ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 1
PRZEKŁADNIE MECHANICZNE
Przekładnie mechaniczne są zwykle mechanizmami kołowymi
przeznaczonymi do przeniesienia napędu od wału silnika wykonującego ruch
obrotowy do członu napędowego maszyny roboczej, mechanizmu
wykonawczego lub wprost członu roboczego.
Przekładnie kołowe dzielimy:
- przekładnie zwykłe - przekładnie o osiach geometrycznych kół
nieruchomych względem podstawy. Rozróżniamy przekładnie zwykłe
szeregowe, równoległe, szeregowo-równoległe,
- przekładnie obiegowe lub inaczej planetarne - przekładnie o osiach
geometrycznych kół ruchomych względem podstawy. Rozróżniamy
przekładnie obiegowe proste, złożone, zamknięte.
W obliczeniach kinematycznych przekładni posługiwać się będziemy tzw.
przełożeniami kierunkowymi, które ogólnie można zapisać wzorem:
c
b
c
a
c
ab
i
ω
ω
=
(1)
gdzie: a, b – człony ruchome; a - napędzający (czynny) , b - napędzany
(bierny), c – człon nieruchomy
c
b
c
a
,
ω
ω
- prędkości kątowe członów czynnego a i biernego b przy
unieruchomionym członie c.
W dalszej części podręcznika te prędkości kątowe będziemy oznaczać
b
a
,
ω
ω
.
Przekładnie zwykłe
W przypadku analizy przekładni zwykłych nie ma potrzeby wprowadzania
pojęcia członu nieruchomego i wzór (1) można uprościć do postaci:
b
a
ab
i
ω
ω
=
lub
a
b
ba
i
ω
ω
=
(2)
Przełożenie kierunkowe
ab
i
przyjmujemy za ujemne
0
i
ab
<
, jeżeli
zwroty prędkości kątowych członu a i członu b są przeciwne. Jest to
przekładnia o zazębieniu zewnętrznym - przykład na Rys. 1.
Przełożenie kierunkowe
ab
i
przyjmujemy za dodatnie
0
i
ab
>
, jeżeli
zwroty prędkości kątowych tych członów są zgodne. Jest to przekładnia o
zazębieniu wewnętrznym - przykład na Rys. 2 .
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 2
Jeżeli moduł przełożenia kierunkowego
1
i
c
ab
>
, wówczas przekładnia słu-
ży do redukcji prędkości kątowej i jest nazywana reduktorem.
Jeżeli moduł przełożenia kierunkowego
1
i
c
ab
<
, wówczas przekładnia
służy do zwiększania prędkości kątowej i jest nazywana multiplikatorem.
Przełożenie przekładni można wyrazić za pomocą parametrów
geometrycznych kół uwzględniając podstawową zależność:
2
d
v
o
⋅
=
ω
(3)
gdzie:
v
o
– liniowa prędkość obwodowa wspólna dla obydwu
współpracujących kół,
s
m
d – średnica podziałowa koła zębatego lub średnica koła tocznego,
[ ]
m
ω
– prędkość kątowa koła,
[ ]
1
s
−
,
Jeżeli chcemy wyrażać przełożenie za pomocą prędkości obrotowej n to
należy dodatkowo uwzględnić zależność:
[ ]
1
s
30
n
60
n
2
−
⋅
=
⋅
=
π
π
ω
,
gdzie:
min
obr
n
.
Po uwzględnieniu powyższych związków wzór na przełożenie przekładni
zwykłej jest określony w następującej postaci:
a
b
b
a
b
a
ab
d
d
n
n
i
=
=
=
ω
ω
(4)
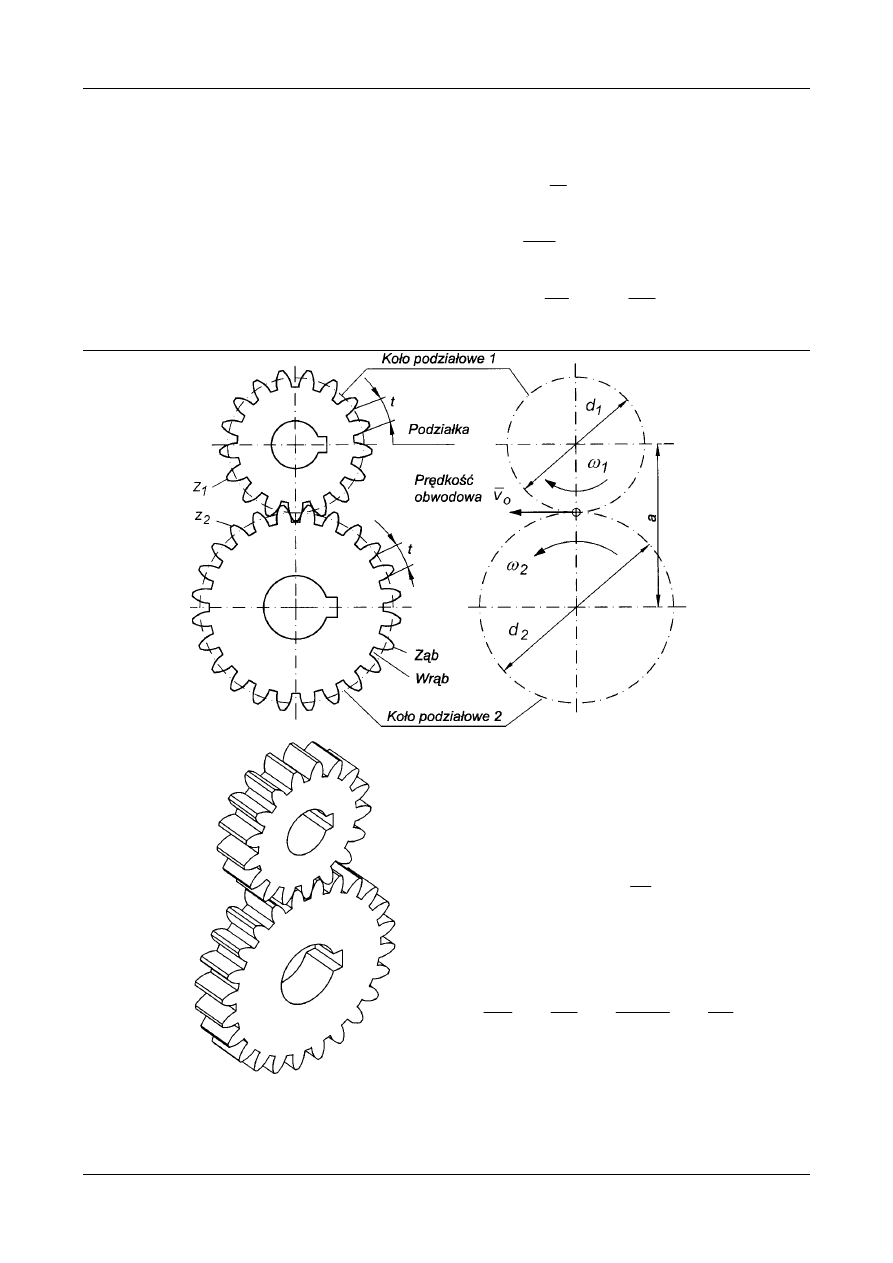
W przypadku przekładni zębatych, biorąc pod uwagę ich podstawowe
cechy geometryczne, wzory na przełożenie możemy wyrazić również jako
stosunki odpowiednich liczb zębów. Zależności geometryczne i kinematyczne
dla przekładni zębatej o zazębieniu zewnętrznym przedstawia Rys. 1.
