„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Mirosław Kowalski
Użytkowanie maszyn i urządzeń do zabezpieczania
wyrobisk 311[15].Z2.03
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Piotr Chudeusz
dr inż. Jacek Myszkowski
Opracowanie redakcyjne:
mgr inż. Romuald Stasik
Konsultacja:
mgr inż. Gabriela Poloczek
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[15].Z2.03
„Użytkowanie maszyn i urządzeń do zabezpieczania wyrobisk”, zawartego w modułowym
programie nauczania dla zawodu Technik górnictwa podziemnego.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
Wprowadzenie
3
2.
Wymagania wstępne
5
3.
Cele kształcenia
6
4.
Materiał nauczania
7
4.1. Pompy
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
18
4.1.3. Ćwiczenia
18
4.1.4. Sprawdzian postępów
19
4.2. Maszyny powietrzne
20
4.2.1. Materiał nauczania
20
4.2.2. Pytania sprawdzające
27
4.2.3. Ćwiczenia
28
4.2.4. Sprawdzian postępów
30
4.3. Napędy hydrostatyczne
31
4.3.1. Materiał nauczania
31
4.3.2. Pytania sprawdzające
35
4.3.3. Ćwiczenia
36
4.3.4. Sprawdzian postępów
37
4.4. Napęd elektryczny maszyn
38
4.4.1. Materiał nauczania
38
4.4.2. Pytania sprawdzające
42
4.4.3. Ćwiczenia
42
4.4.4. Sprawdzian postępów
43
5.
Sprawdzian osiągnięć
44
6.
Literatura
49

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu podstawowej wiedzy o użytkowaniu
maszyn i urządzeń stosowanych do zabezpieczania wyrobisk w górnictwie podziemnym,
przepisach, zasadach ich budowy i eksploatacji.
W poradniku zamieszczono:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
−
materiał nauczania – wiadomości teoretyczne niezbędne do opanowania treści jednostki
modułowej,
−
zestaw pytań, abyś mógł sprawdzić, czy już opanowałeś określone treści,
−
ć
wiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
sprawdzian osiągnięć, przykładowy zestaw zadań. Zaliczenie testu potwierdzi
opanowanie materiału całej jednostki modułowej,
−
literaturę uzupełniającą.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych
311[15].Z2
Eksploatacja maszyn i urządzeń
górniczych
311[15].Z2.01
Dobieranie maszyn do urabiania
i ładowania
311[15].Z2.02
Użytkowanie urządzeń
transportowych
311[15].Z2.03
Użytkowanie maszyn i urządzeń
do zabezpieczenia wyrobisk
311[15].Z2.04
Eksploatowanie układów
sterowania, sygnalizacji i łączności
311[15].Z2.05
Eksploatowanie urządzeń do
wzbogacania i przeróbki
mechanicznej kopalin
311[15].Z2.06
Użytkowanie sieci i urządzeń
elektrycznych w wyrobiskach
górniczych
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
stosować jednostki układu SI,
−
przeliczać jednostki,
−
posługiwać się podstawowymi pojęciami z zakresu elektrotechniki,mechaniki,
−
czytać rysunek techniczny,
−
rozróżniać podstawowe wielkości fizyczne i ich jednostki,
−
rozróżniać elementy obwodu elektrycznego,
−
odczytywać schematy prostych układów elektrycznych,
−
korzystać z różnych źródeł informacji,
−
obsługiwać komputer,
−
współpracować w grupie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
sklasyfikować i scharakteryzować urządzenia do zabezpieczania wyrobisk,
−
sklasyfikować pompy stosowane w kopalniach,
−
podłączyć pompę odwadniania,
−
scharakteryzować sprężarki i wentylatory, określać ich podstawowe parametry oraz
wykorzystanie w górnictwie podziemnym,
−
scharakteryzować zadania wentylatorów,
−
podłączyć wentylator,
−
scharakteryzować napędy elektryczne w urządzeniach do zabezpieczania wyrobisk,
−
scharakteryzować
napędy
hydrauliczne
i
pneumatyczne
w urządzeniach
do
zabezpieczania wyrobisk,
−
wskazać zastosowanie układów hydraulicznych i elektrohydraulicznych w maszynach
i urządzeniach do zabezpieczania wyrobisk,
−
scharakteryzować elementy układów hydrauliki siłowej,
−
wskazać zastosowanie urządzeń hydrauliki siłowej w górnictwie podziemnym,
−
scharakteryzować system energetyczny urządzeń do zabezpieczania wyrobisk,
−
obsłużyć maszyny do zabezpieczenia wyrobisk,
−
przeprowadzić konserwację zespołów maszyn do zabezpieczenia wyrobisk,
−
zastosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej
i ochrony środowiska przy obsłudze maszyn i urządzeń do zabezpieczenia wyrobisk,
−
określić zastosowanie napędów pneumatycznych w urządzeniach do zabezpieczenia
wyrobisk.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1.
Pompy
4.1.1.
Materiał nauczania
Klasyfikacja i podział pomp. Pompą nazywamy maszynę roboczą, która
z wykorzystaniem energii silnika napędowego przenosi ciecz z poziomu niższego na wyższy,
albo z przestrzeni o ciśnieniu niższym do przestrzeni o ciśnieniu wyższym, np. z otwartego
zbiornika do zbiornika zamkniętego. W działaniu pompy wykorzystuje się wytworzoną
różnicę ciśnień między przestrzenią ssawną, a tłoczną pompy za pomocą ruchomego elementu
roboczego (np. tłoka, wirnika) pompy.
Zależnie od sposobu działania rozróżniamy pompy:
−
objętościowe (wyporowe), których działanie polega na przetłaczaniu (wypieraniu) porcji
cieczy z przestrzeni ssawnej przez odpowiedni ruch elementu roboczego np. tłoka do
przestrzeni tłocznej;
−
przepływowe (wirowe i strumieniowe), których działanie polega na wykorzystaniu
warunków stałego równomiernego lub prawie równomiernego przepływu cieczy przez
przestrzeń wewnętrzną pompy.
W zależności od rodzaju ruchu elementu roboczego pompy objętościowe (wyporowe)
można podzielić na:
−
tłokowe, o ruchu postępowo–zwrotnym elementu roboczego (tłoka, nurnika),
−
rotacyjne, o obrotowym ruchu elementu roboczego.
Pompy tłokowe dzielimy na:
−
właściwe pompy tłokowe i nurnikowe,
−
pompy przeponowe.
Zależnie od warunków pracy dzielimy pompy na:
−
ssące, umieszczone ponad zwierciadłem cieczy w zbiorniku górnym;
−
tłoczące (zatopione), które znajdują się pod zwierciadłem cieczy w zbiorniku dolnym
i pracują z ciągłym, samoistnym napływem cieczy do pompy;
−
ssąco–tłoczące umieszczone ponad dolnym, ale pod górnym zwierciadłem cieczy
Zależnie od rodzaju napędu wyróżniamy pompy: napędzane ręcznie i z napędem
mechanicznym, poruszane przez silnik napędowy bezpośrednio lub przez przekładnię.
Pompa wraz z rurociągiem ssawnym i tłocznym tworzy układ pompowy. Zespół
współpracujących pomp nazywamy instalacją pompową.
Zasada działania pomp tłokowych
Pompy tłokowe jednostronnego działania wyposażone są w ruchomy element roboczy,
wytwarzający różnicę ciśnień między przestrzenią ssawną a tłoczną pompy, potrzebną do
wywołania ruchu cieczy. W pompie tłokowej elementem roboczym jest płaski tłok albo obły
tłok nurnikowy (nurnik)w pompie nurnikowej.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
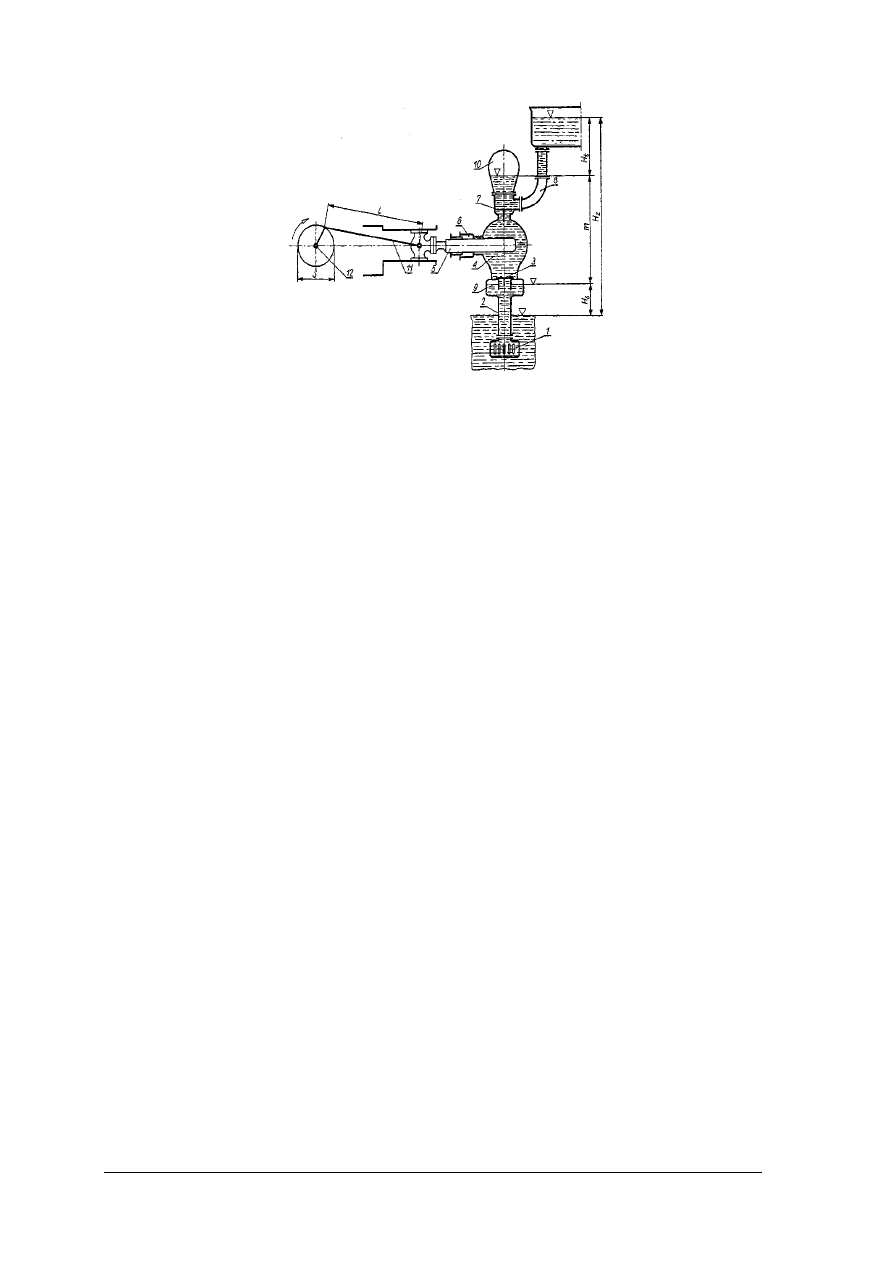
Rys. 1. Schemat pompy nurnikowej jednostronnego działania [4, s. 72]
1 – smok, 2 – rura ssawna, 3 – zawór ssawny, 4 – kadłub, 5 – nurnik, 6 – dławnica,
7 – zawór tłoczny. 8 – rura tłoczna, 9 – powietrznik ssawny,
10 – powietrznik tłoczny, 11 – mechanizm korbowy, 12 – wał korbowy
Rysunek 1 przedstawia schemat pompy nurnikowej ssąco–tłoczącej jednostronnego
działania (ponieważ woda znajduje się w niej po jednej stronie nurnika) z poziomą osią
nurnika. Podczas ruchu nurnika 5 w lewo (suw ssania) zwiększa się przestrzeń wewnątrz
kadłuba 4 pompy i powstaje w nim podciśnienie. Wskutek tego otwiera się samoczynnie
zawór ssawny 3 i pod działaniem ciśnienia atmosferycznego woda z dolnego zbiornika
wpływa przez smok 1 do rury ssawnej 2, a następnie wypełnia wnętrze kadłuba pompy.
Podczas ruchu nurnika w prawo (suw tłoczenia) w kadłubie pompy powstaje nadciśnienie
i wskutek tego zamyka się zawór ssawny, a otwiera samoczynny zawór tłoczny 7 i woda
wypychana przez nurnik wypływa przez rurę tłoczną 8 do zbiornika górnego. Dwa skrajne
położenia nurnika, w których następuje zmiana zwrotu ruchu, nazywamy położeniami
zwrotnymi. Przesunięcie nurnika między położeniami zwrotnymi nazywamy skokiem S
nurnika. Jeżeli nurnik jest poruszany za pomocą mechanizmu korbowego, to wykonuje dwa
suwy, wykonuje drogę o długości 2 S w czasie jednego obrotu wału korbowego. W pompie
jednostronnego działania jedno wytłaczanie wody przypada na dwa suwy nurnika. Efektem
tego, pompa dostarcza wodę w sposób nierównomierny, strumieniem przerywanym.
