siła, to
pole to nazywamy polem jednorodnym.

MT SS - w 12
18
W polu sił stacjonarnych składowe siły P są funkcjami
współrzędnych punktu przyłożenia, tzn.
.
,
,
,
,
,
,
,
,
z
y
x
P
P
z
y
x
P
P
z
y
x
P
P
z
z
y
y
x
x
Gdy punkt materialny porusza się w polu sił, wówczas praca
L sił tego pola określona jest za pomocą następującej całki
krzywoliniowej:
2
1
,
,
,
,
,
,
A
A
z
y
x
dz
z
y
x
P
dy
z
y
x
P
dx
z
y
x
P
L
Praca ta zależy na ogół od toru, po którym porusza się
rozpatrywany punkt przechodząc z położenia A
1
w
położenie A
2
.

MT SS - w 12
19
Istnieją takie pola sił, w których praca zależna jest tylko od
położenia początkowego i położenia koocowego i nie zależy
tym samym od postaci toru rozpatrywanego punktu.
Pola o takich właściwościach nazywamy
POLAMI ZACHOWAWCZYMI
.
W polu zachowawczym zdefiniowad można funkcję V(x, y, z),
której pochodne cząstkowe względem współrzędnych x, y, z
wzięte ze znakiem minus równe są składowym siły pola
wzdłuż odpowiednich osi układu współrzędnych, tzn.
V(x, y, z) –
POTENCJAŁ
zachowawczego pola sił,
Siła P –
GRADIENT POTENCJAŁU POLA
.
,
,
z
V
P
y
V
P
x
V
P
z
y
x

MT SS - w 12
20
W przypadku istnienia potencjału pola V, praca
elementarna dL, występująca w równaniu
przyjmie postad
Wynika stąd, że praca elementarna równa jest różniczce
zupełnej potencjału V wziętej ze znakiem minus.
2
1
,
,
,
,
,
,
A
A
z
y
x
dz
z
y
x
P
dy
z
y
x
P
dx
z
y
x
P
L
.
dV
dz
z
V
dy
y
V
dx
x
V
dz
P
dy
P
dx
P
dL
z
y
x

MT SS - w 12
21
Praca siły wzdłuż skooczonego łuku A
1
A
2
toru punktu
materialnego poruszającego się w zachowawczym polu sił
jest określona następującym wzorem
gdzie V
1
i V
2
oznaczają wartości potencjału pola sił dla
położenia
początkowego
i
położenia
koocowego
rozpatrywanego punktu, czyli
x
1
, y
1
, z
1
- współrzędne punktu A
1
,
x
2
, y
2
, z
2
- współrzędne punktu A
2
.
2
1
2
1
2
1
V
V
dV
dz
z
V
dy
y
V
dx
x
V
L
A
A
A
A
.
,
,
,
,
,
2
2
2
2
1
1
1
1
z
y
x
V
V
z
y
x
V
V