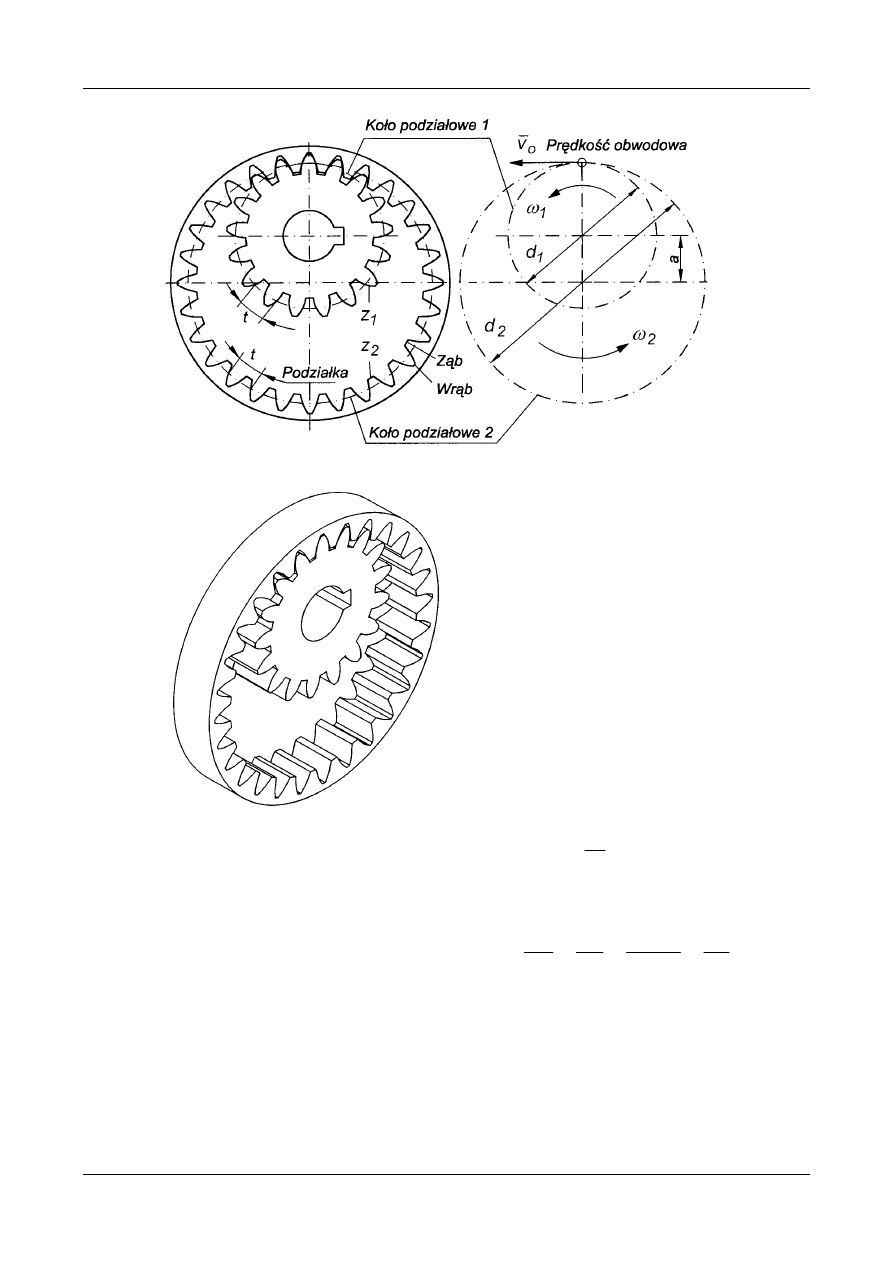
Analogiczne zależności dla przekładni zębatej o zazębieniu wewnętrznym
przedstawia Rys. 2.
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 3
Podstawowe zależności geometryczne i kinematyczne, wspólne dla oby-
dwu rodzajów przekładni:
moduł
π
t
m
=
(5)
średnica podziałowa
m
z
t
z
d
⋅
=
⋅
=
π
(6)
prędkość obwodowa
2
d
2
d
v
2
2
1
1
0
⋅
=
⋅
=
ω
ω
(7)
odległość osi pary kół:
2
m
)
z
z
(
a
1
2
⋅
+
=
(8)
przełożenie kierunkowe:
1
2
1
2
1
2
2
1
12
z
z
z
m
z
m
d
d
i
−
=
⋅
⋅
−
=
−
=
=
ω
ω
(9)
Rys. 1. Zależności geometryczne i kinematyczne dla przekładni zębatej o zazębieniu
zewnętrznym
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 4
odległość osi pary kół:
2
m
)
z
z
(
a
1
2
⋅
−
=
(10)
przełożenie kierunkowe:
1
2
1
2
1
2
2
1
12
z
z
z
m
z
m
d
d
i
=
⋅
⋅
=
=
=
ω
ω
(11)
Rys. 2. Zależności geometryczne i kinematyczne dla przekładni zębatej o zazębieniu
wewnętrznym
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 5
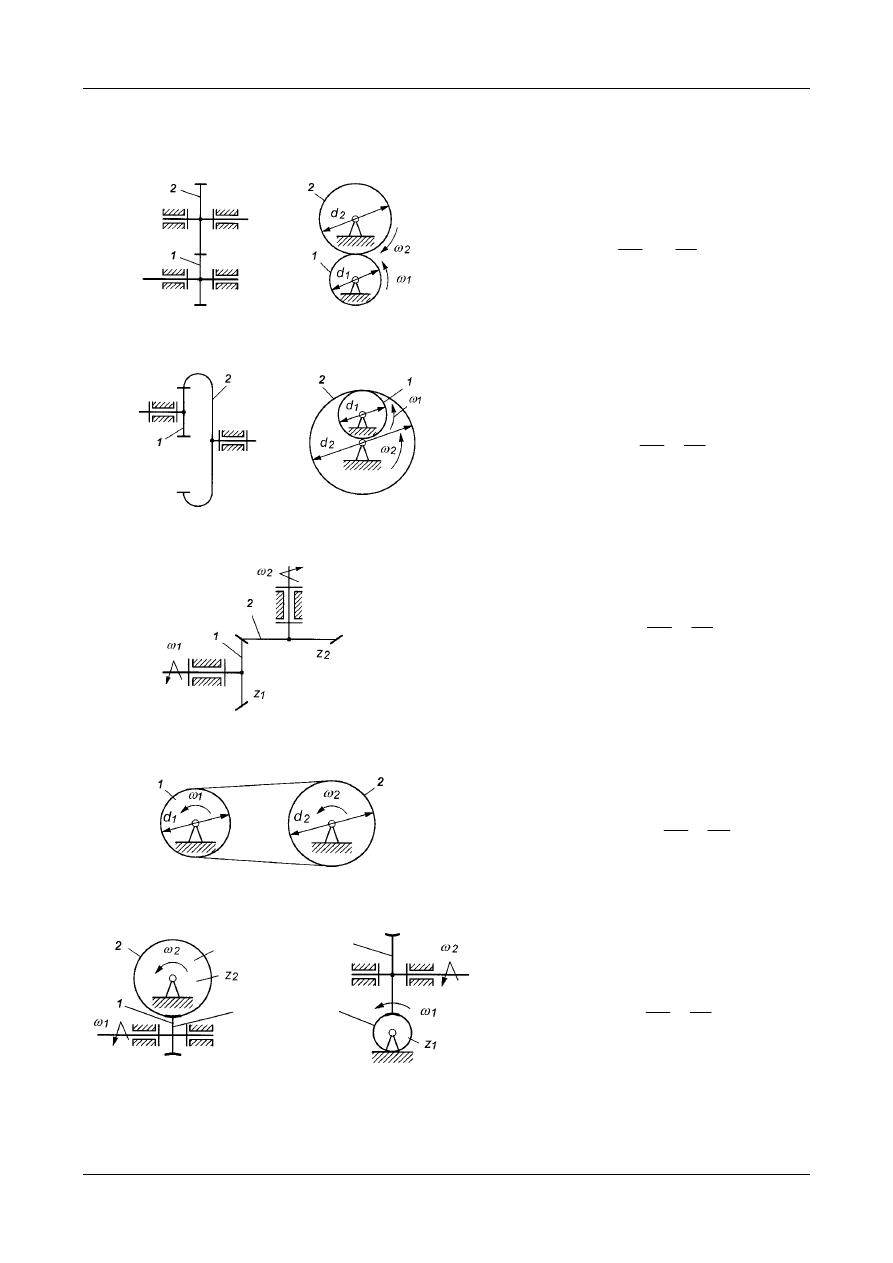
Schematy kinematyczne oraz przełożenia typowych przekładni kołowych podano
na Rys. 3 do 7.