Uzyskanie bardziej równomiernego strumienia cieczy i biegu pompy stosuje się układ
bliźniaczy ( dwie pompy jednostronnego działania, o korbach na wspólnym wale, przesta-
wionych względem siebie pod kątem 180°) lub, co daje lepsze wyniki układ potrójny (trzy
pompy jednostronnego działania z korbami przestawionymi co 120°) Lepsze efekty (równy
bieg i równomierny strumień cieczy) uzyskuje się w pompie o obustronnym działaniu tłoka.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Rys. 2. Pompa nurnikowa stojąca obustronnego działania [4, s. 72]
Charakterystyka maszyn objętościowych
Pompy tłokowe należą do maszyn objętościowych, podobnie jak pompy rotacyjne oraz
sprężarki tłokowe i rotacyjne. Do maszyn objętościowych należą również tłokowe i rotacyjne
silniki cieplne, hydrauliczne i pneumatyczne. Cechą charakterystyczną, wspólną dla maszyn
objętościowych jest wyrównane ciśnienie, które działa na ruchomy element roboczy maszyny
(np. tłok). Ciśnienie zależy jedynie od położenia tłoka, zamykającego przestrzeń roboczą, i od
odpowiadającej temu położeniu objętości tłoczonej cieczy lub gazu. Działanie maszyny
objętościowej oparte jest na prawach statyki cieczy lub gazów. Przeciwieństwem maszyn
objętościowych są maszyny przepływowe (np. turbiny wodne).
Wysokość ssania. Geometryczną wysokością ssania H
s
pompy tłokowej nazywamy różnicę
poziomów: zwierciadła cieczy w powietrzniku ssawnym (lub poziomu gniazda zaworu
ssawnego) i zwierciadła cieczy w zbiorniku dolnym, wyrażoną w metrach (rys. 1).
Podczas suwu ssania ciśnienie p
s
na wlocie do pompy nie może obniżyć się poniżej ciśnienia
p
v
parowania podnoszonej cieczy w danej temperaturze. Gdyby tak się stało nastąpiłoby
rozerwanie słupa cieczy w rurze ssawnej i zjawisko kawitacji w cieczy. Dla prawidłowej
pracy musi być spełniony warunek:
p
s
> p
v
.
Największa możliwa do osiągnięcia wysokość ssania zależy od:
−
wartości zmiennego ciśnienia atmosferycznego,
−
ciężaru właściwego cieczy podnoszonej,
−
ciśnienia parowania cieczy podnoszonej,
−
zależnego od temperatury i rodzaju cieczy,
−
prędkości przepływu i bezwładności strugi,
−
lepkości cieczy i oporów przepływu.
Ciśnienie parowania cieczy wzrasta ze wzrostem temperatury, a więc im wyższa jest
temperatura cieczy, tym mniejsza jest wysokość ssania. Zwykle przy temperaturze wody
powyżej 70°C stosuje się pompy typu tłoczącego.
Wysokość tłoczenia. Geometryczną wysokością tłoczenia H
t
pompy tłokowej nazywamy
różnicę poziomów zwierciadła cieczy w zbiorniku górnym i w powietrzniku tłocznym
(rys. 1).
Wysokość podnoszenia. Geometryczną wysokością podnoszenia H
z
pompy nazywamy
różnicę poziomów zwierciadeł cieczy w zbiorniku górnym i dolnym (rys. 1),
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
H
z
= H
s
+m + H
t
gdzie m jest różnicą poziomów zwierciadeł w powietrzniku tłocznym i ssawnym.
Użyteczną wysokość podnoszenia H
u
można uważać za geometryczną wysokość
podnoszenia H
z
pompy powiększoną o sumę wysokości h
s
odpowiadających stratom
energetycznym podczas przepływu przez rurę ssawną i tłoczną oraz wysokości
odpowiadających różnicy ciśnienia między zbiornikami górnym i dolnym
[ ]
*
g
d
u
z
s
p
p
H
H
h
m
g
ρ
−
=
+ +
(oznaczenia – rys. 1)
Użyteczną wysokość podnoszenia można zmierzyć za pomocą manometru różnicowego
włączonego między wylotem a dolotem pompy. Użyteczna wysokość podnoszenia stanowi
bardzo ważny parametr pompy. Dla pomp objętościowych wysokość użyteczną ogranicza ją
moc
silnika
napędowego
oraz
wytrzymałość
i szczelność elementów pompy.
Wydajność. Wydajność teoretyczna (geometryczna) Q
th
pompy tłokowej jest to objętość
cieczy wypieranej przez tłok w jednostce czasu.
Wydajność rzeczywista Q
r
jest to średni strumień objętości cieczy w króćcu tłocznym pompy
przy określonej użytecznej wysokości podnoszenia. Wydajność rzeczywista jest zawsze
mniejsza od teoretycznej. Wydajność pompy wyraża się w m
3
/s. Stosunek wydajności
rzeczywistej do teoretycznej nazwa się sprawnością objętościową pompy.
th
v
r
Q
Q
η
=
3
/
60
r
v
n
Q
i A S
m
s
η
= ⋅ ⋅ ⋅
⋅
i = liczba czynnych stron w tłoku i=1 w pompie jednostronnego działania, i = 2 w pompie
dwustronnego działania;
S – skok tłoka w [m];
n – prędkość obrotowa wału korbowego [obr/min] n = 30–300 obr/min;
4
D
A
2
⋅
=
π
pole przekroju tłoka [m
2
], D = średnica tłoka w [m];
Sprawność objętościowa pompy nigdy nie osiąga wartości 1 (100%), na co wpływają
następujące czynniki:
−
nieszczelność tłoka, dławnic i zaworów, która powoduje straty cieczy;
−
opóźnione otwieranie się i zamykanie samoczynnych zaworów;
−
błędy konstrukcyjne w pompie,
−
nieszczelność rury ssawnej, która ułatwia przenikanie powietrza do pompy podczas suwu
ssania;
−
zawartość gazów i par w cieczy;
−
ś
ciśliwość cieczy i sprężystość ścianek pompy (przy dużej wysokości podnoszenia).
Sprawność objętościowa wodnych pomp tłokowych wynosi od 0,85 dla pomp małych do
0,99 dla pomp dużych.
Pompy rotacyjne. Elementy robocze pomp i innych maszyn rotacyjnych podczas
jednostajnego ruchu obrotowego zwiększają okresowo przestrzeń ssania, zmniejszając
jednocześnie przestrzeń tłoczną i na odwrót, wskutek czego następuje jednoczesne zasysanie
cieczy do wnętrza komory roboczej i wytłaczanie na zewnątrz. Elementy robocze stale
oddzielają przestrzeń ssawną od tłocznej, nie trzeba w tym przypadku stosować zaworów

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
sterujących. W pompach rotacyjnych ciecz jest pompowana porcjami (podobnie jak
w pompach tłokowych), więc podobnie jak w przypadku pomp tłokowych wydajność
chwilowa się zmienia, najczęściej jednak zmiany te są nieznaczne.
Zalety pomp rotacyjnych:
−
brak konieczności stosowania kłopotliwych w obsłudze powietrzników i zaworów
sterujących,
−
prosta konstrukcja,
−
małe rozmiary i mała masa,
−
niski koszt budowy,
−
szybkobieżność, która ułatwia sprzęganie z szybkobieżnymi tanimi silnikami,
−
dość dobra zdolność samozasysania pomp,
−
niewielki wpływ wysokości podnoszenia na wydajność,
−
możliwość pompowania dowolnych cieczy, nawet bardzo gęstych.
Wady pomp rotacyjnych:
−
niemożność pompowania cieczy zawierających twarde zanieczyszczenia (piasek, szlam),
ze względu na szybkie zużycie stykających się powierzchni elementów roboczych
i kadłuba oraz związane z tym znaczne obniżenie sprawności pompy.
Wydajność pomp rotacyjnych dochodzi do 500 m
3
/h, ciśnienie tłoczenia – aż do 100 MPa,
temperatura cieczy pompowanej –do 450°C, sprawność ogólna jest zbliżona do sprawności
pomp tłokowych. Współcześnie pompy rotacyjne mają bardzo duże zastosowanie jako pompy
olejowe do smarowania maszyn roboczych i silników, w napędach hydraulicznych, do cieczy
chłodzącej w obrabiarkach, do siłowników (serwomotorów) w automatyce przemysłowej.
Najczęściej stosowane rodzaje pomp rotacyjnych to:
−
pompy zębate,
−
ś
rubowe,
−
łopatkowe,
−
wielotłoczkowe.
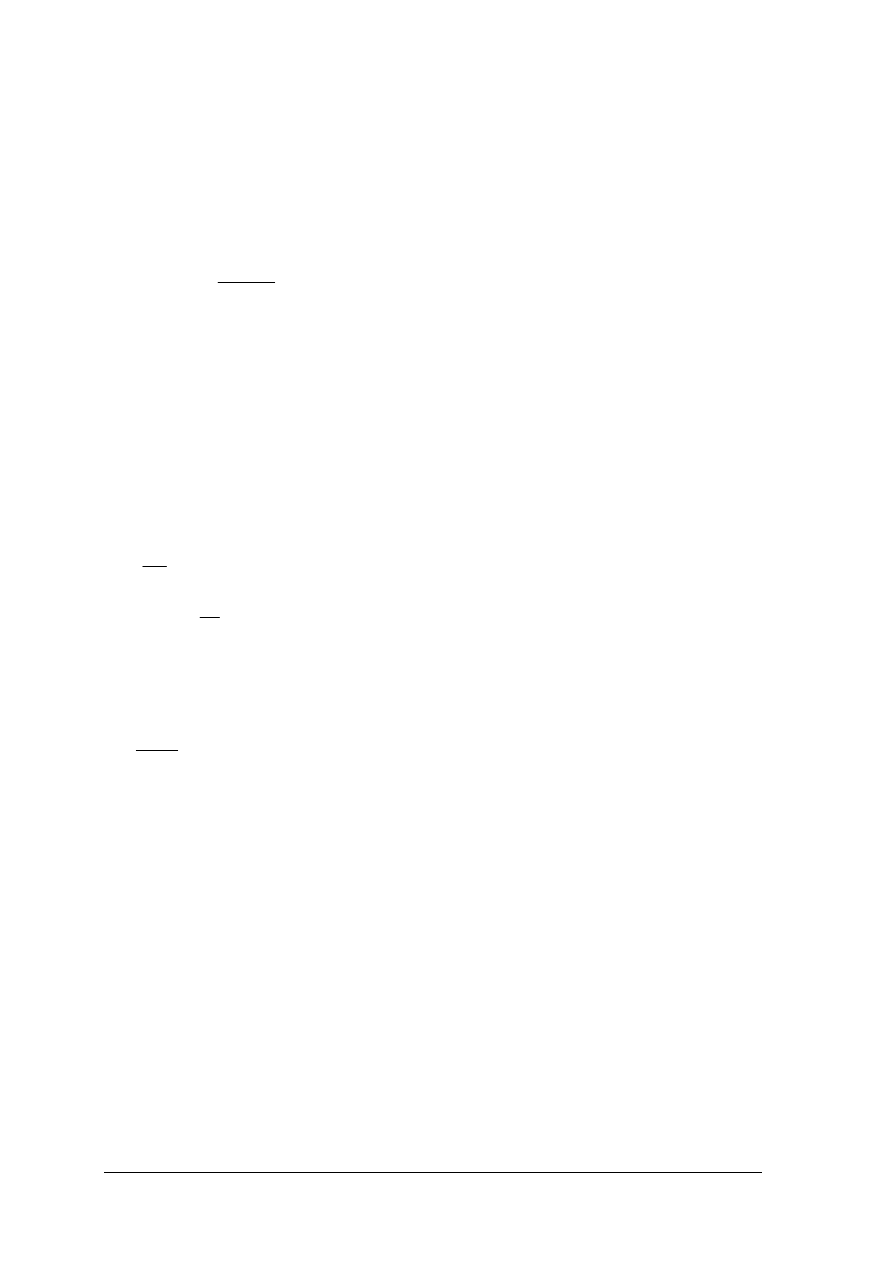
Pompy zębate. Pompy zębate mają elementy robocze w postaci dwóch kół zębatych
o zazębieniu zewnętrznym (rys. 3a), oddzielające przestrzeń ssawną od tłocznej wskutek styku
współpracujących zębów i małego luzu między wierzchołkami zębów a kadłubem. Koło
zębate napędzające (górne) obraca drugie koło zębate (dolne), najczęściej o takiej samej
liczbie zębów, a ciecz znajdująca się we wrębach międzyzębnych obu kół jest przetłaczana
wzdłuż wewnętrznej powierzchni kadłuba do przestrzeni tłocznej. Dla poprawnego, ciągłego
działania pompy, styk zębów powinien być nieprzerwany. Uzębienie jest korygowane,
o zarysie ewolwentowym. Buduje się również pompy o zazębieniu wewnętrznym, koła mogą
mieć zęby proste, skośne (śrubowe) lub daszkowe.