MT SS - w 12
22
Z powyższego wynika następujące twierdzenie:
Tw. Praca w zachowawczym polu sił równa jest różnicy
potencjałów w położeniu początkowym i położeniu
koocowym punktu.
Praca w zachowawczym polu sił nie zależy zatem od tego,
po jakim torze poruszał się punkt materialny przechodząc z
położenia początkowego w położenie koocowe.
Interpretacja fizyczna potencjału pola sił
Potencjał V w określonym punkcie pola sił równy jest pracy,
którą wykonuje siła działająca na punkt materialny
poruszający się w tym polu z miejsca, w którym potencjał
równy jest V, do miejsca gdzie potencjał równy jest zeru.
MT SS - w 12
23
IMPULS SIŁY
Def. 2. Impulsem S siły P, działającej na punkt materialny
od chwili t
o
do chwili t nazywamy, wektor równy
iloczynowi tej siły i czasu (t – t
o
), w którym ta siła
działała.
Gdy t > t
o
, wówczas impuls S ma ten sam kierunek co
rozpatrywana siła, a jego składowe w prostokątnym układzie
współrzędnych są następujące
const
P
t
t
P
S
o
,
,
,
,
o
z
z
o
y
y
o
x
x
t
t
P
S
t
t
P
S
t
t
P
S
MT SS - w 12
24
W przypadku, gdy siła działająca na punkt materialny,
zmienia z upływem czasu swoją wartośd i swój kierunek,
należy określid impuls elementarny siły, dS.
lub jego składowe
Impuls S siły P(t), działającej na punkt materialny w
skooczonym przedziale czasu od t
o
do t, równy jest
zaś jego składowe
dt
P
dS
.
,
,
dt
P
dS
dt
P
dS
dt
P
dS
z
z
y
y
x
x
,
dt
t
P
S
t
t
o
,
,
,
dt
t
P
S
dt
t
P
S
dt
t
P
S
t
t
z
z
t
t
y
y
t
t
x
x
o
o
o
MT SS - w 12
25
MOC SIŁY
Def. 3.
Mocą N siły P nazywamy pracę tej siły
wykonaną w ciągu jednostki czasu.
Ponieważ
gdzie υ jest prędkością punktu przyłożenia siły, zatem
α – kąt między wektorami P i υ, tzn. między siłą, a
styczną do toru punktu przyłożenia siły.
dt
r
d
P
dt
dL
N
dt
r
d
cos
P
P
N