z
z
i
1
2
2
1
12
−
=
=
ω
ω
(12)
Rys. 3. Przekładnia o zazębieniu zewnętrznym
z
z
i
1
2
2
1
12
=
=
ω
ω
(13)
Rys. 4. Przekładnia o zazębieniu wewnętrznym
z
z
i
1
2
2
1
12
=
=
ω
ω
(14)
W tym przypadku nie określa się znaku
przełożenia
Rys. 5. Przekładnia stożkowa
d
d
i
1
2
2
1
12
=
=
ω
ω
(15)
Rys. 6. Schemat przekładni cięgnowej, pasowej lub łańcuchowej
ślimacznica
ślimak
z
z
i
1
2
2
1
12
=
=
ω
ω
(
16)
gdzie:
1
z - zwojność ślimaka 1.
Także w tym przypadku nie określa się znaku przełożenia
Rys. 7. Przekładnia ślimakowa
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 6
Przekładnie obiegowe (planetarne)
Przekładnie obiegowe w odróżnieniu od przekładni zwykłych cechują się
tym, że środki niektórych kół zwanych dalej satelitami poruszają się po torach
kołowych wokół osi geometrycznej przekładni z tym, że środki tych torów leżą
w geometrycznej osi przekładni. Koła przekładni, których środki leżą w osi
przekładni nazywane są kołami centralnymi natomiast człon, na którym
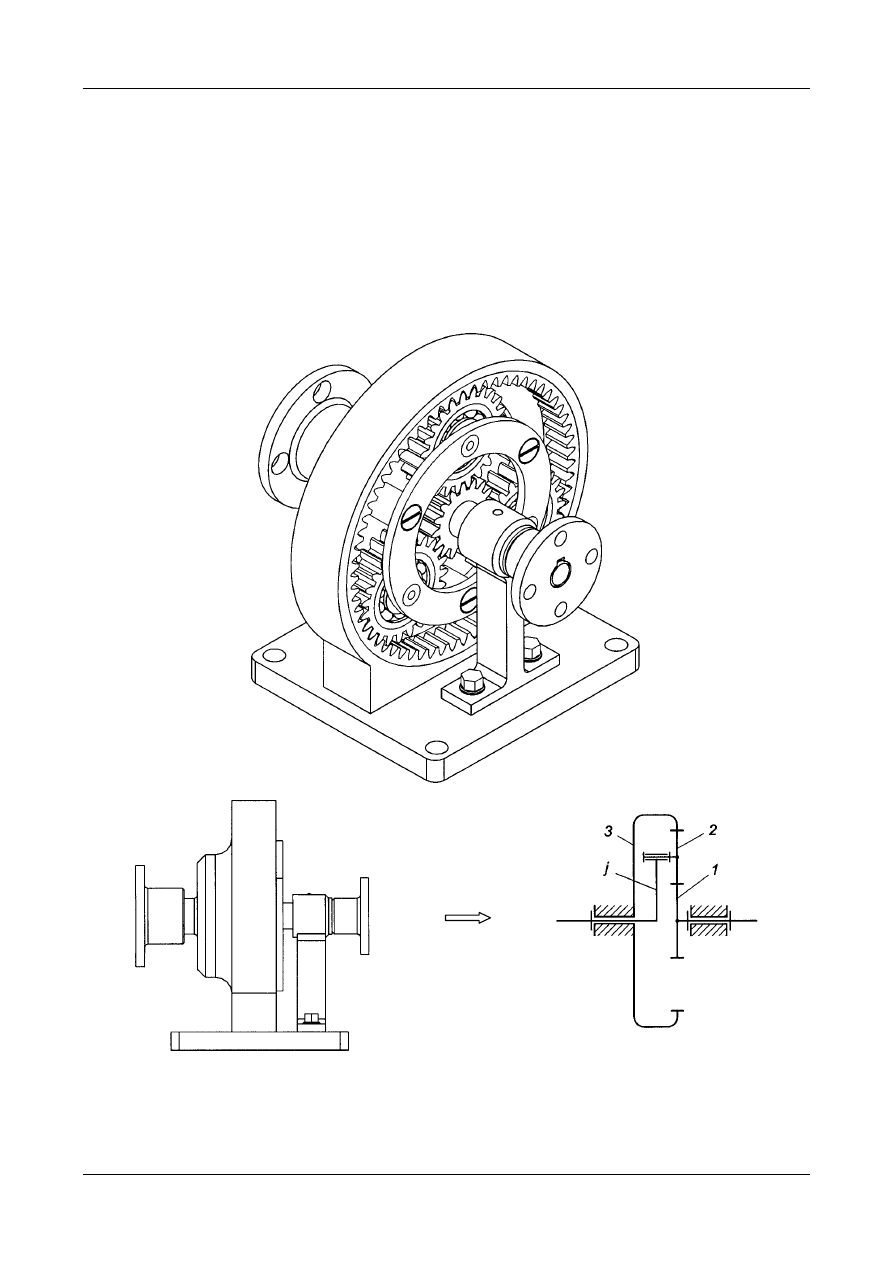
osadzone są satelity nazywa się jarzmem. Schemat konstrukcyjny
wybranego wariantu przekładni obiegowej przedstawiono na Rys. 8.