W pompach zębatych wysokociśnieniowych w celu zwiększenia sprawności pompy
stosuje się automatyczną kompensację luzów czołowych (rys. 3b); Wkładki przesuwne 5
z brązu są dociskane do powierzchni czołowej kół zębatych 7 pompy sprężynami oraz
wskutek działania ciśnienia cieczy pompowanej, która jest doprowadzana do przestrzeni 6
z przestrzeni tłocznej pompy. Pompy zębate są najczęściej napędzane przez silnik elektryczny
bezpośrednio albo za pomocą przekładni pasowej lub zębatej. Regulacji wydajności nie
stosuje się.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Rys. 3. Pompa zębata: a) przekroje pompy, b) automatyczne kompensacja luzów czołowych
l – koła zębate, 2 – dławnica, 3 – dolot. 4 – wylot, 5 – wkładka przesuwna,
6 – przestrzeń ciśnieniowa, 7 – koło zębate [4, s. 89]
Zaletami pomp zębatych są
−
niewielkie rozmiary i niewielka masa,
−
prostota konstrukcji i wykonania,
−
niezawodność działania,
−
trwałość,
−
szybkobieżność,
−
możliwość realizacji nawrotności biegu,
−
mała nierównomierność tłoczenia,
−
znaczna niezależność ciśnienia tłoczenia od wydajności.
Pompy zębate są stosowane wszędzie tam, gdzie nie jest wymagana regulacja wydajności
ale bardzo wysokie ciśnienie. Są one stosowane jako pompy olejowe i paliwowe, w napędach
hydraulicznych, w układach sterowania i automatyki przemysłowej, w hydraulice siłowej itp.
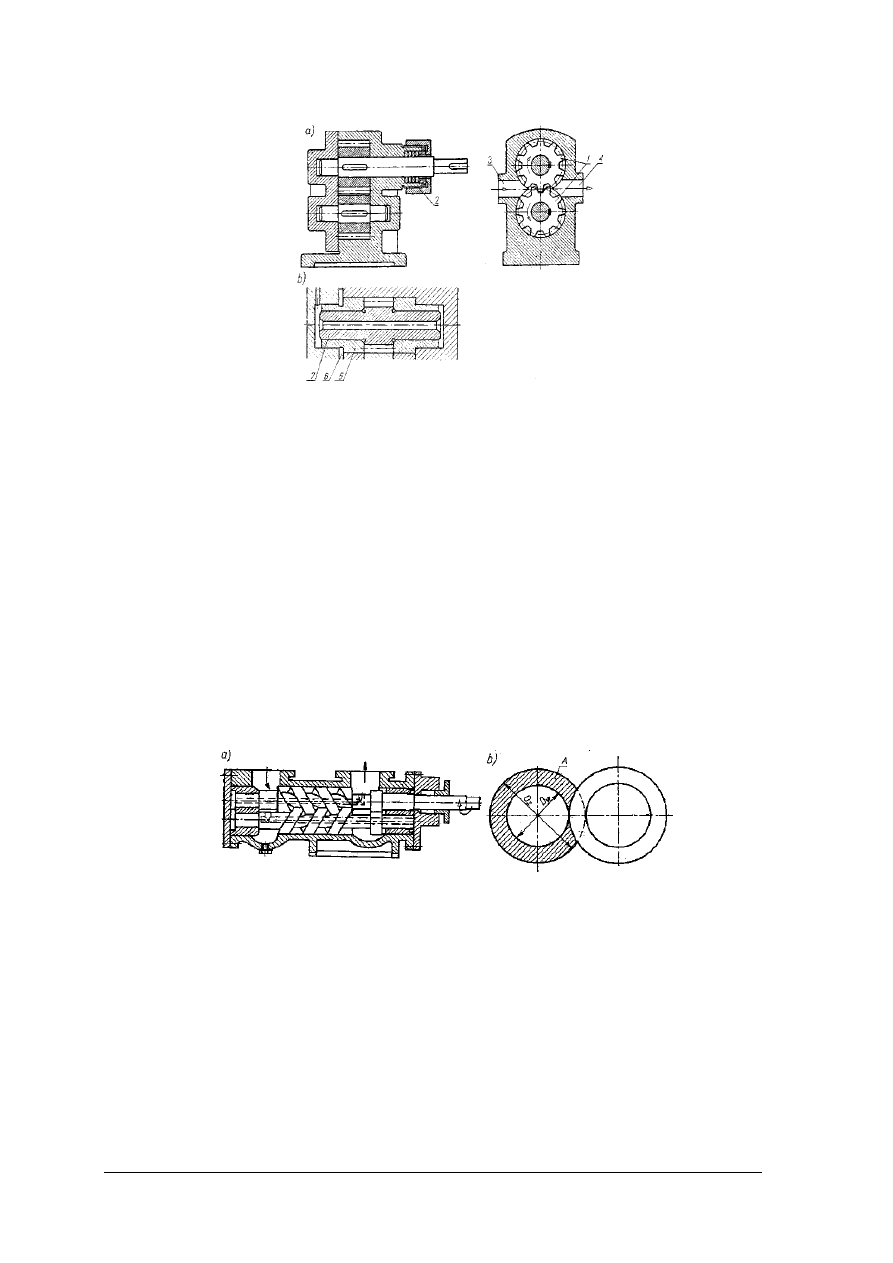
Rys. 4. Dwuwrzecionowa pompa śrubowa:
a) przekrój pompy, b) czynna powierzchnia śruby w pompie [4, s. 92]
Pompy śrubowe. Pompy śrubowe mają elementy robocze w postaci współpracujących ze
sobą dwóch lub trzech wrzecion z naciętymi zwojami śrubowymi o gwincie trapezowym,
osadzonych w wytłoczeniach kadłuba. Jedno wrzeciono jest robocze (napędzające), pozostałe
–bierne (napędzane). Przestrzenie robocze pompy są ograniczone współpracującymi ze sobą
zwojami wrzecion i ścianą kadłuba. Podczas obrotu wrzecion ich zwoje śrubowe, zazębiając
się, odcinają we wrębach pewną objętość cieczy, która zostaje przetłoczona przez wręby
wzdłuż osi wrzeciona. Ciecz przesuwa się, tak jakby stanowiła nakrętkę śruby. Wrzeciona
bierne obracają się wskutek działania ciśnienia cieczy na ich zwoje, rola ich polega więc
jedynie na uszczelnianiu pompy. Podstawowym warunkiem poprawnej pracy pompy śrubowej
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
jest duża szczelność zewnętrznej powierzchni wrzecion w wytłoczeniach kadłuba oraz
w międzyzębnych wrębach podczas ich zazębiania. Kierunek współpracujących zwojów jest
przeciwbieżny.
Zaletami pomp śrubowych są:
−
możliwość stosowania ich zarówno do cieczy czystych (woda, benzyna), jak i do cieczy
gęstych i zanieczyszczonych,
−
duża szybkobieżność,
−
mała masa i małe rozmiary,
−
niezawodność i cicha praca,
−
duża równomierność tłoczenia.
Do wad należą:
−
trudne wykonanie wrzecion śrubowych o specjalnym zarysie gwintu, zapewniającym
dużą szczelność,
−
duży napór wzdłużny w pompach wysokociśnieniowych, wymagający odciążania.
Zastosowanie: w gospodarce wodnej –do pompowania dużych objętości wody czystej lub
zanieczyszczonej piaskiem, w hydraulicznych napędach obrabiarek i układów automatyki itp.
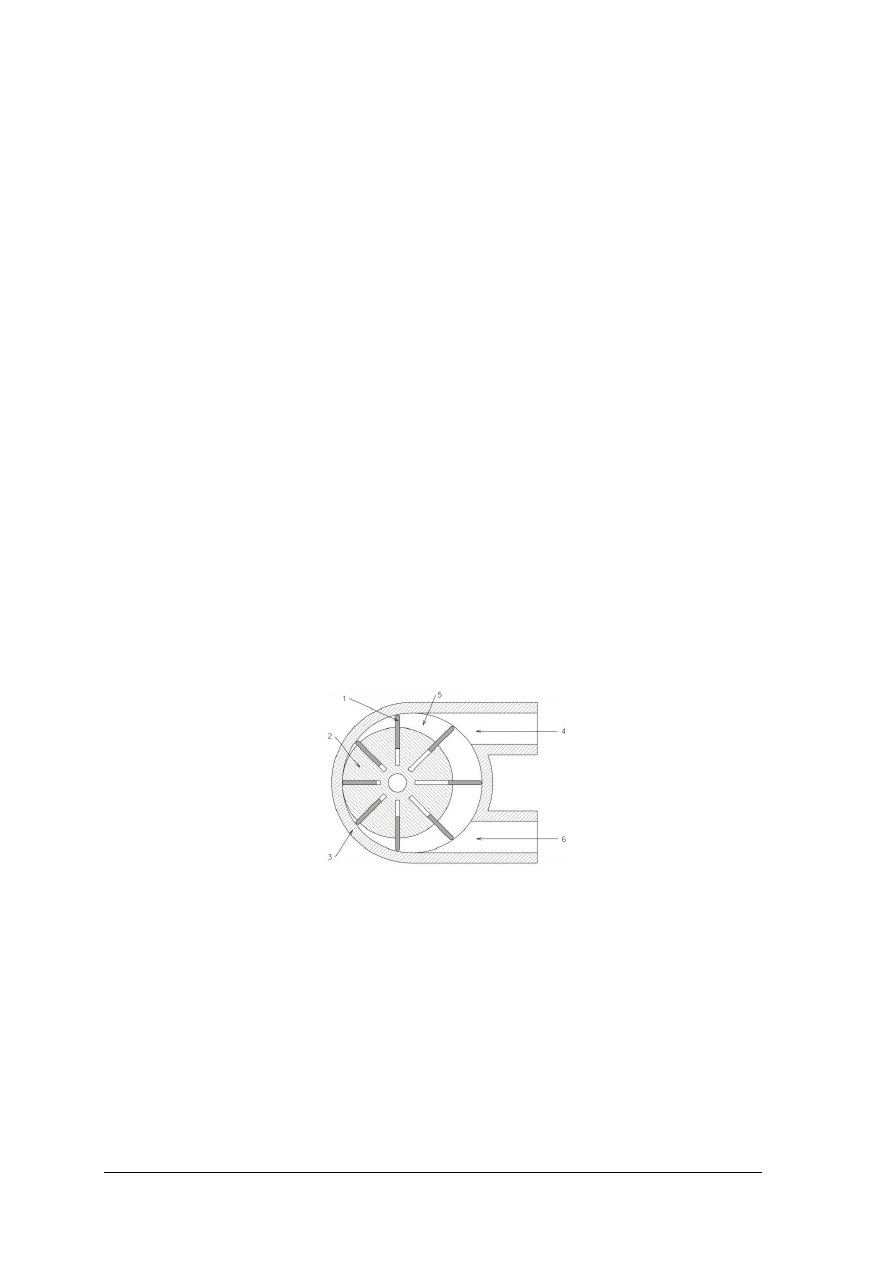
Pompy łopatkowe. Pompy łopatkowe są stosowane do pompowania jedynie cieczy
samosmarujących (olejów) ze względu na duże tarcie elementów ruchomych. Wirnik pompy
jednostronnego działania (rys. 5), osadzony mimośrodowo w kadłubie, ma szczeliny,
w których swobodnie przesuwają się stalowe łopatki. Podczas obrotu wirnika łopatki, są
dociskane do wewnętrznej części kadłuba siłą odśrodkową i wydzielają porcje cieczy,
przetłaczając je z przestrzeni ssawnej do tłocznej. Dodatkowy docisk łopatek do gładzi
kadłuba, z uwagi na szczelność ich styku z komorą pompy, uzyskuje się przez wprowadzenie
cieczy pod ciśnieniem w szczeliny pod łopatki lub przez zastosowanie sprężyn dociskających
łopatki. Pompy te mają zwykle 8 do 12 łopatek.
Rys. 5. Zasada działania pompy łopatkowej [www.wikipedia.pl]
Zasadę działania pompy łopatkowej pokazuje rysunek 5. Łopatki (1) osadzone są
w wirniku (2), który jest umiejscowiony mimośrodowo wewnątrz korpusu pompy (3).
W czasie obrotu wirnika, łopatki zagarniają ciecz z komory ssawnej (4) do przestrzeni
międzyłopatkowej (5) przenosząc ją do komory tłocznej pompy (6).