MT SS - w 12
26
Jednostki w układzie SI
:
• Jednostka pracy
– DŻUL – 1 J
Tak więc,
1 J równy jest pracy siły 1N na przesunięciu 1m,
w przypadku gdy przesunięcie odbywa się w
kierunku działania siły.
• Jednostka mocy – WAT – 1W
• Jednostka impulsu siły – NIUTONOSEKUNDA
kg
s
m
m
s
kg
m
m
N
J
2
2
2
1
1
1
1
1
1
kg
s
m
s
J
W
3
2
1
1
/
1
1
1
1
1
1
1
s
m
kg
s
N
Ns
MT SS - w 12
27
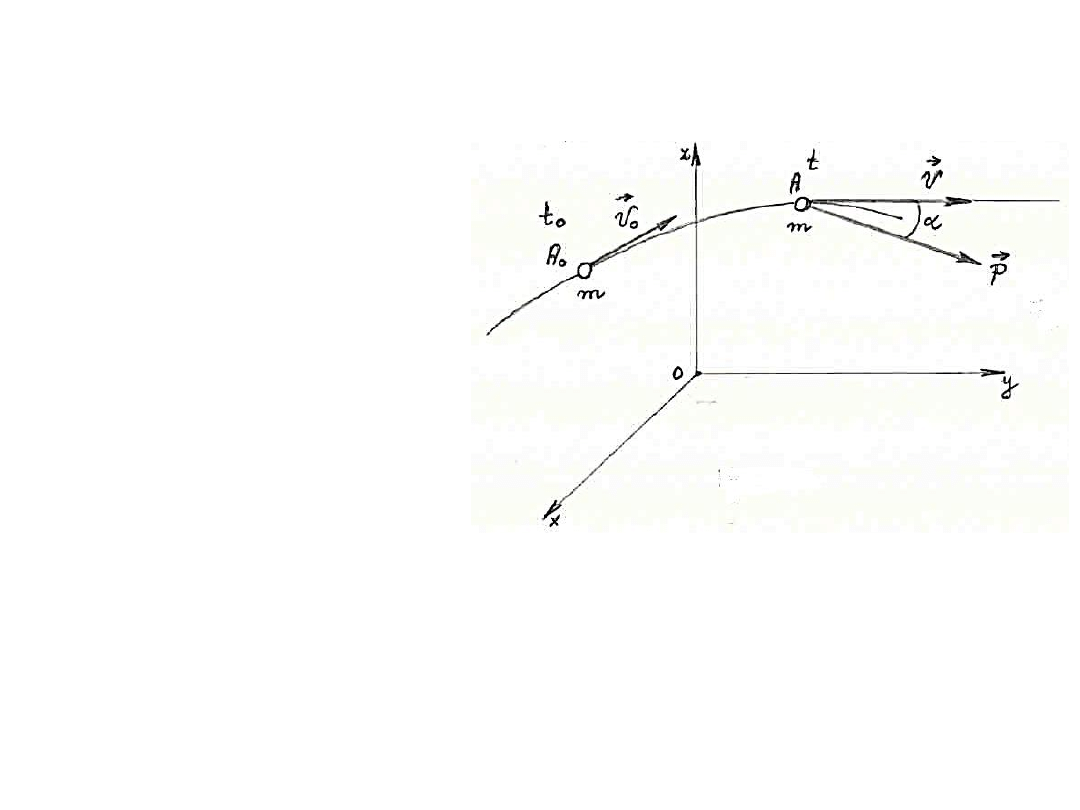
ENERGIA
Niech punkt materialny o masie m porusza się po
krzywoliniowym torze l.
A
o
, A – położenia punktu
materialnego w
chwilach t
o
i t,
υ
o
, υ – prędkości tego punktu w
odpowiednich chwilach,
P – wypadkowa sił działających na punkt materialny,
α – kąt, który wypadkowa tworzy ze styczną do toru w
chwili t.
MT SS - w 12
28
Równanie dynamiczne ruchu wzdłuż stycznej do toru
rozpatrywanego punktu materialnego
gdzie
Mnożąc obie strony powyższego równania przez υ
otrzymamy
t
a
dt
d
P
dt
d
m
cos
cos
P
dt
d
m
MT SS - w 12
29
Ponieważ masa m jest wielkością stałą, lewą stronę
powyższego równania można przedstawid jako
co po podstawieniu do równania z poprzedniej strony daje
lub
,
2
2
m
dt
d
dt
d
m
cos
2
2
P
m
dt
d
dt
P
m
d
cos
2
2
MT SS - w 12
30
We wzorze
Ale
υ ·dt = ds ,
gdzie ds oznacza elementarną drogę, którą rozpatrywany
punkt materialny przebywa w czasie dt.
Możemy zatem równanie powyższe zapisad jako
Energia kinetyczna punktu materialnego
dt
P
m
d
cos
2
2
ds
P
m
d
cos
2
2
MT SS - w 12
31
Def. 4.
Energia kinetyczna T punktu materialnego jest
to wielkośd równa połowie iloczynu masy
punktu i kwadratu prędkości tego punktu.
2
2
2
2
2
1
2
1
z
y
x
m
m
T
Ponieważ
gdzie dL oznacza elementarną pracę siły P, zatem równanie
możemy przedstawid jako
,
cos
dL
ds
P
ds
P
m
d
cos
2
2
dL
m
d
2
2
MT SS - w 12
32
dL
m
d
2
2
Całkując równanie
w przedziale czasu t
o
do t otrzymujemy
Z powyższego równania wynika twierdzenie o energii
kinetycznej.
Tw. Przyrost energii kinetycznej punktu materialnego w
skooczonym przedziale czasu równy jest sumie prac,
które wykonały w tym samym czasie wszystkie siły
działające na ten punkt.
.
L
T
T
o

MT SS - w 12
33
W przypadku gdy punkt materialny porusza się w
zachowawczym polu sił, wówczas praca sił pola równa jest
różnicy potencjałów w położeniu początkowym i koocowym.
Można zatem sformułowad następującą definicję.
Def. 5.
Energia potencjalna punktu materialnego jest
to wielkośd równa pracy, którą wykonałaby siła
pola działająca na rozpatrywany punkt przy
przejściu punktu z danego położenia, w
położenie, w którym potencjał równy jest zeru.
V
V
L
o
MT SS - w 12
34
L
T
T
o
Podstawiając
do
otrzymujemy
czyli
Możemy zatem zapisad:
energia mechaniczna
V
V
L
o
V
V
T
T
o
o
.
o
o
V
T
V
T
const
V
T

MT SS - w 12
35
Def. 6.
Energią mechaniczną punktu materialnego
nazywamy sumę jego energii kinetycznej i
potencjalnej.
Z zależności
wynika następujące twierdzenie noszące nazwę:
ZASADA ZACHOWANIA ENERGII MECHANICZNEJ
const
V
T
Tw. Gdy punkt materialny porusza się w zachowawczym
polu sił, suma jego energii kinetycznej i energii
potencjalnej, zwane energią mechaniczną, jest
wielkością stałą.