a)
b) c)
Rys. 8. Jednorzędowa przekładnia obiegowa:
a) i b) schemat konstrukcyjny, c) schemat kinematyczny
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 7
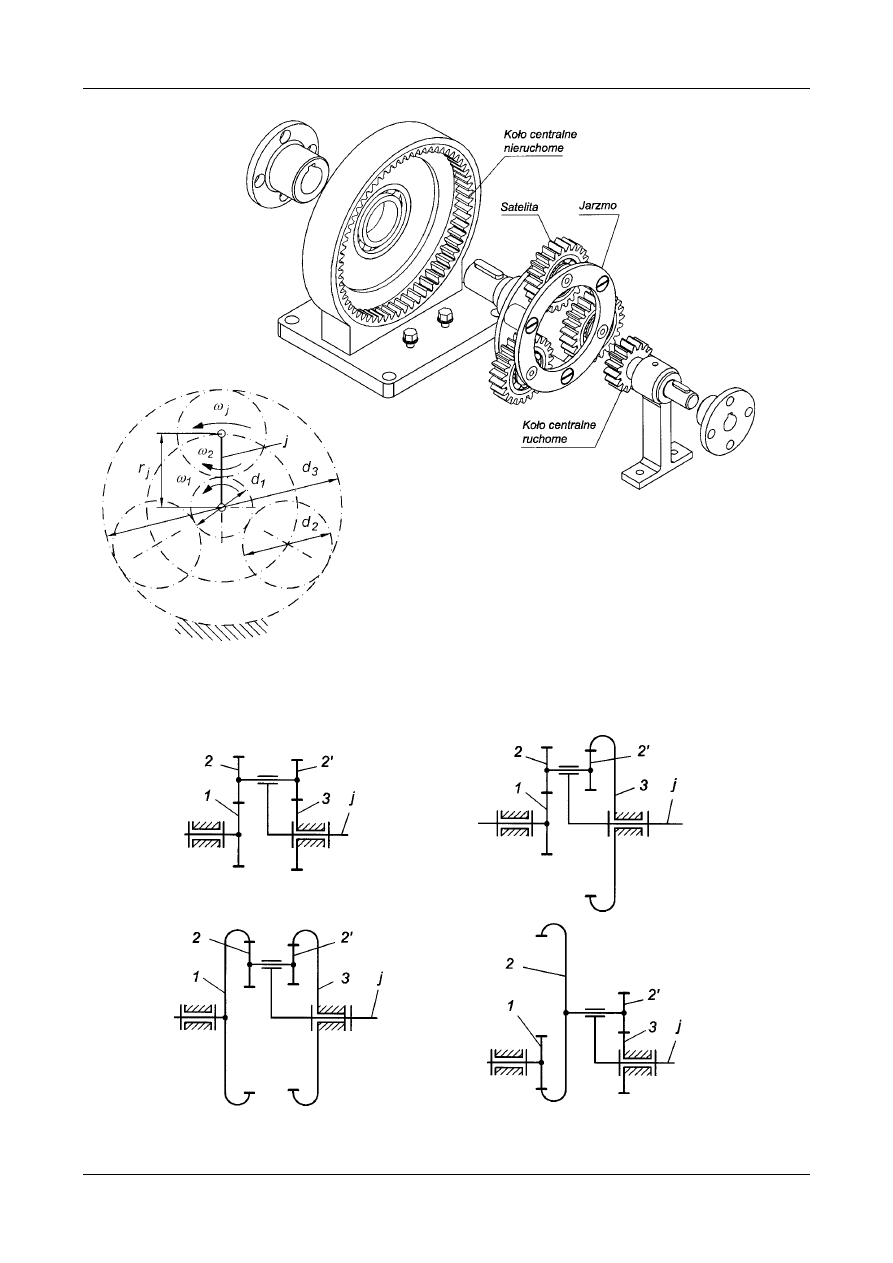
a)
b)
średnica podziałowa koła 3 wyznaczona na podstawie
warunku współosiowości:
2
1
3
d
2
d
d
+
=
liczba zębów koła 3 -
2
1
3
z
2
z
z
+
=
Rys. 9. Człony ruchome i nieruchome jednorzędowej przekładni obiegowej:
a) schemat konstrukcyjny, b) schemat obliczeniowy
Rys. 10. Warianty przekładni obiegowych dwurzędowych
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 8
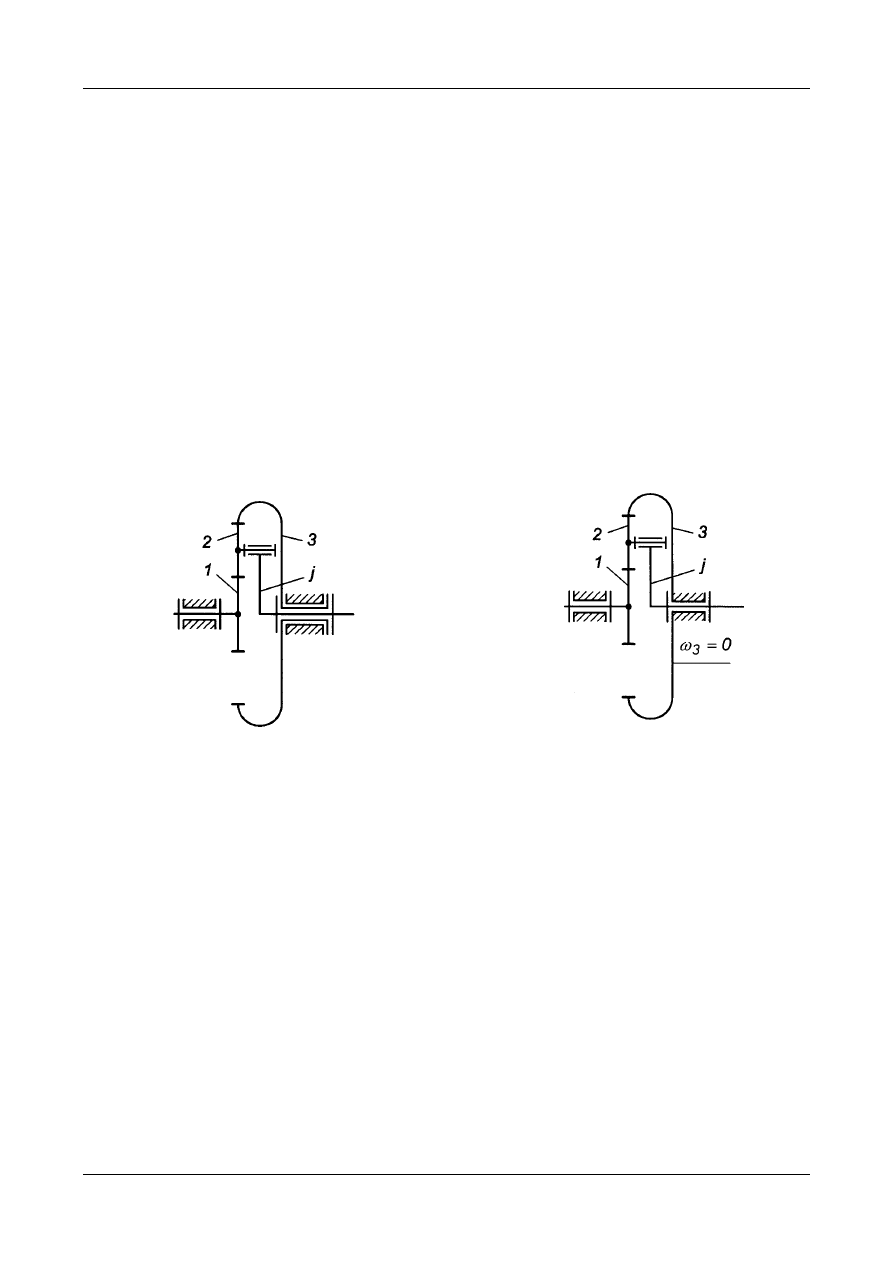
Analiza kinematyczna przekładni obiegowych
Przekładnie obiegowe mają w ogólnym przypadku dwa stopnie swobody:
w = 2, jak pokazano na Rys. 11a. Jeżeli jednak unieruchomimy względem
podstawy jeden z członów np. koło centralne lub jarzmo, to wówczas
przekładnia będzie posiadać jeden stopień swobody: w = 1. Przy tym należy
zauważyć, że przekładnia z unieruchomionym jarzmem nie jest już
przekładnią obiegową. Przekładnię obiegową o jednym stopniu swobody z
unieruchomionym kołem centralnym 3 przedstawia Rys. 11b.