Pompy wirowe. Charakterystyka maszyn przepływowych. Pompy wirowe należą do
roboczych maszyn przepływowych, podobnie jak inne wirowe maszyny robocze
o analogicznej budowie i zasadzie działania jak np. sprężarki, dmuchawy, wentylatory i inne.
Do maszyn przepływowych należą także: silniki odrzutowe, pompy i sprężarki strumieniowe.
Działanie maszyn przepływowych wykorzystuje prawa dynamiki cieczy lub gazów.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
Zasada działania i klasyfikacja pomp wirowych. W maszynie wirowej (w pompie,
sprężarce itp.) elementem roboczym jest wirnik z łopatkami. Ze względu na kierunek
przepływu czynnika możemy podzielić maszyny wirowe na:
−
promieniowe,
−
osiowe,
−
skośne,
a maszyny promieniowe i skośne na:
−
odśrodkowe,
−
dośrodkowe.
Z uwagi na kształt wirnika rozróżniamy:
−
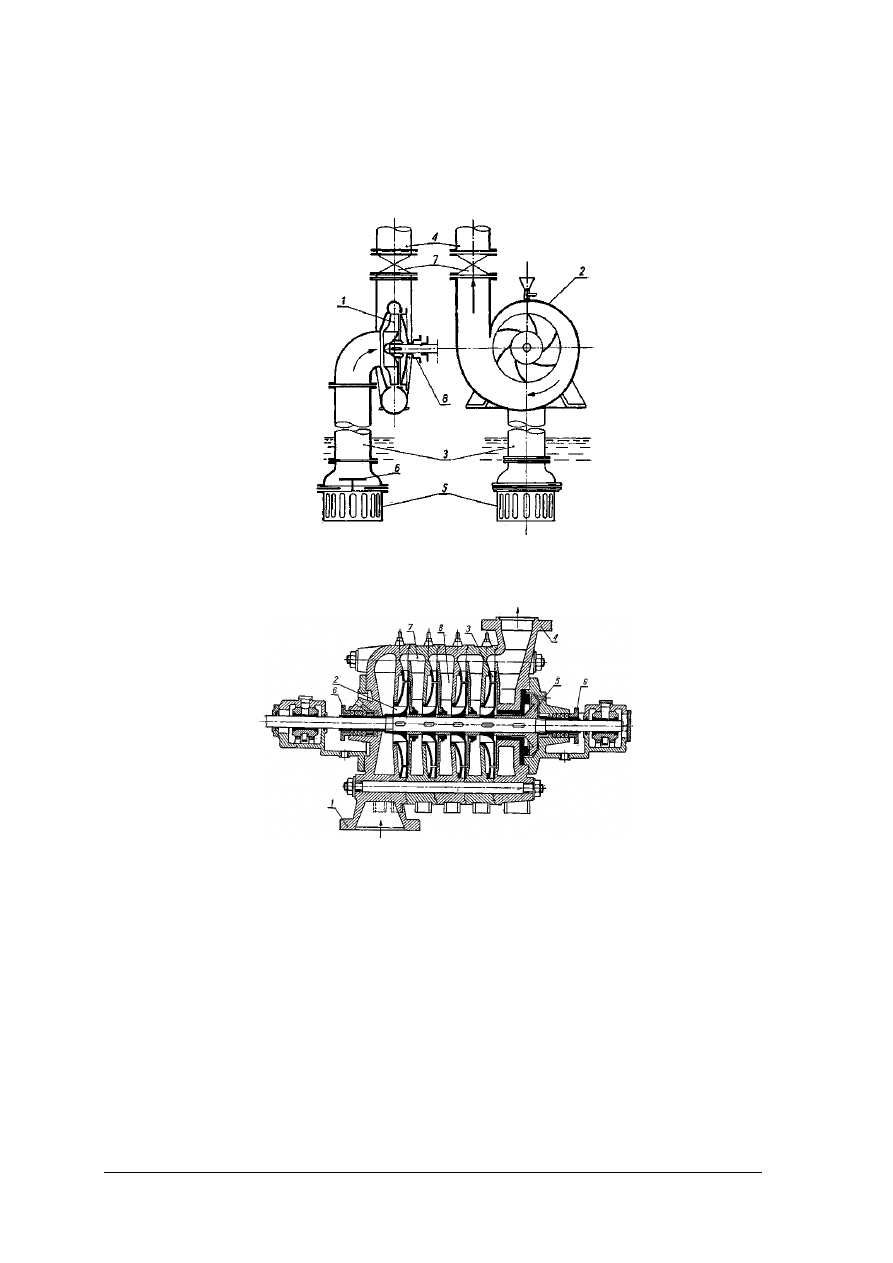
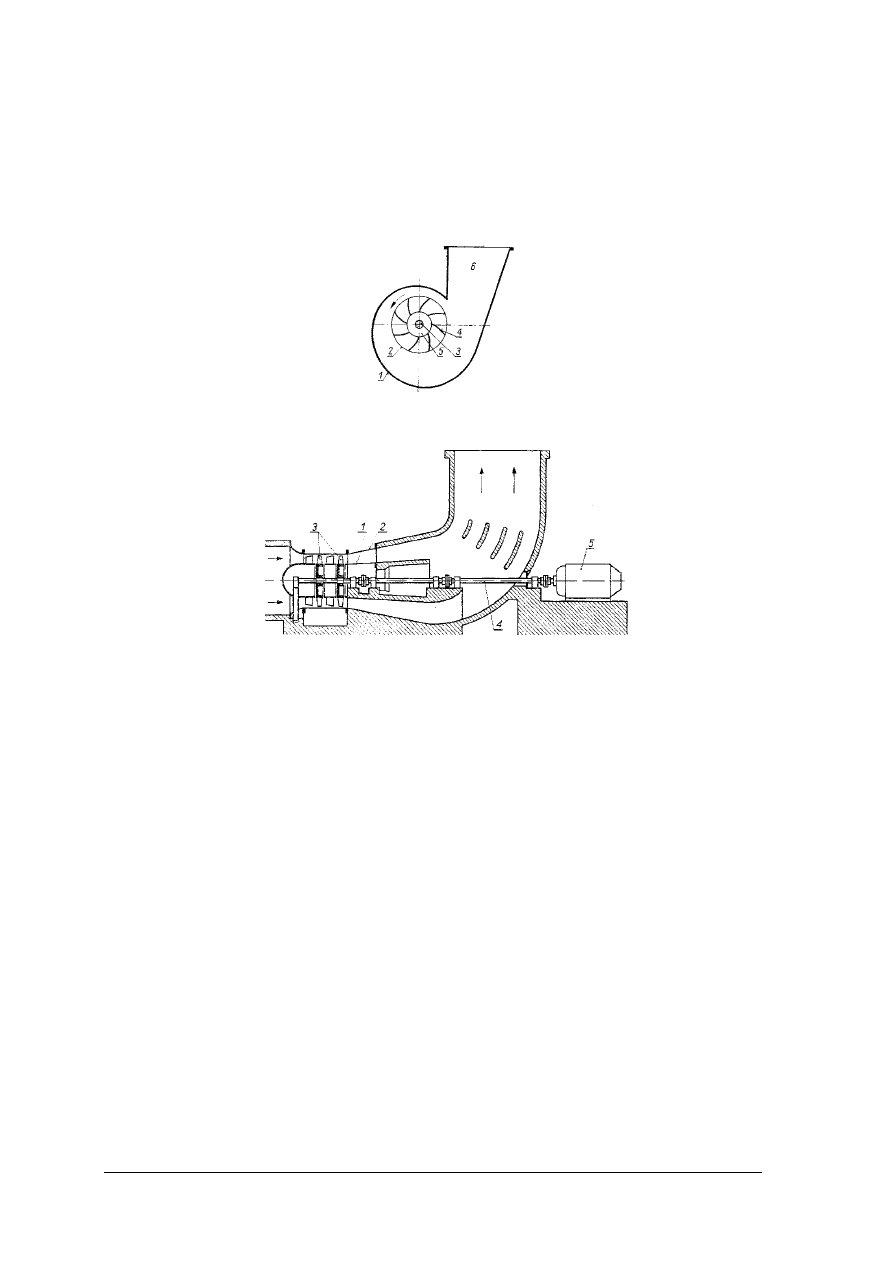
Pompy odśrodkowe (rys. 6), w których ciecz dopływa do wirnika osiowo, a wypływa
promieniowo,
−
Pompy helikoidalne (nazywane również śrubowymi), w których ciecz dopływa do
wirnika osiowo, a wypływa ukośnie,
−
Pompy diagonalne (półosiowe) o ukośnoosiowym przepływie cieczy przez wirnik
zamknięty lub otwarty,
−
Pompy śmigłowe o osiowym przepływie cieczy przez wirnik otwarty, zaopatrzony
w kilka łopatek w kształcie śruby okrętowej lub śmigła lotniczego. Za wirnikiem,
umieszczona jest kierownica łopatkowa.
W zależności od liczby wirników pompy wirowej (połączonych w sposób szeregowy)
rozróżniamy:
−
pompy jednostopniowe, z jednym wirnikiem,
−
pompy wielostopniowe (rys. 7), z kilkoma wirnikami, ciśnienia wytworzone przez
poszczególne wirniki sumują się w wyniku przepływu cieczy kolejno przez każdy z nich.
Zalety i wady pomp wirowych.
Zalety pomp wirowych :
−
małe ich rozmiary,
−
niewielka masa,
−
możność bezpośredniego sprzęgania z szybkobieżnymi,
−
brak zaworów i powietrzników,
−
prostota konstrukcji, niezawodność działania,
−
łatwość regulacji,
−
możność pompowania cieczy gęstych i zanieczyszczonych.
Do wad pomp wirowych należą:
−
brak zdolności samozasysania,
−
mała sprawność przy dużej wysokości podnoszenia.
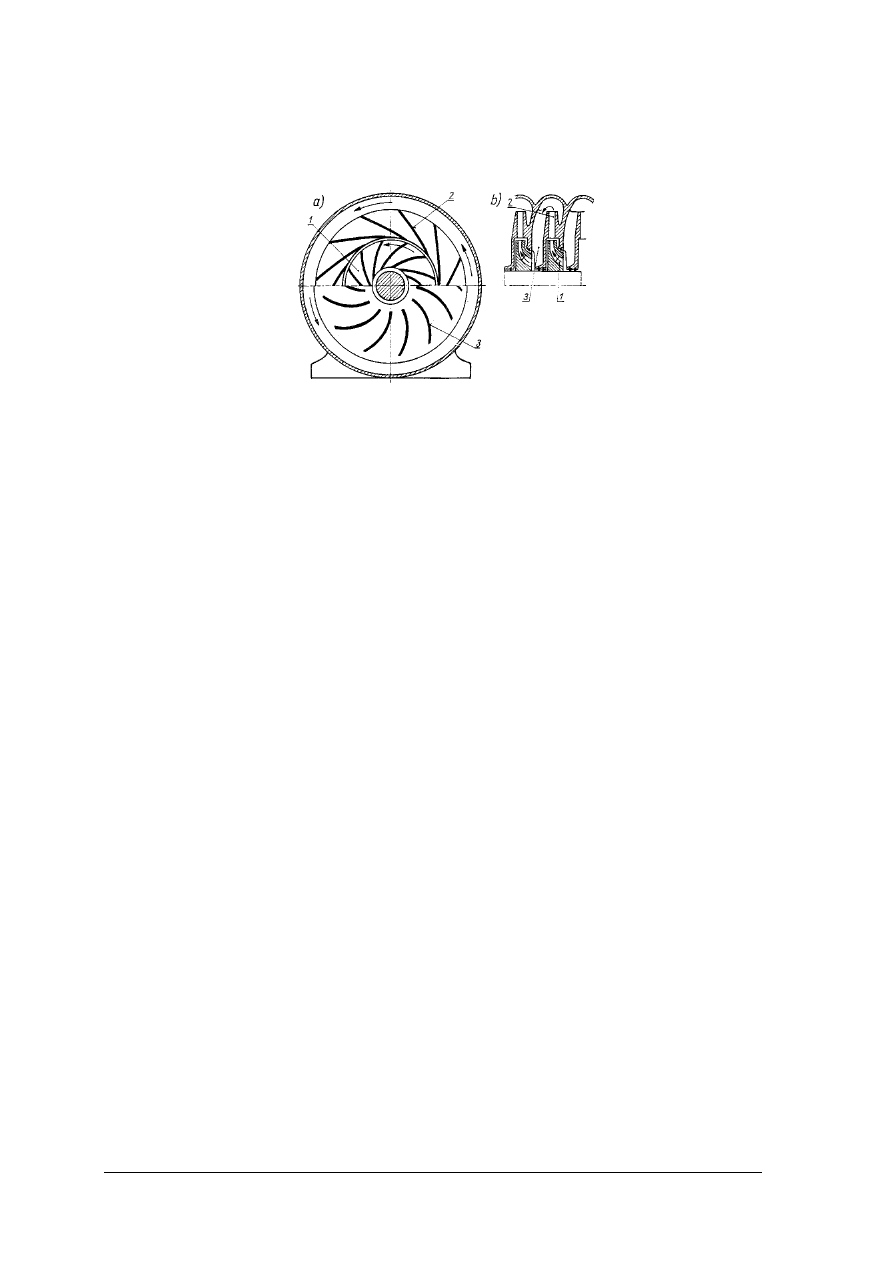
Zasada działania pomp odśrodkowych. Najbardziej rozpowszechnionym rodzajem pomp
wirowych jest pompa o d ś r o d k owa (rys. 6). Główne elementy pompy: wirnik 1, osadzony
na wale napędzanym przez silnik i zaopatrzony na obwodzie w łopatki; kadłub 2, który
stanowi osłonę wirnika; rura ssawna 3,doprowadzająca wodę do wirnika i zaopatrzona
w smok 5; rura tłoczna 4 przy wypływie pompy, zaopatrzona w zawór 7 do regulacji
wydajności pompy; dławnica 8, która zapewnia szczelność między wałem a pokrywą kadłuba.