MT SS - w 12
36
W przypadku, gdy na poruszający się punkt materialny,
oprócz sił o potencjale V(x, y, z), działają inne siły, wówczas
w równaniu
określającym przyrost energii kinetycznej, należy uwzględnid
również pracę tych ostatnich sił.
Oznaczając przez L pracę sił nie mających potencjału
otrzymujemy:
a stąd
V
V
T
T
o
o
,
L
V
V
T
T
o
o
L
V
T
V
T
o
o
MT SS - w 12
37
• Jeżeli siłami nie mającymi potencjału są siły oporów ruchu,
jak np. opór powietrza lub siły tarcia, to praca tych sił jest
ujemna, gdyż siły te mają kierunek przeciwny do kierunku
prędkości punktu materialnego.
• W przypadku, gdy L < 0 , z równania
wynika, że suma energii potencjalnej i kinetycznej w
położeniu koocowym jest mniejsza niż w położeniu
początkowym.
• Mamy wtedy do czynienia ze
stratą energii mechanicznej,
której częśd, zgodnie z ogólnym prawem zachowania
energii, zamienia się w inną formę energii, np. w energię
cieplną.
L
V
T
V
T
o
o

MT SS - w 12
38
Układ punktów materialnych
Energia kinetyczna układu n punktów materialnych opisana