Przekładnia obiegowa o dwóch stopniach swobody jest nazywana
przekładnią różnicową lub dyferencjałem
a) Przekładnia obiegowa o dwóch b) Przekładnia obiegowa o jednym
stopniach swobody stopniu swobody
n = 4 n= 3
p
4
= 2 p
4
= 2
p
5
= 4 p
5
= 3
w= 3n - p
4
- 2p
5
= 12 - 2 - 8 = 2 w= 3n - p
4
- 2p
5
= 9 - 2 - 6 = 1
1, 3 - koła centralne, 2 - satelita, j - jarzmo,
Rys. 11. Schematy kinematyczne jednorzędowej przekładni obiegowej:
a) przekładnia obiegowa o dwóch stopniach swobody, b) przekładnia
obiegowa o jednym stopniu swobody
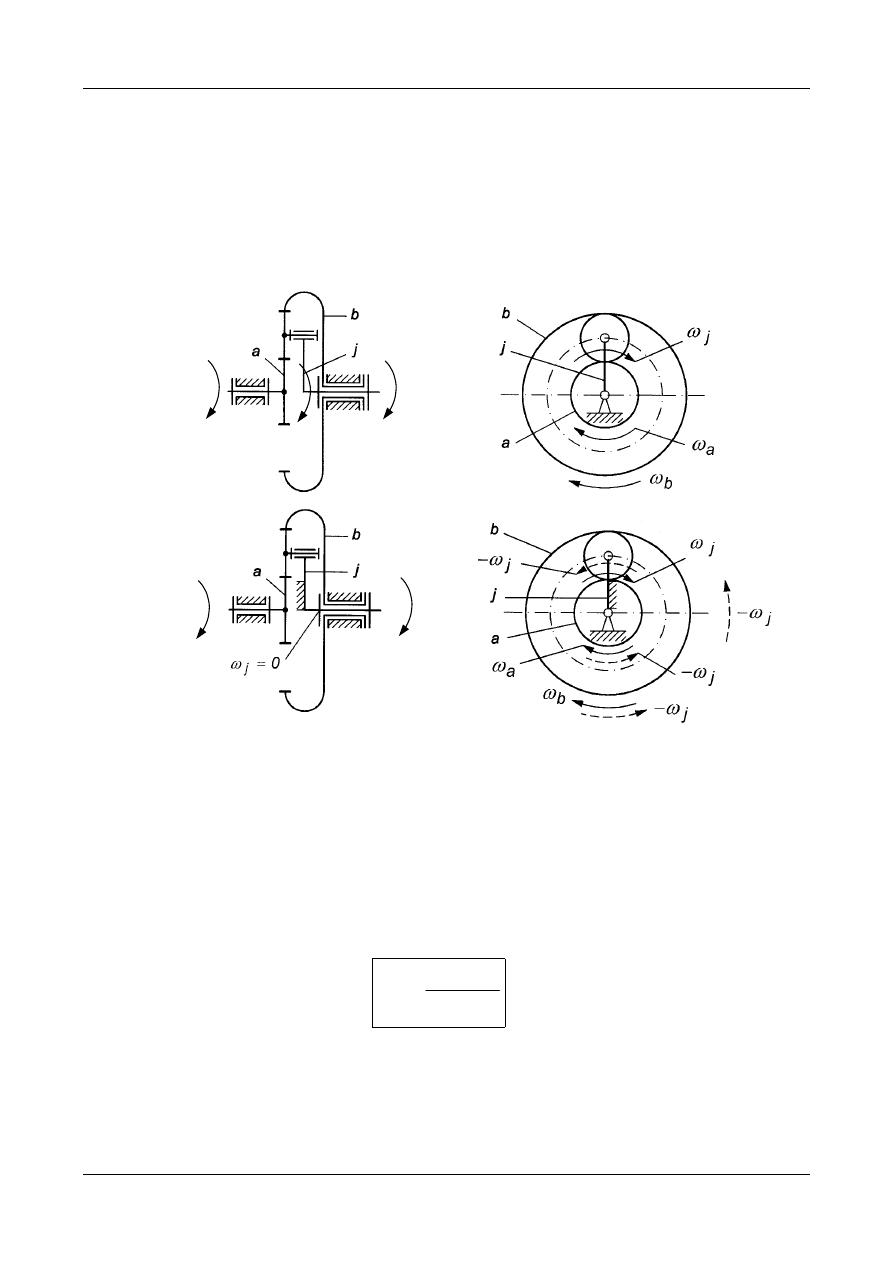
W celu wyznaczenia przełożenia przekładni obiegowej posłużymy się
schematami pokazanymi na Rys. 12, gdzie symbolami a i b oznaczone
zostały tzw. osiowe elementy przekładni obiegowej tj.
koła centralne,
natomiast przez j - oznaczono jarzmo. Na Rys. 12a pokazano prędkości
kątowe członów ruchomych tj.
a
ω
,
b
ω
i
j
ω
przekładni obiegowej w
przypadku kiedy posiada ona dwa stopnie swobody czyli dwa człony (np. a i
b) są członami czynnymi.
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 9
Przyjmiemy, że cała przekładnia została wprawiona w ruch z prędkością
kątową (
j
ω
−
). W takim przypadku prędkości kątowe kół centralnych a i b
zostaną pomniejszone o wartość (
j
ω
−
), natomiast jarzmo stanie się
nieruchome
0
j
j
=
−
ω
ω
, (Rys. 12b), co oznaczamy symbolicznie wiążąc na
rysunku dźwignię jarzma z podstawą.
a)
a
ω
j
ω
b
ω
b)
j
b
ω
ω −
Rys. 12. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi:
a) bezwzględne prędkości kątowe członów przekładni o dwóch stopniach swobody tj.
a
ω
,
b
ω
,
j
ω
, b) względne prędkości kątowe członów przekładni po nadaniu całej
przekładni prędkości kątowej (
j
ω
−
) tj.
j
a
ω
ω −
,
j
b
ω
ω
−
,
0
j
j
=
−
ω
ω
.
Przełożenie kierunkowe pomiędzy kołem a i kołem b przekładni przy
unieruchomionym w ten sposób jarzmie, zapiszemy w postaci zależności
zwanej wzorem Willisa:
j
b
j
a
j
ab
i
ω
ω
ω
ω
−
−
=
(17)
gdzie:
j
ab
i - przełożenie kierunkowe od członu a do b przy nieruchomym
jarzmie j.
j
a
ω
ω
−
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 10
Dla przekładni o jednym stopniu swobody, w której koło b jest nieruchome
0
=
b
ω
, natomiast koło a i jarzmo j są członami ruchomymi, Rys. (12b), wzór
Willisa przyjmie postać:
b
aj
j
a
j
j
a
j
b
j
a
j
ab
i
1
1
0
i
−
=
−
=
−
−
=
−
−
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
(18)
Zauważymy jednak, że w rzeczywistości poszukiwanym przełożeniem
przekładni o jednym stopniu swobody jest przełożenie pomiędzy kołem a i
jarzmem j przy nieruchomym kole b czyli
b
aj
i . Wyznaczymy to przełożenie
przekształcając wzór (18):
j
ab
b
aj
i
1
i
−
=
(19)
Zasadnicza zaleta przedstawionego powyżej sposobu rozumowania polega
na tym, że przełożenie przekładni o osiach ruchomych
j
a
b
aj
i
ω
ω
=
udało się
wyrazić za pomocą prostego wzoru, w którym występuje przełożenie
j
ab
i
.
Przełożenie to bardzo łatwo wyznaczyć ponieważ dotyczy przekładni
zwykłej szeregowej lub równoległej o osiach nieruchomych, powstałej
poprzez myślowe unieruchomienie jarzma oraz myślowe uruchomienie
koła
w rzeczywistości nieruchomego.
W analogiczny sposób można wyznaczyć przełożenie kierunkowe
przekładni w przypadku kiedy koło a jest kołem nieruchomym (
0
a
=
ω
),
natomiast koło b i jarzmo są członami ruchomymi.
j
ba
a
bj
i
1
i
−
=
(20)
Jak zauważymy we wzorach (19) i (20) następuje zamiana wskaźników
a, b oraz j. Sposób zamiany wskaźników podaje wzór:
j
ab
b
aj
b
ja
i
1
1
i
1
i
−
=
=
(21)
gdzie:
b
ja
i - przełożenie przekładni obiegowej (jarzmo j ruchome, indeks j u
dołu),
j
ab
i - przełożenie przekładni z myślowo unieruchomionym jarzmem j (indeks
j u góry).