Jeżeli rura ssawna i kadłub pompy są wypełnione wodą, a wirnik obraca się z określoną
prędkością, to łopatki wirnika pociągają za sobą wodę znajdującą się w kanałach między
łopatkowymi. W wodzie wprawionej w ruch obrotowy powstaje siła odśrodkowa, która
odrzuca wodę od środka wirnika, co wywołuje wzrost ciśnienia przy obwodzie wirnika
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
(tłoczenie na wylocie), i jednoczesny spadek ciśnienia w części środkowej wirnika (ssanie na
dolocie). Przy przepływie przez wirnik pompy następuje przyspieszenie strugi pompowanej
cieczy (wzrost energii kinetycznej strugi), która częściowo przekształca się w energię
ciśnienia na łopatkach wirnika i w spiralnej osłonie pompy.
Rys. 6. Schemat pompy odśrodkowej 1 – wirnik, 2 – kadłub, 3 – rura ssawna, 4 – rura tłoczna, 5 – smok,
6 – zawór stopowy, 7 – zawór regulacyjny, 8 – dławnica [4, s. 99 ]
Rys. 7. Czterostopniowa pompa odśrodkowa l – króciec dolotowy, 2 – wirnik,
3 – odśrodkowa kierownica łopatkowa, 4 – króciec wylotowy, 5 – tarcza odciążająca, 6 – dławnica,
7 – przewal, 8 – odśrodkowa kierownica łopatkowa [4, s.100]
Wydajność pomp wirowych. Objętościowe straty pomp wirowych są wywołane
nieszczelnościami między obracającymi się i nieruchomymi elementami pompy. Sprawność
objętościowa nowych pomp wirowych jest
η
v
= 0,88–0,98 zależnie od wielkości, rodzaju
pompy i jakości jej wykonania. Wydajność pomp odśrodkowych nie przekracza 3 m
3
/s, jednak
budowane są również na specjalne potrzeby pompy o wydajności powyżej 100 m
3
/s.
Wydajność pomp śmigłowych sięga 50 m
3
/s.
Moc
silników największych pomp dochodzi do
100 MW.
Najbardziej ekonomiczną regulację wydajności pomp wirowych uzyskujemy
przez zmianę prędkości
obrotowej wirnika, co najłatwiej wykonać przy napędzie pompy
przez silnik elektryczny z układem sterowania i regulacji. Do ciągłej regulacji wydajności
pompy wirowej napędzanej silnikiem elektrycznym o stałej prędkości obrotowej stosuje się
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
sprzęgło hydrauliczne. Umożliwia ono regulację w zakresie 98% do 20% znamionowej
prędkości obrotowej silnika napędzającego. W górnictwie stosowane są przede wszystkim
pompy wirowe wielostopniowe do odwadniania głównego, pompy tłokowe ze względu małą
wydajność nie są stosowane w głównym odwodnieniu. Odwadniania oddziałów realizowane
jest przez mniejsze pompy wirowe z napędem elektrycznym lub pneumatycznym. Pompy
strumieniowe oraz samozasysające stanowią pomocnicze wyposażenie pompowni.
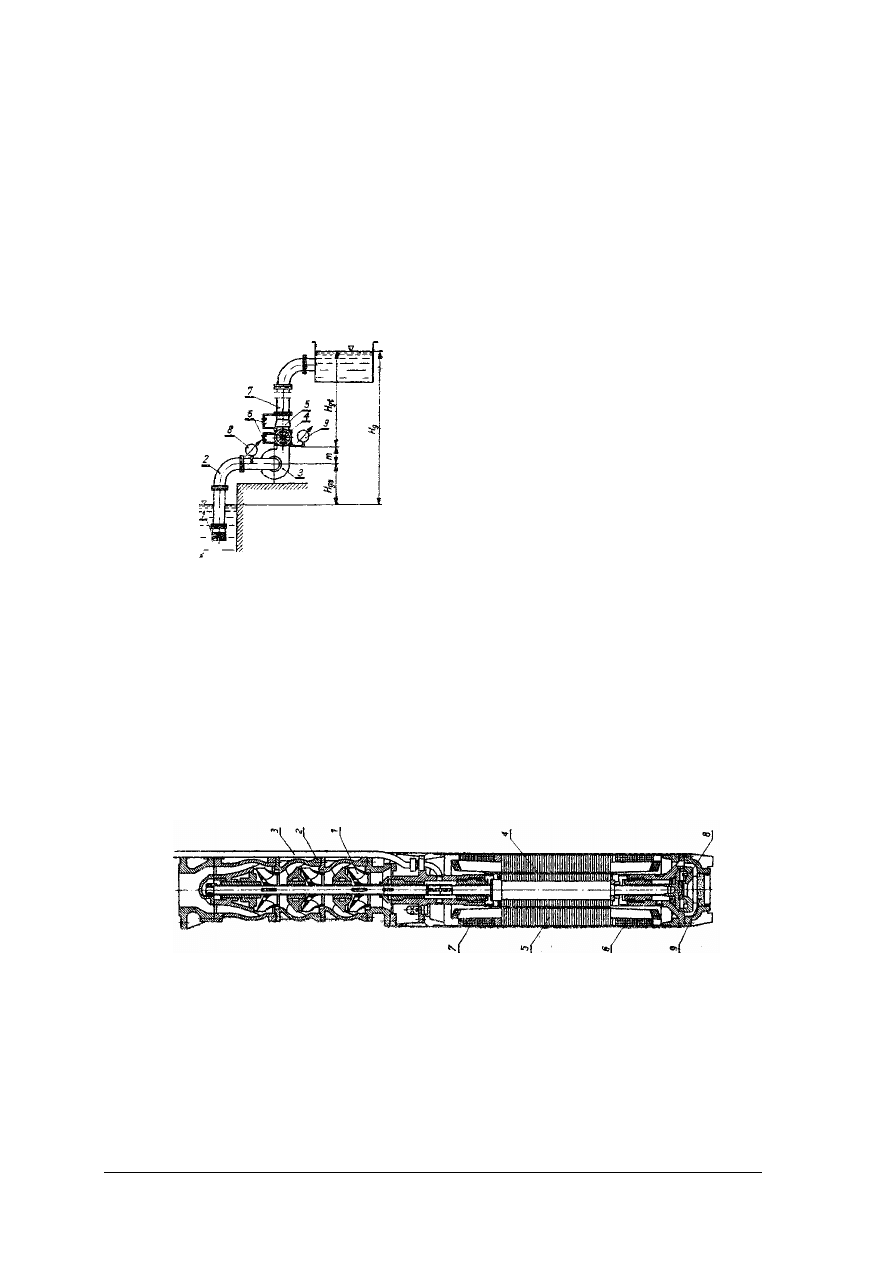
Podstawowe elementy, takie jak przewód ssawny, pompa, armatura i przewód tłoczny,
stanowią instalację pompową (układ pompowy). Schemat układu pompowego z pompą
wirową pokazany jest na rys.8. W schemacie tym pompa wirowa może być zastąpiona innym
typem pompy.
Rys. 8. Schemat układa pompowego z pompą wirową [5, s. 1432]
Pompy specjalne. Pompami specjalnymi są pompy stosowane do odwadniania wyrobisk,
przy głębieniu szybów, otworów wiertniczych, przerzutu wody w kopalni, czyszczeniu rząpi
oraz pompy stanowiące wyposażenie większych pompowni.
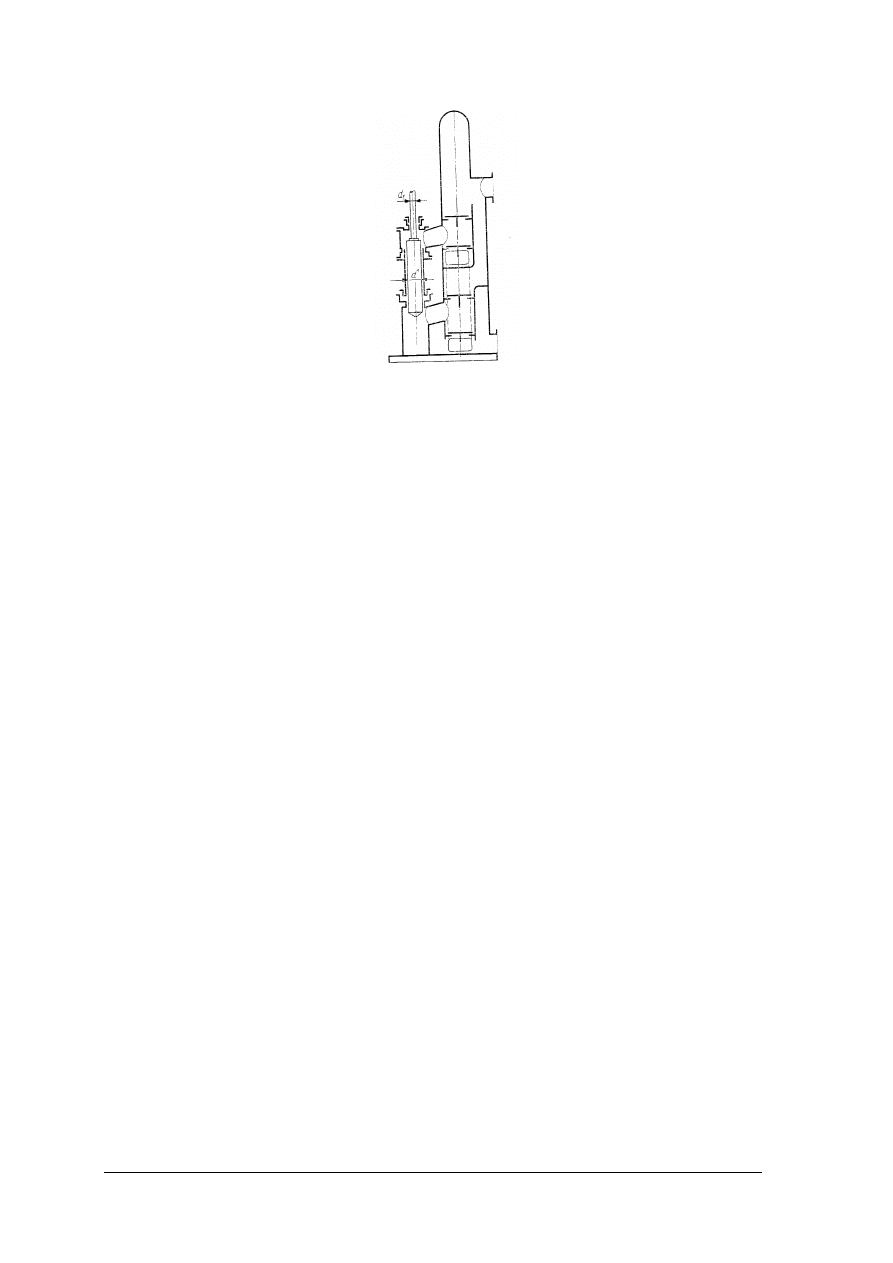
Pompy głębinowe. Zadaniem pomp głębinowych jest podnoszenia cieczy z otworów
wiertniczych. Najczęściej są to pompy odśrodkowe lub diagonalne o wale pionowym
sprzęgniętym z silnikiem elektrycznym zatopionym w wodzie (rys.9). Zewnętrzna średnica
pomp nie przekracza zwykle 250 mm.
Rys. 9. Pompa głębinowa diagonalna wielostopniowa z zatopionym silnikiem elektrycznym:
1 – wirnik pompy, 2 – kierownica, 3 – kabel, 4 – wirnik silnika, 5 – stojan, 6 – uzwojenie,
7 – płaszcz, 8 – łożysko oporowe, 9 – osłona łożyska [5, s. 1440]
Wydajność pomp dochodzi do 6 m
3
/min. Wysokość podnoszenia pomp z silnikami
elektrycznymi zatopionymi przekracza 200 m (wykonaniu specjalnym do 2000 m).