jest wzorem,
w którym prędkośd punktu „i” określona jest względem
pewnego, nieruchomego układu odniesienia Oxyz, w
stosunku do którego badamy ruch układu punktów
materialnych.
n
i
i
i
m
T
1
2
2
MT SS - w 12
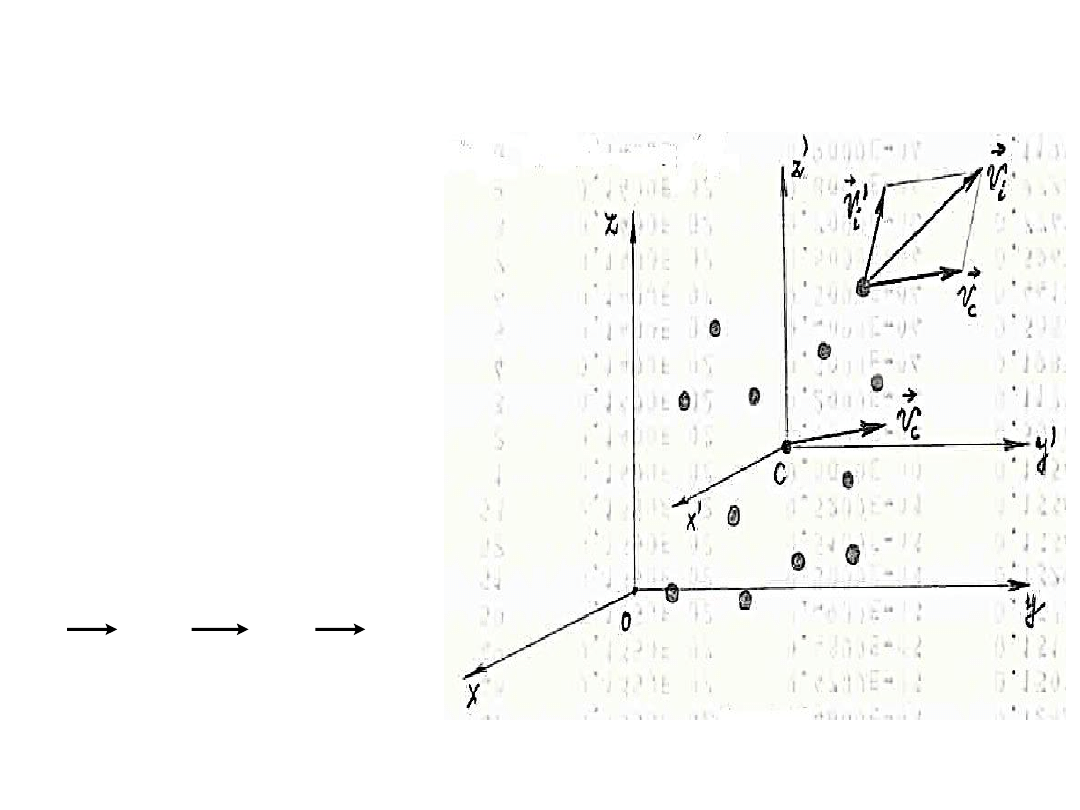
39
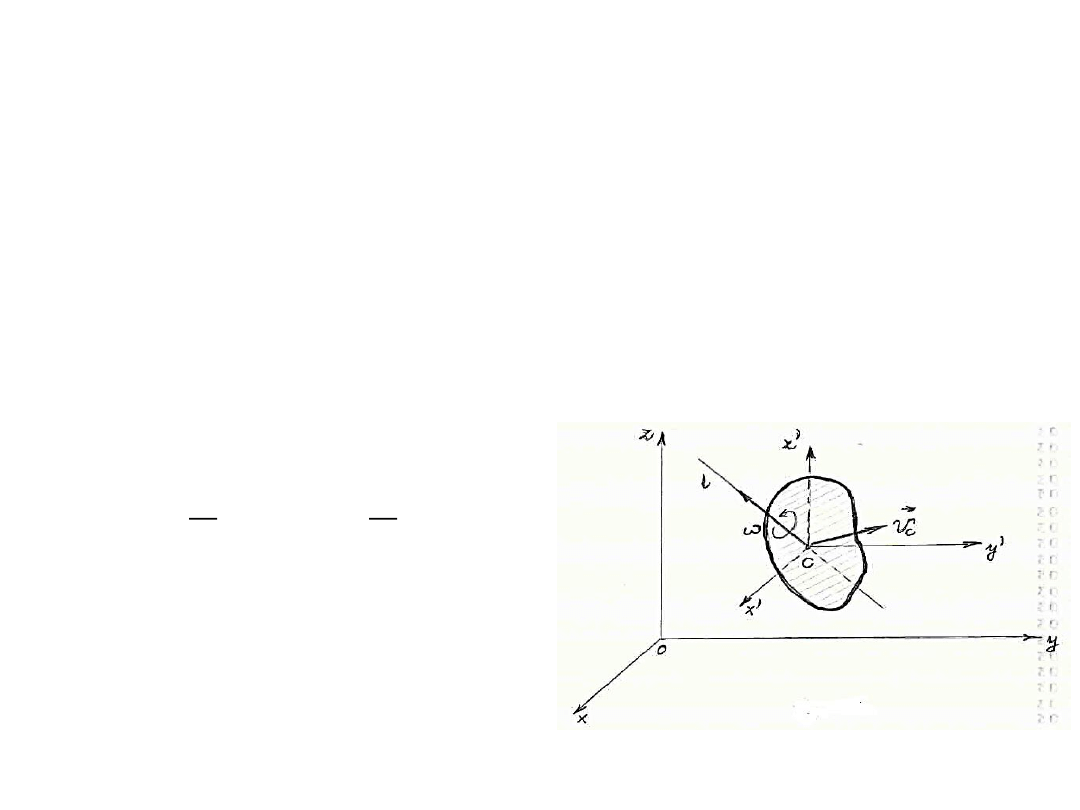
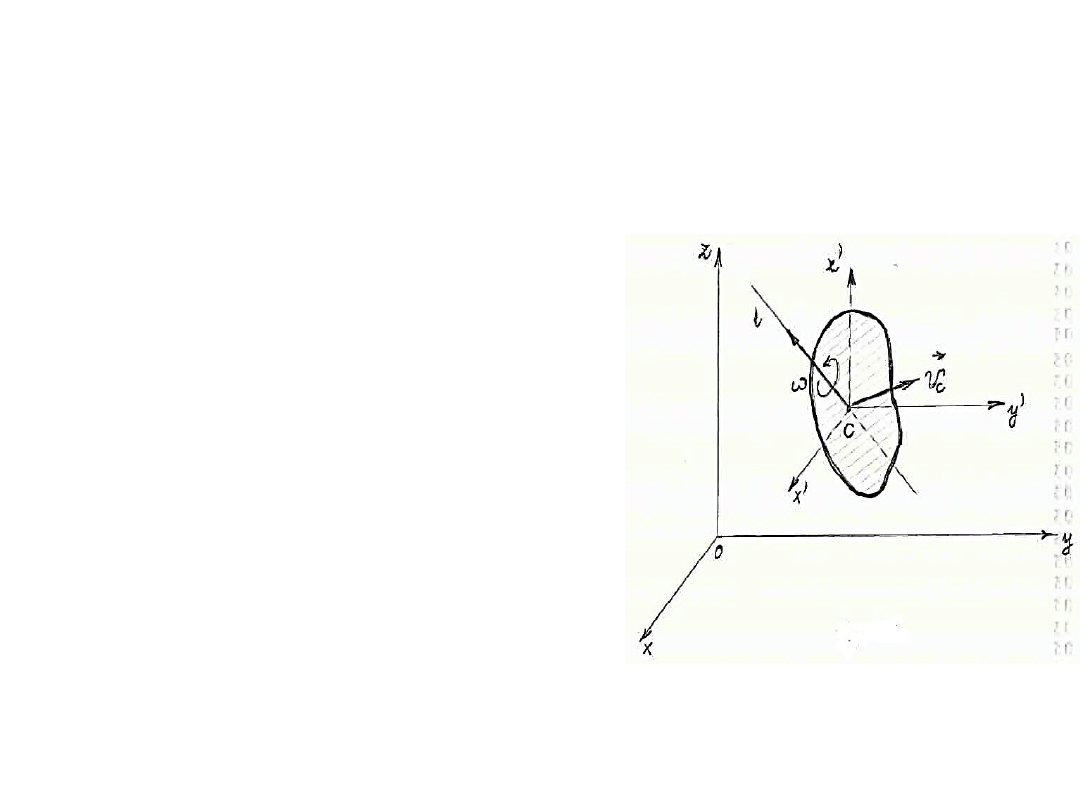
Wprowadźmy drugi układ odniesienia – Cx’y’z’ o początku w
środku masy układu C i poruszający się względem układu
Oxyz z prędkością środka masy υ
c
.
Prędkośd υ
i
punktu materialnego
rozważanego układu jest sumą
geometryczną prędkości υ
c
środka
masy i prędkości υ
i
’
punktu materialnego
względem ruchomego
układu odniesienia Cx’y’z’.
'
i
c
i
MT SS - w 12
40
Twierdzenie Koeniga
Energia kinetyczna układu punktów materialnych
równa jest sumie
energii kinetycznej, jaką miałby punkt materialny o masie
całego układu poruszający się z prędkością środka masy
oraz
energii kinetycznej tegoż układu w jego ruchu względem
środka masy.
n
i
i
i
c
m
m
T
1
2
2
2
'
2
1