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 11
Praktyczne wykorzystanie wzoru Willisa do obliczania przełożeń przekładni
obiegowych pokażemy na przykładach.
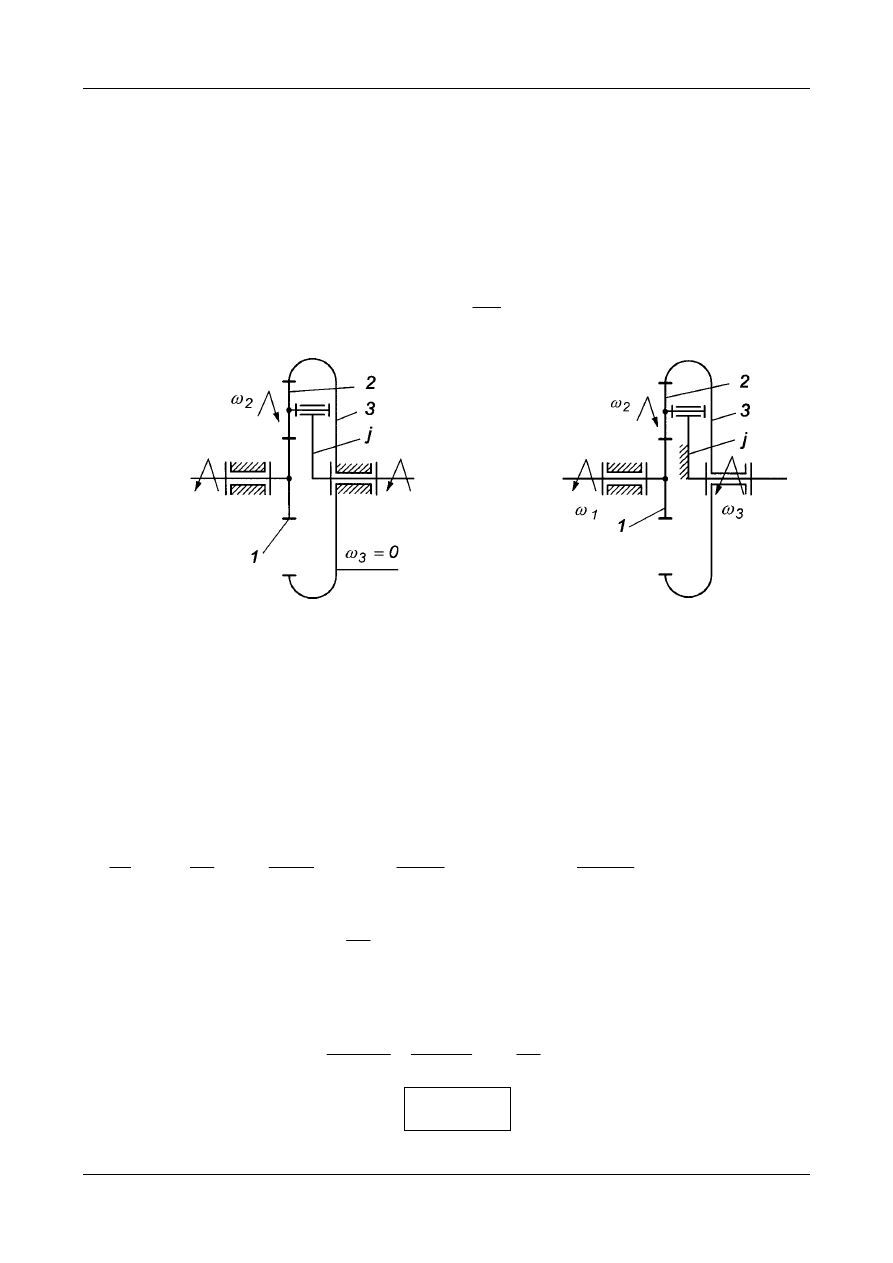
Przykład 1. Analiza kinematyczna jednorzędowej przekładni obiegowej
Schemat przekładni pokazano na Rys. 13.
Dane:
0
,
z
,
z
,
3
3
1
1
=
ω
ω
, ponieważ koło 3 jest członem nieruchomym.
Szukane: przełożenie przekładni
j
1
3
j
1
i
ω
ω
=
oraz
j
ω
,
2
ω
.
a) b)
we
1
ω
ω =
wy
j
ω
ω =
Rys. 13. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody
a) schemat kinematyczny przekładni o ruchomym jarzmie
b) schemat kinematyczny przekładni z unieruchomionym jarzmem
Jak zauważymy nie podano liczby zębów koła 2, gdyż wynika ona z tzw. warunku
współosiowości przekładni. Warunek ten określa związek geometryczny pomiędzy średni-
cami kół zębatych przekładni, które leżą w rozważanym przypadku w jednej płaszczyźnie,
mają wspólny moduł a ponadto dwa z nich mają wspólną oś obrotu.
Dla rozważanej przekładni obiegowej warunek współosiowości można zapisać:
2
d
d
2
d
3
2
1
=
+
;
2
z
m
z
m
2
z
m
3
2
1
⋅
=
⋅
+
⋅
czyli:
2
z
z
z
1
3
2
−
=
(P1.1)
Przełożenie przekładni
j
1
3
j
1
i
ω
ω
=
wyznaczymy korzystając ze wzoru
Willisa (17) przyjmując
0
3
=
ω
3
j
1
j
1
j
j
1
j
3
j
1
j
13
i
1
1
0
i
−
=
−
=
−
−
=
−
−
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
(P1.2)
Po przekształceniu otrzymamy:
j
13
3
j
1
i
1
i
−
=
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 12
Przełożenie
j
13
i
przekładni z myślowo unieruchomionym jarzmem z Rys. 13b wyzna-
czymy z prostych związków obowiązujących dla przekładni szeregowej o osiach nieru-
chomych.
1
3
2
3
1
2
3
2
2
1
j
13
z
z
z
z
z
z
i
−
=
+
⋅
−
=
⋅
=
ω
ω
ω
ω
(P1.3)
Ostatecznie przełożenie przekładni obiegowej wyniesie:
1
3
1
1
3
j
13
3
j
1
z
z
z
z
z
1
i
1
i
+
=
−
−
=
−
=
(P1.4)
Przełożenie
1
i
3
j
1
>
, co oznacza, że przekładnia jest reduktorem a ponadto zwroty pręd-
kości kątowych koła napędzającego 1 i jarzma j są zgodne. Poszukiwaną prędkość kąto-
wą
ω
j
wyznaczamy z prostego przekształcenia:
j
1
1
3
1
3
j
1
z
z
z
i
ω
ω
=
+
=
;
1
3
1
1
j
z
z
z
ω
ω
+
=
(P1.5)
Analizowaną przekładnię można również użytkować traktując jarzmo j jako człon napę-
dzający a człon 1 jako wyjściowy. Wówczas jej przełożenie wyniesie
:
z
z
z
i
1
i
3
1
1
3
j
1
3
1
j
+
=
=
(P1.6)
Przełożenie
1
i
0
3
1
j
<
<
oznacza, że taka przekładnia jest multiplikatorem.