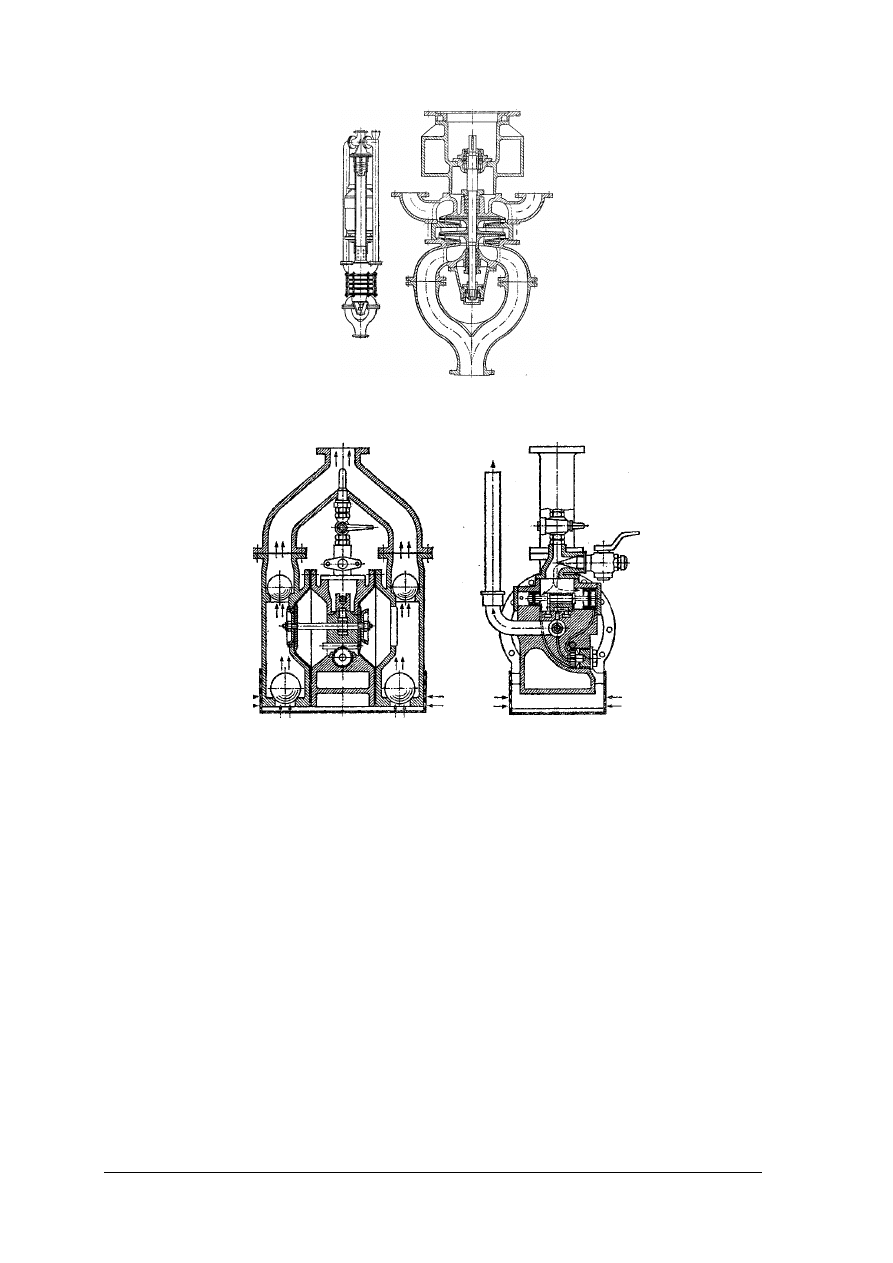
Pompy szybowe. Silnik z pompą o wale pionowym umieszczony jest na wspólnej ramie
zawieszonej na linie opuszczanej w miarę głębienia szybów. Na rys.10 pokazana jest pompa
typu OSS.
1.
zawór stopowy (kosz ssawny),
2.
rura ssawna,
3.
kadłub pompy,
4.
zawór regulacyjny tłoczny,
5.
zawór zwrotny na tłoczeniu,
6.
obejście z zaworami dla zalania pompy,
7.
rurociąg tłoczny,
8.
wakuometr,
9.
manometr
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Rys. 10. Pompa szybowa typu OSS 80-100R [5, s. 1441]
Rys. 11. Pompa Pleigera [5, s. 1444]
W przypadku konieczności pompowania wody silnie zanieczyszczonej piaskiem lub mułem,
wykorzystuje się pompy przeponowe. Przykładem takiej pompy jest przedstawiona na rys. 11
pompa o wydajności do 0,4 m
3
i wysokości tłoczenia do 150 m. Pompa jest napędzana
silnikiem powietrznym którego zużycie wynosi do 8m
3
/min.
Dopływ wody w polskich
kopalniach waha się w granicach od 0,2 do 25 m
3
/min. Odwadnianie może być:
−
przodkowe, gdy pompa odprowadza wodę zbierającą się w jednym wyrobisku,
−
oddziałowe, gdy zespół pomp stanowiący tzw. pompownię oddziałową odprowadza
wodę, która z całego oddziału spływa do zbiorników oddziałowych,
−
główne, gdy zespół pomp odprowadza wodę, która spływa ściekami i chodnikami
wodnymi do zbiorników zlokalizowanych przy komorze pomp w pobliżu podszybia.
Instalowanie i obsługa pomp. Dokładna znajomość obsługi pomp i urządzeń pomocniczych
jest ważna ze względu na bezpieczeństwo pracy w kopalni. Wszystkie czynności związane
z uruchomieniem, eksploatacją i zatrzymywaniem pomp muszą być realizowane zgodnie
z podanymi czynnościami oraz poznanie przyczyn i skutków nieprawidłowego postępowania
przy instalowaniu, uruchamianiu, prowadzeniu i zatrzymywaniu zespołów pompowych.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Instalowanie. Wysokość ssania pompy powinna być jak najmniejsza. Pompy, które pompują
mieszaninę wody i ciał stałych i nie mają zaworów stopowych, powinny być samozalewne,
czyli pracować z napływem. Przy określeniu maksymalnej wysokości ssania należy
uwzględnić obliczenia projektowe.
4.1.2.
Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jakie są zalety i wady stosowania pomp wirowych?
2.
Jakie podstawowe elementy wchodzą w skład instalacji pompowej?
3.
Co to jest wydajność teoretyczna?
4.
Co to jest wydajność rzeczywista?
5.
Co to jest sprawność wydajnościowa pompy?
6.
Jaka jest graniczna wydajność standardowych pomp odśrodkowych?
7.
Jaką rolę pełni nurnik w pompach nurnikowych?
4.1.3.
Ćwiczenia
Ćwiczenie 1
Oblicz wydajność rzeczywistą jednocylindrowej pompy obustronnego działania, jeżeli:
−
ś
rednica tłoka D = 200 mm,
−
skok tłoka S = 250 mm
−
prędkość obrotowa n = 50 obr/min,
−
sprawność
η
v
= 0,9,
−
ρ
c
=1000 kg/m
3
(woda).
Na podstawie obliczonej wydajności rzeczywistej dobierz moc silnika elektrycznego
napędzającego pompę, jeżeli użyteczna wysokość podnoszenia H
u
= 50 m, a sprawność
ogólna pompy
η
o
= 0,65.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeliczyć potrzebne wielkości na jednostki stosowane w zależnościach,
2)
obliczyć wydajność pompy na podstawie zależności,
th
v
r
Q
Q
η
=
3
/
60
r
v
n
Q
i A S
m
s
η
= ⋅ ⋅ ⋅
⋅
i = liczba czynnych stron w tłoku i=1 w pompie jednostronnego działania, i = 2 w pompie
dwustronnego działania;
S – skok tłoka w [m];
n – prędkość obrotowa wału korbowego [obr/min] n = 30 – 300 obr/min;
4
D
A
2
⋅
=
π
pole przekroju tłoka [m
2
], D = średnica tłoka w [m];
3)
korzystając z podanych danych i danych otrzymanych z obliczeń określić moc silnika
napędzającego pompę, na podstawie zależności:
c
r
u
w
o
Q H
g
P
ρ
η
⋅ ⋅
⋅
=
[W] moc pobrana przez pompę (moc na wale pompy)
c
r
u
u
Q H
g
P
ρ
=
⋅ ⋅
⋅
[W] moc użyteczna (moc przekazywana pompowanej cieczy)

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
u
o
w
P
P
η
=
sprawność ogólna
g = 9,81 m/s
2,
ρ
c
– gęstość pompowanej cieczy kg/m
3
4)
w celu zagwarantowania odpowiedniego zapasu mocy, powiększyć obliczoną moc silnika
o 20%,
Wyposażenie stanowiska pracy:
−
kalkulator, tablice matematyczno fizyczne,
−
materiały do pisania.
Ćwiczenie 2
Dla danych z ćwiczenia pierwszego, korzystając z arkusza kalkulacyjnego lub innego
programu do obliczeń wykonaj charakterystykę P
w
= f(H
u
) H
u
= 10–100 m z krokiem 5 m oraz
Q
r
= f(n) n = 10–50 obr/min z krokiem 2 obr/min pozostałe dane przyjmij jako stałe.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
w arkuszu kalkulacyjnym lub innym programie obliczyć wyniki z podanym krokiem,
2)
wykreślić charakterystyki,
3)
przedstawić wnioski.
Wyposażenie stanowiska pracy:
−
komputer z zainstalowanym programem,
−
drukarka.
4.1.4.
Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
przedstawić podział pomp ze względu na zasadę działania?
2)
przedstawić
przeznaczenie
pomp
zębatych,
łopatkowych
i śrubowych?
3)
określić w jaki sposób łopatki pompy łopatkowej dociskane są do
ś
cianek gładzi kadłuba pompy ?
4)
przedstawić ogólne zalecenia dotyczące instalowania i obsługi pomp?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
4.2.
Maszyny powietrzne
4.2.1.
Materiał nauczania
Do maszyn powietrznych zalicza się silniki pneumatyczne, transformujące energię
ciśnienia sprężonego powietrza na pracę mechaniczną oraz wentylatory i dmuchawy czyli
maszyny wytwarzające pewną różnicę ciśnienia powietrza jak również sprężarki sprężające
powietrze do odpowiednio dużego ciśnienia, zasilające silniki pneumatyczne.
W górnictwie znalazły powszechne zastosowaniowe sprężarki, silniki pneumatyczne,
a zwłaszcza wentylatory.
Sprężarki. Sprężarki stosowane w górnictwie zasilają powietrzem sprężonym maszyny
górnicze, z silnikami pneumatycznymi pracującymi przy ciśnieniu do ok. 0,6 MPa. Sprężarki
dzieli się na:
−
wyporowe,
−
wirowe (odśrodkowe).
Sprężarki wyporowe mogą być tłokowe lub rotacyjne. W górnictwie stosuje się sprężarki
tłokowe niskoprężne wydajności do 6000 m
3
/h powietrza zassanego, wysokoprężne do
18 000 m
3
/h, sprężarki rotacyjne o wydajności do 6000 m
3
/h oraz odśrodkowe wydajności do
30 000 m
3
/h.
Sprężarki tłokowe. Sprężarki tłokowe budowane są jako jedno lub wielostopniowe. Sprę-
ż
arki jednostopniowe stosuje się do ciśnień nie przekraczających 0,6MPa. Zasada działania
sprężarki tłokowej jest odwróceniem zasady działania silnika parowego tłokowego różnica
wynika ze sposobu konstrukcji rozrządu. W czasie sprężania powietrze nagrzewa się. Do jego
chłodzenia stosuje się chłodnice wodne. Tłok poruszany przez silnik napędowy za pomocą
mechanizmu korbowego wykonuje w cylindrze ruchy postępowo–zwrotne. Głowica cylindra
posiada dwa zawory, które otwierają się samoczynnie pod wpływem różnicy ciśnień z obu
stron zaworu, a zamykają się wskutek działania sprężyny. Uzyskanie większych ciśnień
powietrza w sprężarkach jednostopniowych ogranicza końcowa temperatura sprężanego
powietrza, która w procesie sprężania wzrasta. Wzrost temperatury sprężanego powietrza
może być przyczyną niebezpiecznego samozapłonu mieszaniny tlenu z powietrza z parami
oleju smarującego gładź cylindra. Ze względów bezpieczeństwa temperatura końcowa
powietrza przy ciągłym ruchu sprężarki nie powinna przekraczać ok. 200°C, z tych powodów
ciśnienie sprężonego powietrza w sprężarkach jednostopniowych, nie może być wyższe niż
0,6–0,8 MPa. W przypadkach kiedy potrzebne jest powietrze o ciśnieniu większym, stosuje
się sprężarki wielostopniowe. Sprężarki wielostopniowe, złożone z kilku sprężarek
jednostopniowych, kolejno sprężają gaz. Uzyskując coraz wyższe ciśnienia. W sprężarce
wielostopniowej stosuje się chłodzenie między stopniowe, polegające na tym, że sprężony,
gorący gaz w pierwszym niskoprężnym cylindrze przechodzi do chłodnicy, gdzie jest
chłodzony za pomocą zimnej wody, do początkowej temperatury i następnie zostaje silniej
sprężony w następnym, (średnioprężnym) cylindrze. Powietrze z cylindra średnioprężnego
znów jest chłodzone w drugiej chłodnicy międzystopniowej, a następnie jeszcze silniej
sprężony w cylindrze wysokoprężnym. Kolejne cylindry sprężarki wielostopniowej mają
coraz mniejszą pojemność, gdyż w miarę jak ciśnienie gazu wzrasta, jego objętość maleje.