MT SS - w 12
41
Dla układu punktów materialnych słuszne jest następujące
twierdzenie:
Przyrost energii kinetycznej układu punktów materialnych w
skooczonym przedziale czasu równy jest sumie prac, które
wykonały w tym samym czasie wszystkie siły zewnętrzne i
wszystkie siły wewnętrzne działające na rozpatrywany układ.
L
L
T
T
T
o
T – energia kinetyczna układu w czasie t,
T
o
– energia kinetyczna układu w czasie t
o
,
L – suma prac sił zewnętrznych,
L’ – suma prac sił wewnętrznych.
MT SS - w 12
42
Jeśli układ punktów materialnych porusza się w
zachowawczym polu sił, wówczas składowe prostokątne siły
P
i
możemy wyrazid w następujący sposób:
x
i
, y
i
, z
i
– współrzędne punktu materialnego, na który działa
siła P
i
,
V – energia potencjalna sił zewnętrznych.
.
,
,
i
i
i
i
i
i
z
V
P
y
V
P
x
V
P
z
y
x
n
n
n
z
y
x
z
y
x
z
y
x
V
V
,
,
,
,
,
,
,
,
,
2
2
2
1
1
1
MT SS - w 12
43
Suma prac elementarnych wszystkich sił określona jest
wzorem:
lub uwzględniając
otrzymujemy:
n
i
i
i
i
i
i
i
n
i
i
dz
P
dy
P
dx
P
L
dL
z
y
x
1
1
.
,
,
i
i
i
i
i
i
z
V
P
y
V
P
x
V
P
z
y
x
dV
dz
z
V
dy
y
V
dx
x
V
dL
n
i
i
i
i
i
i
i
1