W celu obliczenia prędkości kątowej satelity również wykorzystamy związki wynikające ze
wzoru Willisa:
3
j
2
j
2
j
j
2
j
3
j
2
j
23
i
1
1
0
i
−
=
−
=
−
−
=
−
−
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
(P1.7)
2
3
2
2
3
j
23
3
j
2
z
z
z
z
z
1
i
1
i
−
=
−
=
−
=
(P1.8)
Ponieważ
j
2
3
j
2
i
ω
ω
=
to
j
2
3
2
2
z
z
z
ω
ω
⋅
−
=
. Po podstawieniu uprzednio wyprowadzone-
go wzoru na prędkość jarzma
1
3
1
1
j
z
z
z
ω
ω
⋅
+
=
otrzymamy:
1
3
1
1
2
3
2
2
z
z
z
z
z
z
ω
ω
⋅
+
⋅
−
=
(P1.9)
Po podstawieniu
2
z
z
z
1
3
2
−
=
i prostych przekształceniach ostatecznie
otrzymamy wzór na prędkość kątową satelity:
1
1
3
1
2
z
z
z
ω
ω
⋅
−
−
=
.
Znak (-) w powyższym wzorze oznacza, że zwrot prędkości kątowej
satelity 2 jest przeciwny do zwrotu koła napędzającego 1.
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 13
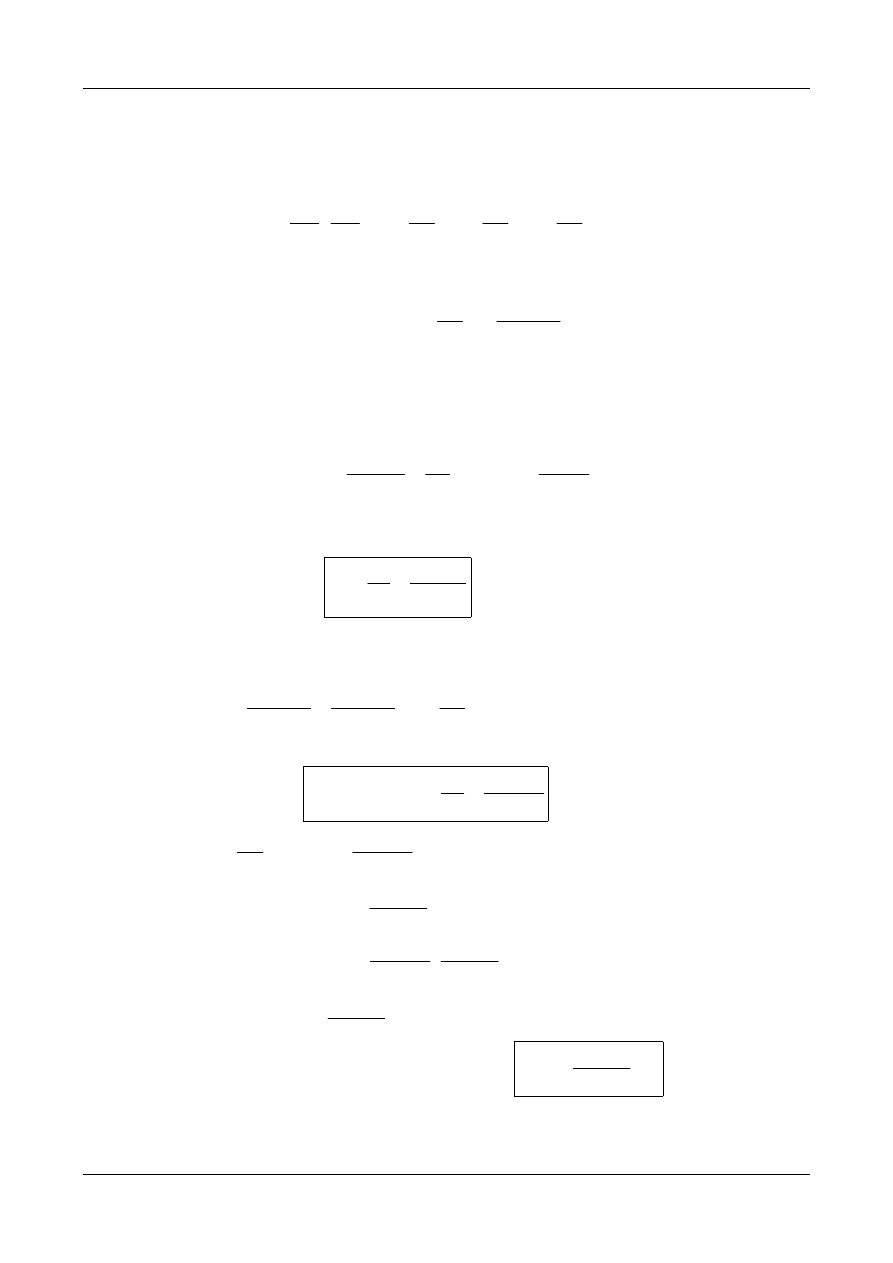
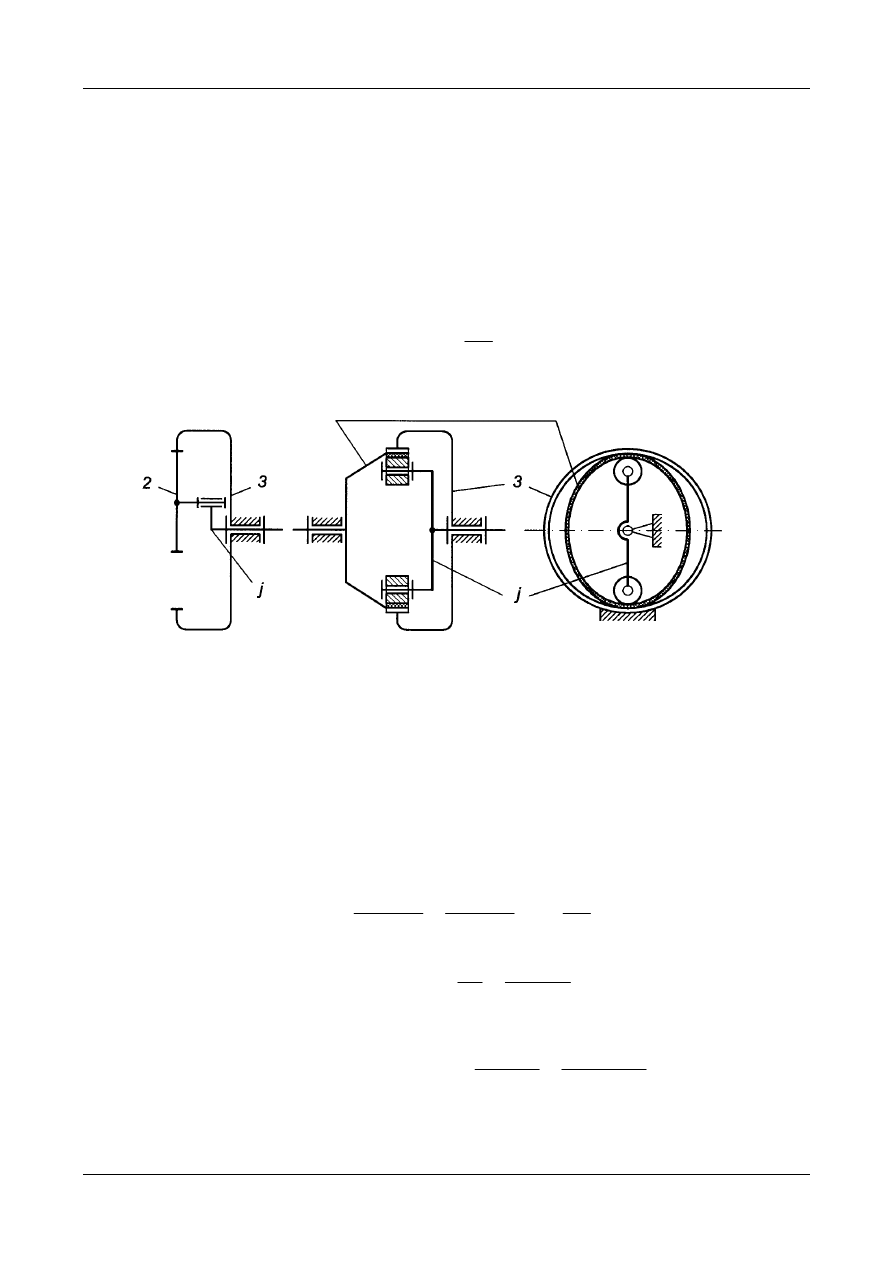
Przykład 2. Analiza kinematyczna przekładni falowej
Przekładnię falową pokazano na Rys. 14.