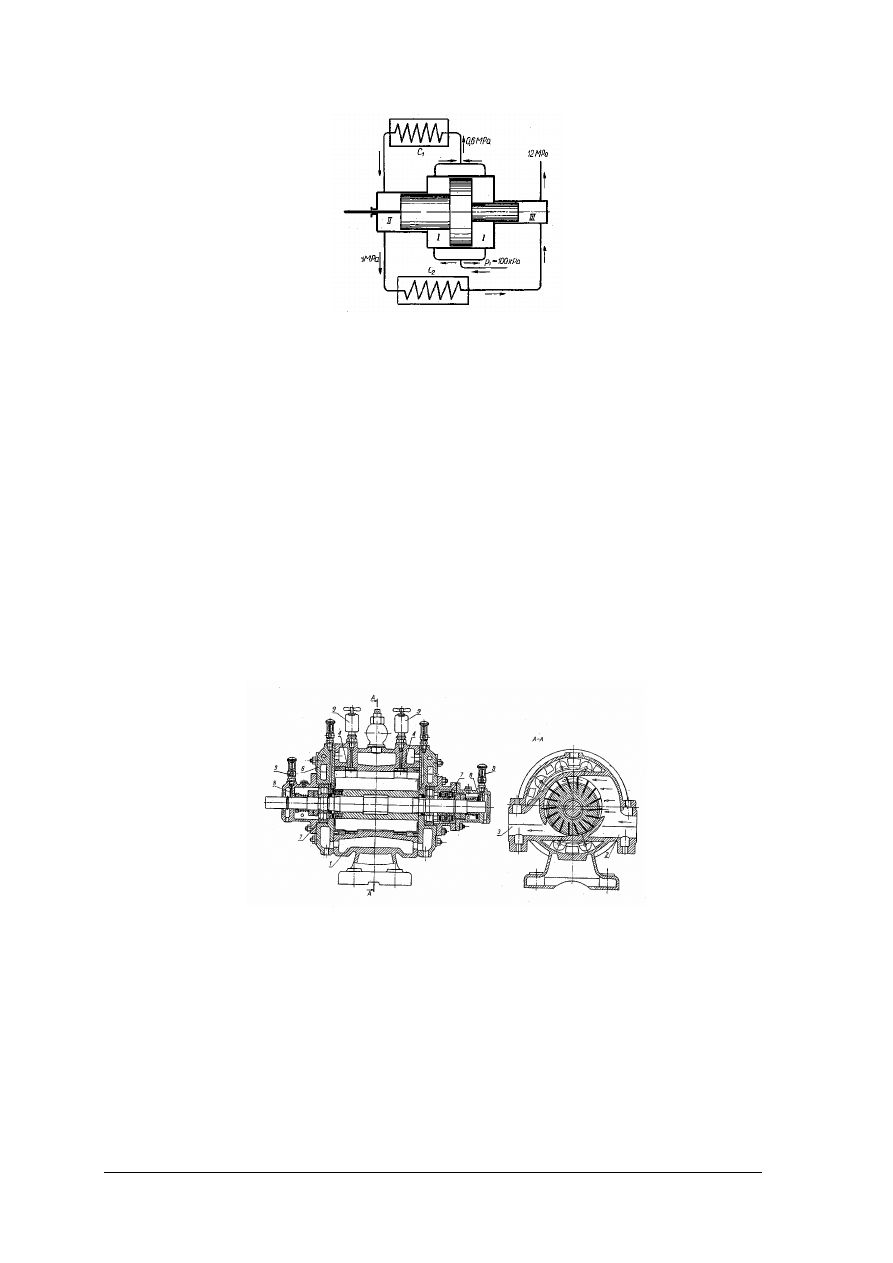
Rys. 12. przedstawia schemat sprężarki trzystopniowej, która ma jeden wspólny tłok
różnicowy o trzech różnych średnicach.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Rys. 12. Schemat sprężarki 3-stopniowej z tłokiem różnicowym:
I – część niskoprężna obustronnego działania, II – część średnioprężna jednostronnego działania,
III – część wysokoprężna Jednostronnego działania,
C
1
, C
2
– chłodnice międzystopniowe [4, s. 366 ]
Sprężarki rotacyjne są stosowane w przypadku konieczności uzyskania dużej
wydajności przy ciśnieniu do ~1,6 MPa. Zaletą sprężarek rotacyjnych jest szybkobieżność,
małe wymiary, równomierna praca i nieskomplikowana konstrukcja, natomiast wadą
ograniczone wartości ciśnienie tłoczenia, mała sprawność mechaniczna i wymagania dużej
dokładności wykonania. Najczęściej wykorzystywane są sprężarki łopatkowe (rys. 13).
W cylindrycznym kadłubie, mimośrodowo osadzony został wirnik ze szczelinami, w których
znajdują się cienkie, prostokątne łopatki metalowe lub z tworzywa sztucznego. W czasie
ruchu wirnika łopatki wysuwają się pod działaniem siły odśrodkowej i ślizgają po gładzi
kadłuba. W celu ograniczenia zużycia gładzi kadłuba sprężarki, zmniejsza się nacisk łopatek
poprzez zastosowanie pierścieni ślizgowych, umieszczonych w rowkach kadłuba i wirujących
razem z wirnikiem.
Rys. 13. Przykład konstrukcji sprężarki łopatkowej [2, s. 133]
Komora sprężania ma kształt sierpowy, a łopatki tworzą zamknięte przestrzenie
międzyłopatkowe o zmiennej objętości, początkowo wzrastające, co powoduje zassanie gazu,
a następnie malejące, czego efektem jest sprężanie i wytłaczanie gazu. Sprężarka łopatkowa
jest najczęściej chłodzona wodą. Konieczne jest smarowanie łożysk, pierścieni i innych
powierzchni ślizgowych w celu zmniejszenia tarcia między wirnikiem, łopatkami i kadłubem
oraz dla utrzymania szczelności. Wydajność sprężarek łopatkowych dochodzi do 70,00 m
3
/h,
ciśnienie tłoczenia do 0,5 MPa w sprężarce jednostopniowej, aż do 1,6 MPa
w dwustopniowych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Sprężarki wirowe. Budowa sprężarek wirowych jest analogiczna do budowy pomp
wirowych. Oba te rodzaje maszyn mają wirnik osadzony na wale napędzanym przez silnik
i zaopatrzony na obwodzie w łopatki oraz kadłub, który stanowi osłonę wirnika.
Rys. 14. Schemat budowy sprężarki odśrodkowej
a) przekrój prostopadły do osi wału, b) przekrój równoległy do osi wału [2, s. 116]
Sprężarki wirowe są stosowane w wielu dziedzinach techniki do sprężania dużych
i bardzo dużych objętości powietrza i innych gazów. Wyróżniamy wirowe sprężarki
odśrodkowe (promieniowe) i osiowe (śmigłowe). Odśrodkowe sprężarki jednostopniowe nie
są chłodzone wodą (końcowa temperatura sprężonego gazu nie jest wysoka) i buduje się je
jako dmuchawy. Odśrodkowe sprężarki wielostopniowe sprężają gaz do wyższego ciśnienia
i są chłodzone wodą. Powietrze doprowadza się do środka koła wirnikowego. Wskutek dużej
prędkości obrotowej koła wirnikowego powietrze przepływające między jego łopatkami
zwiększa swoją prędkość przy nieznacznym wzroście ciśnienia, a następnie dostaje się do
dyfuzora. Tam traci prędkość, a jego energia kinetyczna przemienia się w energię ciśnienia.
Taki sposób pracy nie pozwala na uzyskanie dużych przyrostów ciśnienia powietrza na
jednym stopniu sprężania. Sprężarki odśrodkowe wielostopniowe mają koła wirnikowe
poszczególnych stopni osadzone są na jednym wspólnym wale, a powietrze z dyfuzora
niższego stopnia sprężania kierowane jest przez kanał zwrotny do koła wirnikowego
wyższego stopnia sprężania. Koła wirnikowe wykonuje się z jednego bloku przez
wyfrezowanie łopatek, średnice kół wirnikowych poszczególnych stopni zmniejszają się
w miarę stopniowego sprężania powietrza. Stosowane w sprężarkach współczesnych
chłodnice, umieszczone są na zewnętrz, chłodzą powietrze po każdym lub po kilku stopniach
sprężania. Ponieważ sprężarki odśrodkowe wymagają dużej prędkości obrotowej w związku
z tym napędza się je zwykle silnikami elektrycznymi za pośrednictwem przekładni
podwyższającej prędkość obrotową. Regulację wydajności sprężarki w przypadku napędzania
asynchronicznym silnikiem elektrycznym przeprowadza się za pomocą dławienia powietrza
w rurociągu ssawnym. Sprężarki odśrodkowe równomiernie tłoczą powietrze, obsługa jest
prosta, natomiast wadą ich jest wysoka cena i konieczność starannej konserwacji.
Klasyfikacja napędów pneumatycznych. Pod względem konstrukcyjnym rozróżniamy
następujące rodzaje napędów pneumatycznych:
−
pneumatyczne siłowniki tłokowe (cylindry pneumatyczne, analogiczne do siłowników
hydraulicznych),
−
pneumatyczne siłowniki przeponowe (membranowe),
−
pneumatyczne silniki rotacyjne (łopatkowe, zębate, wielotłoczkowe, analgiczne do
odpowiednich pomp rotacyjnych),
−
pneumatyczne silniki wirowe (akcyjne turbiny pneumatyczne),
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
−
wibratory pneumatyczne (napędy ruchów oscylacyjnych).
Pneumatyczne
siłowniki
tłokowe.
Pneumatyczne
siłowniki
tłokowe
(cylindry
pneumatyczne) są budowane jako cylindry jednostronnego lub dwustronnego działania.
Stosuje się średnice 200–400 mm i skoki 800–2000 mm. W celu uzyskania łagodnego dojścia
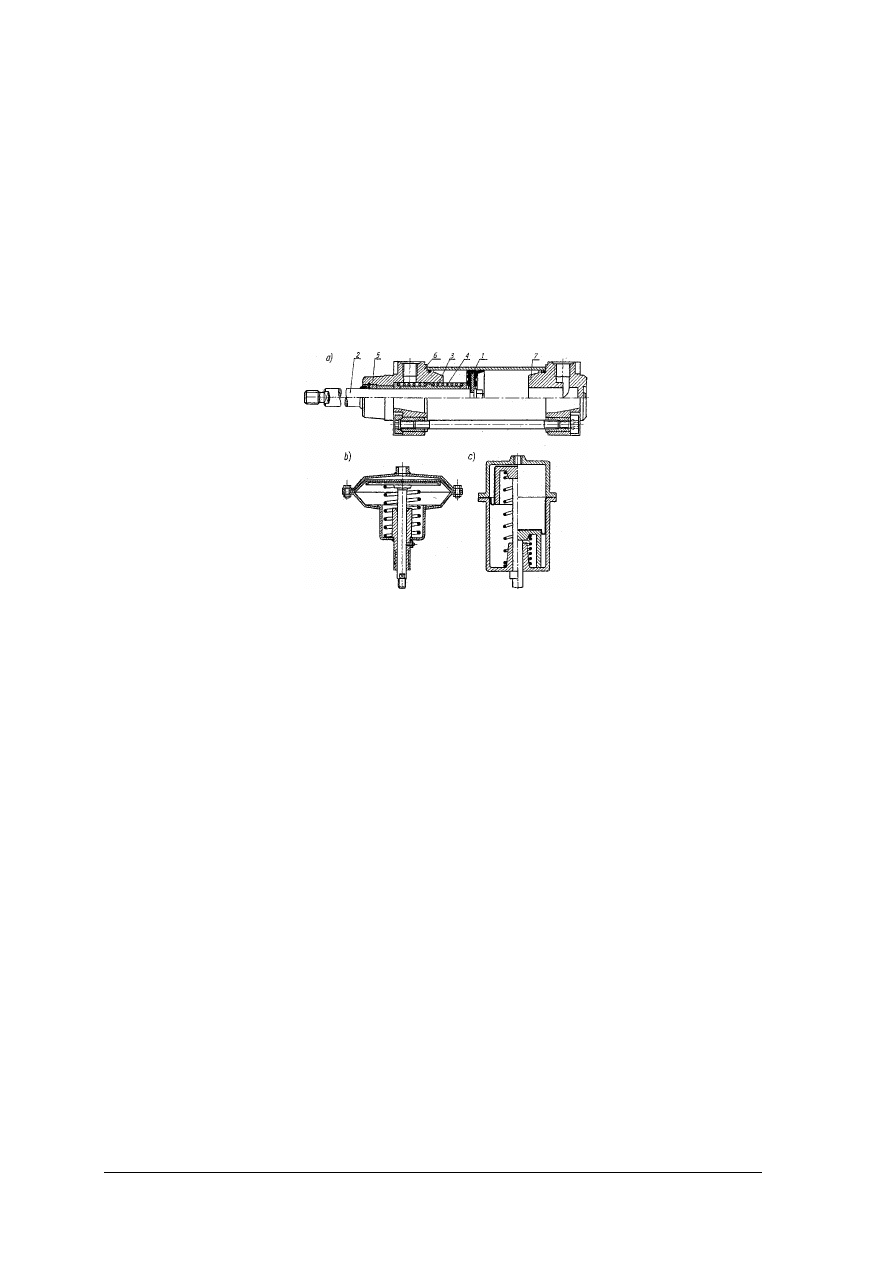
tłoka do położeń skrajnych używa się amortyzatorów powietrznych. Na rys. 15a pokazano
cylinder pneumatyczny jednostronnego działania. Tłok 1 jest wykonany z kołnierzem
uszczelniającym. Na tłoczysku 2 znajduje się tuleja oporowa 3 z dwiema sprężynami 4 do
wycofywania tłoka z tłoczyskiem do położenia początkowego. Część 5 jest pierścieniem
podporowym. Pokrywy 6 i 7 cylindra są mocowane za pomocą śrub dwustronnych.