MT SS - w 12
44
Tak więc suma prac elementarnych sił zewnętrznych równa
jest różniczce zupełnej energii potencjalnej ze znakiem
minus.
Całkując powyższe równanie znajdujemy pracę sił w
skooczonym przedziale czasu:
przy czym:
V
o
–
energia potencjalna w położeniu początkowym układu
,
V –
energia potencjalna układu w położeniu koocowym układu
.
V
V
L
o
MT SS - w 12
45
Założenie:
Badamy ruch układu punktów materialnych działają jedynie
siły zachowawcze.
Po podstawieniu do równania
pracy sił zewnętrznych L
i pracy sił wewnętrznych
otrzymujemy:
czyli:
L
L
T
T
T
o
V
V
L
o
'
'
'
V
V
L
o
'
'
V
V
V
V
T
T
o
o
o
'
'
o
o
o
V
V
T
V
V
T
ZASADA ZACHOWANIA ENERGII MECHANICZNEJ
dla układu punktów materialnych
Gdy na układ punktów materialnych działają siły zachowawcze,
wówczas suma energii kinetycznej i energii potencjalnej (sił
wewnętrznych i zewnętrznych) tego układu jest wartością stałą.
MT SS - w 12
46
Ciało doskonale sztywne
Zgodnie z twierdzeniem Koeniga, energia kinetyczna takkiego
ciała określimy jako:
Energia kinetyczna ciała sztywnego w ogólnym przypadku
ruchu równa jest sumie energii kinetycznej ruchu
postępowego z prędkością równą prędkości środka masy i
energii kinetycznej w chwilowym ruchu obrotowym ciała
względem jego środka masy.
m –
masa całkowita ciała sztywnego
,
I
l
–
moment bezwładności ciała
względem osi chwilowej l
,
ω –
chwilowa prędkośd kątowa ciała
.
2
2
2
1
2
1
l
c
I
m
T
MT SS - w 12
47
Ponieważ w ciele doskonale sztywnym wzajemne odległości
punktów nie ulegają zmianie, dlatego też praca sił
wewnętrznych
w
ciele
sztywnym
przy
dowolnym
przemieszczeniu tego ciała jest równe zeru.
Tak więc, ponieważ L’ = 0,
zatem dla ciała sztywnego
mamy:
Tw.
Przyrost energii kinetycznej ciała
sztywnego w skooczonym przedziale
czasu równy jest sumie prac,
które wykonały w tym samym czasie siły zewnętrzne
działające na to ciało.
L
T
T
T
o

MT SS - w 12
48
Zasada zachowania energii mechanicznej
dla ciała sztywnego
Gdy na ciało sztywne działają siły zachowawcze, wówczas
suma energii kinetycznej i energii potencjalnej sił
zewnętrznych jest wielkością stałą.
lub
const
V
T
V
T
V
T
o
o
Wyszukiwarka
Podobne podstrony:
mt ss w 15 2014 lato
mt ss w 11 2014 lato
fd ss w3 2014 lato
fd ss w2 2014 lato
fd ss w1 2014 lato
mt ss w 1 2014 lato
mt ss w 5 2014 lato
mt ss w 3 2014 lato
mt ss w 4 2014 lato
mt ss w 8 2014 lato
mt ss w 7 2014 lato
mt ss w 9 2014 lato
mt ss w 6 2014 lato
000 Alfabetyczny indeks zawodów do KZiS (Dz U 28 08 14,poz 1145)st 22 12 2014
Ściskanie sprawko 05 12 2014
Prezentacja SSSPZ 02 12 2014 MTomaszewska
więcej podobnych podstron