Dane:
100
z
2
=
,
102
z
3
=
,
członem napędzającym jest jarzmo j,
członem wyjściowym elastyczny pierścień zębaty 2 (w zwykłej przekładni
obiegowej jest to satelita, Rys.14a),
Obliczyć przełożenie przekładni:
2
j
3
2
j
i
ω
ω
=
.
Elastyczny pierścień zębaty 2
a) b)
Rys. 14. Schemat obliczeniowy i schemat kinematyczny przekładni falowej:
a) schemat obliczeniowy przekładni falowej,
b) schemat kinematyczny przekładni falowej
Przełożenie przekładni obliczamy podobnie jak przełożenie
j
23
i
w Przykła-
dzie 1 korzystając ze wzoru Willisa. W obliczeniach posługujemy się schema-
tem obliczeniowym (Rys. 14a).
3
j
2
j
2
j
j
2
j
3
j
2
j
23
i
1
1
0
i
−
=
−
=
−
−
=
−
−
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
(P2.1)
2
3
2
2
3
j
23
3
j
2
z
z
z
z
z
1
i
1
i
−
=
−
=
−
=
(P2.2)
Poszukiwane przełożenie wynosi:
50
102
100
100
z
z
z
i
3
2
2
3
2
j
−
=
−
=
−
=
ZAPIS I PODSTAWY KONSTRUKCJI MECHANICZNYCH Przekładnie Mechaniczne
Opracował: J. Felis Strona 14
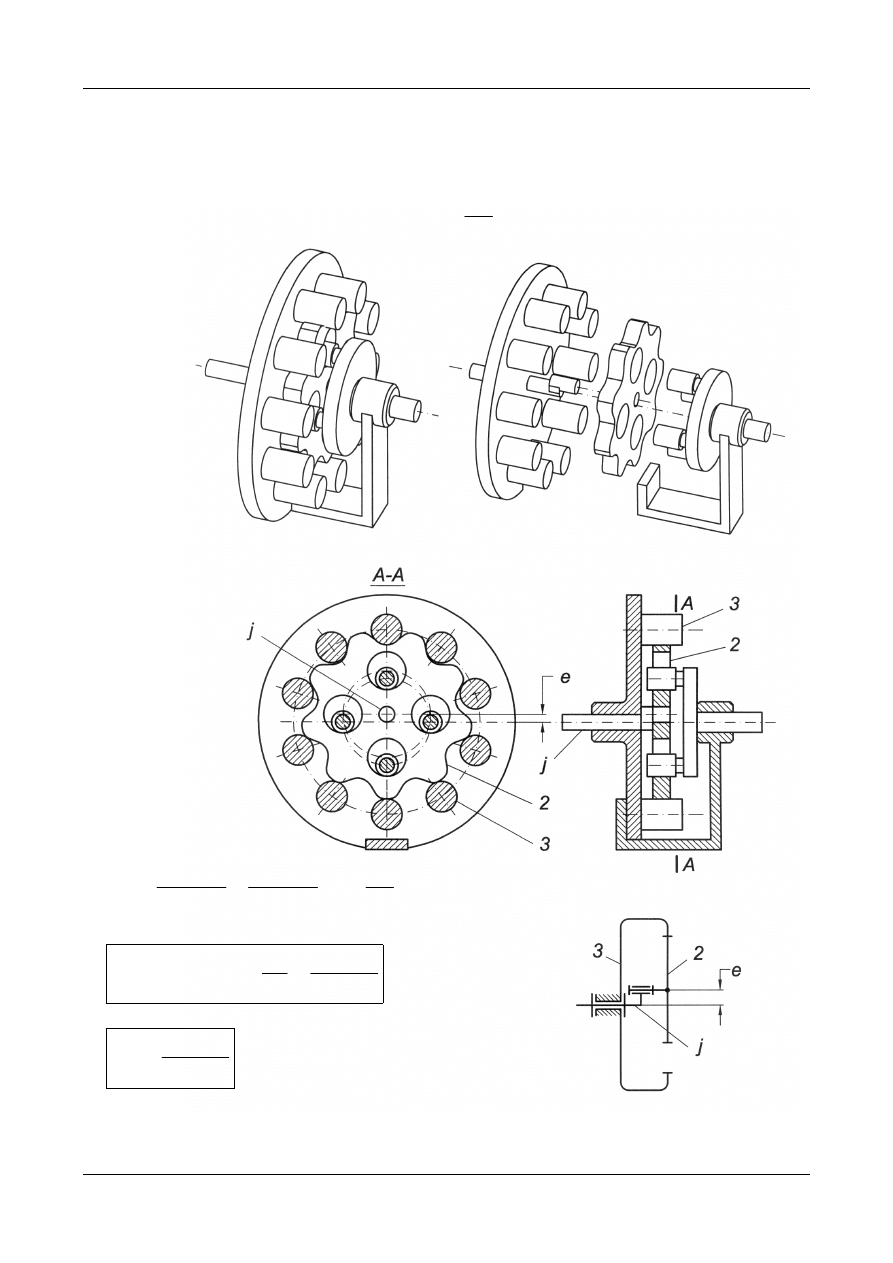
Przykład 3. Przekładnia kształtowo-toczna (cykloidalna)
Dane:
3
z
- liczba palców koła 3,
2
z
- liczba zębów cykloidalnych satelity 2
Obliczyć przełożenie przekładni:
2
j
3
2
j
i
ω
ω
=
.
0
3
=
ω
Przełożenie:
3
j
2
j
2
j
j
2
j
3
j
2
j
23
i
1
1
0
i
−
=
−
=
−
−
=
−
−
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
2
3
2
2
3
j
23
3
j
2
z
z
z
z
z
1
i
1
i
−
=
−
=
−
=
3
2
2
3
2
j
z
z
z
i
−
=
Rys. 15. Schematy konstrukcyjne i kinematyczne przekładni cykloidalnej
Wyszukiwarka
Podobne podstrony:
Projektowanie przekladnie id 40 Nieznany
zelbet www przeklej id 587207 Nieznany
6 Wyklad Przekladniki I id 4395 Nieznany (2)
PrzekladniePlanetarne id 404640 Nieznany
przekladnie cierne id 404815 Nieznany
Przekladnia falowa id 404650 Nieznany
przekladnia rysunek A1 id 40466 Nieznany
Przekladnie mechaniczne id 4047 Nieznany
Przekladnia zebata gotowa id 40 Nieznany
przekladnie zebate id 404821 Nieznany
przekladnie ciegnowe id 404814 Nieznany
PrzekladniaPasowa projekt id 40 Nieznany
przekladnie mechaniczne id 4048 Nieznany
Przekladnia pradowa SN id 40465 Nieznany
fizyka www przeklej pl id 17708 Nieznany
przekladnie cierne id 404815 Nieznany
więcej podobnych podstron