Rys. 15. Siłowniki pneumatyczne: a) siłownik tłokowy jednostronnego działania,
b) siłownik przeponowy o małym skoku, c) przeponowy o dużym skoku, z przewijaną przeponą [2, s. 203]
Silniki powietrzne. Silniki pneumatyczne dzieli się na :
−
tłokowe,
−
rotacyjne.
Silniki tłokowe mogą być jedno- lub wielocylindrowe, najczęściej silniki
wielocylindrowe buduje się w układzie równoległym cylindrów (silniki dwucylindrowe) lub
w układzie gwiazdowym (pięcio i siedmiocylindrowe).
Silniki rotacyjne buduje się jako łopatkowe lub zębate. Pomimo wysokiego stopnia
elektryfikacji kopalń stosowanie silników pneumatycznych do napędzania maszyn górniczych
jest uzasadnione, zwłaszcza w przodkach o bardzo dużym zagrożeniu metanowym.
Silniki tłokowe. Silnik pneumatyczny tłokowy może być jednostronnego lub dwustronnego
działania. W silniku dwustronnego działania powietrze sprężone doprowadza się na przemian
do jednej lub do drugiej strony cylindra, w wyniku tego ruch tłoka wymuszony jest ciśnieniem
powietrza w obie strony. W silniku jednostronnego działania powietrze sprężone doprowadza
się tylko do jednej strony cylindra efektem tego jest ruch tłoka wymuszony ciśnieniem
powietrza w jedną stronę, natomiast ruch powrotny tłoka uzyskuje się w sposób mechaniczny.
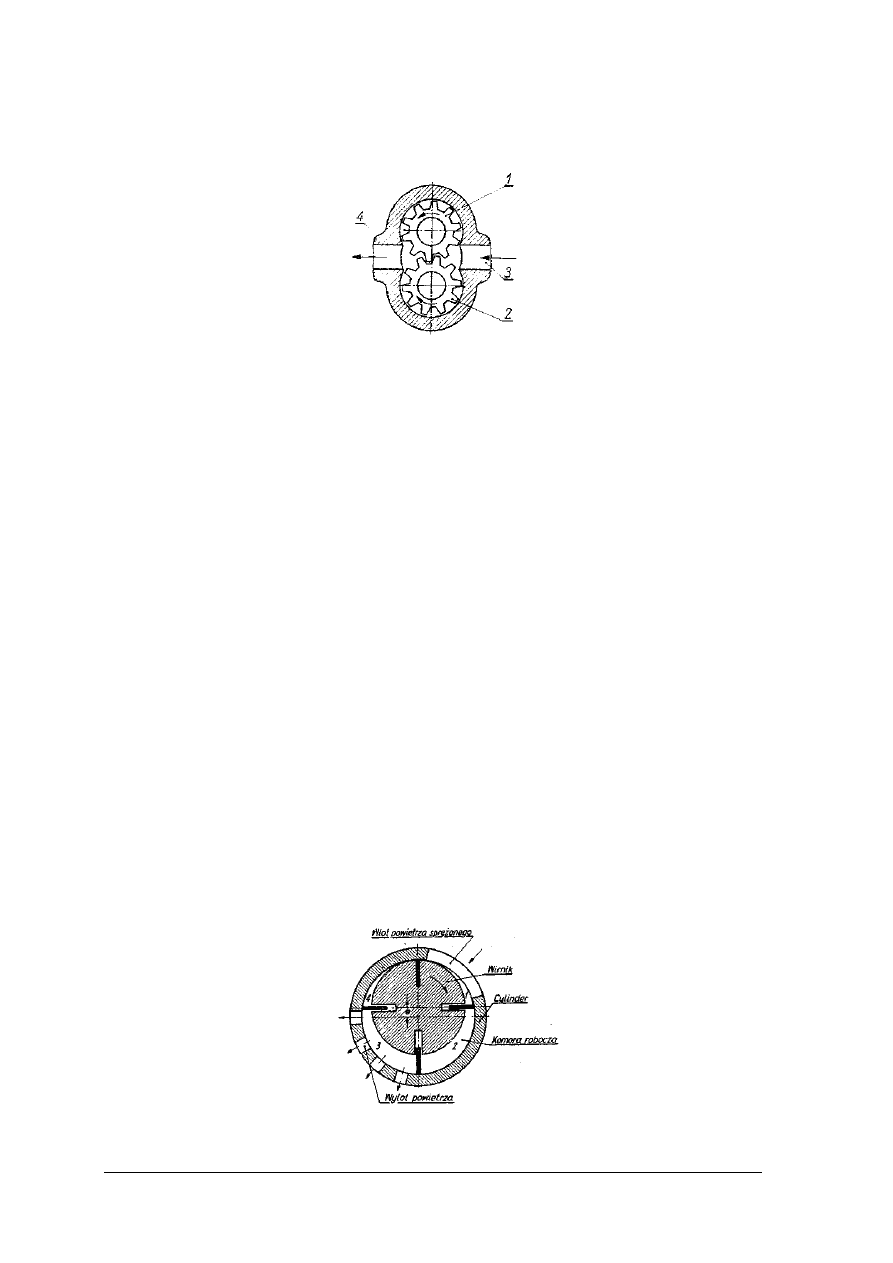
Silnik pneumatyczny zębaty (rys. 16) składa się z dwóch jednakowych kół zębatych 1 i 2,
zazębiających się i umieszczonych w kadłubie w którym wykonano kanały, wlotowy 3
i wylotowy 4. Powietrze sprężone dostaje się przez kanał wlotowy 3, i naciskając na zęby
obraca koło zębate w kierunku pokazanym przez strzałki a następnie wychodzi na zewnątrz
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
kanałem wylotowym. Koła zębate mają znacznie większą szerokość niż koła normalnej
przekładni zębatej.
Rys. 16. Schemat działania silnika pneumatycznego zębatego [2, s. 146]
Zęby są wykonywane jako skośne lub daszkowe. Silnik może napędzać maszynę roboczą
w jednym lub w obu kierunkach obrotów. Zmianę kierunku obrotów można uzyskać przez
zmianę kierunku przepływu powietrza sprężonego przez silnik, doprowadzając go kanałem 4,
a odprowadzając kanałem 3 lub też przez odbieranie mocy silnika z jednego lub drugiego koła
zębatego, które obracają się w kierunkach przeciwnych. W tym drugim przypadku wały obu
kół zębatych muszą być wyprowadzone przez kadłub silnika co komplikuje jego konstrukcję.
Przeciętna prędkość obwodowa kół wirnikowych wynosi V = 10 m/s. Zastosowanie silników
z uzębieniem prostym ogranicza się do maszyn o mocy 20 KM jest to efektem ich dużej
hałaśliwości pracy. Dla maszyn o większej mocy wykorzystuje się silniki o zazębieniu
ś
rubowym lub daszkowym stosowane do silników mocy rzędu 50 KM i więcej. Jednostkowe
zużycie powietrza jest zbliżone do silników prosto uzębionych.
Silnik łopatkowy działa odwrotnie niż sprężarka łopatkowa, do której ma podobną
konstrukcję. Na rys. 17 przedstawiono schematycznie silnik czterołopatkowy. Łopatki
wysunięte podczas obrotu wirnika dociskają pod wpływem siły odśrodkowej do wewnętrznej
ś
ciany cylindra. Między cylindrem i umieszczonym w nim mimośrodowo wirnikiem
istnieją 4 komory o zmieniającej się stale podczas obrotu pojemności. Powietrze sprężone
dopływa do komory 1 otworem wlotowym, wychodzi do otoczenia otworami wylotowymi
z komory 3. W komorze 2 gaz się rozpręża, a w komorze 4 spręża. Sprężanie powinno być
możliwie jak najmniejsze. Podczas obrotów wirnika odbywa się periodycznie napełnianie
każdej komory gazem, a następnie jego rozprężanie. Silniki łopatkowe buduje się przede
wszystkim o małych mocach dla wiertarek obrotowych i pomp przodkowych oraz o mocach
ś
rednich wielkości kilkunastu koni mechanicznych i wykorzystuje najczęściej w maszynach
ręcznych.
Rys. 17. Schemat silnika łopatkowego [2, s. 213]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Rys. 18. Silnik łopatkowy konstrukcji Holmana o mocy 18 KM [6, s. 587]
Wentylatory służą do przemieszczania i sprężania powietrza (lub innego gazu) do ciśnienia
nie przekraczającego 0,1 MPa. W kopalniach podziemnych wentylatory mają znaczenie
podstawowe, zapewniając przewietrzanie kopalń, umożliwiają pracę ludzi pod ziemią.
Przewietrzanie kopalń.
W celu zapewnienia ciągłego przewietrzania kopalnia musi posiadać co najmniej dwa
połączenia z powierzchnią za pomocą szybów: wdechowego, którym powietrze wpływa do
wyrobisk, oraz wydechowego, którym wypływa z podziemi zużyte powietrze. Ilość
dostarczonego powietrza uzależniona jest od liczebności załogi, wielkości wydobycia, stopnia
zagrożenia wybuchem metanu. Powietrze dostarcza się korzystając z wentylatorów głównych,
zbudowanych na powierzchni, które zasysają powietrze zużyte, wytwarzając przez to depresję
(podciśnienie) w podziemiach kopalni. Różnica ciśnienia powoduje zasysanie powietrza
ś
wieżego przez szyb wdechowy. Wentylatory główne ze względu na zasadę działania dzieli
się na:
−
odśrodkowe,
−
osiowe.
Oprócz wentylatorów głównych, stosuje się również w podziemnych wyrobiskach
wentylatory przodkowe (lutniowe), których zadaniem jest dostarczenie powietrza świeżego do
wyrobisk ślepych. Wentylatory główne napędza się silnikami elektrycznymi, wentylatory
lutniowe mogą być napędzane silnikami elektrycznymi lub pneumatycznymi. Schemat
wentylatora głównego odśrodkowego (promieniowego) przedstawia rys. 19. Wewnątrz
osłony 1,wykonanej ze stalowych segmentów,porusza się wirnik 2 umocowany na wale 3.
Wirnik ma łopatki 4, które mogą być promieniowe lub zagięte w kierunku przeciwnym niż
kierunek obrotów, jak to pokazano na rysunku. Powietrze dopływa do wirnika dośrodkowo
przez otwór ssawny 5 i wskutek siły odśrodkowej wytworzonej przez wirnik obracający się
dużą prędkością obrotową jest wypychane na zewnątrz przez dyfuzor 6. Takie działanie
powoduje powstanie różnicy ciśnienia powietrza, która nazywa się depresją wentylatora.
Wentylator odśrodkowy może mieć ssanie jednostronne lub dwustronne. W pierwszym
powietrze dochodzi do wirnika tylko z jednej strony, w drugim –z obu stron, symetrycznie.
Zarówno pierwszy, jak i drugi rodzaj wentylatora ma tylko jeden dyfuzor. Wirnik wentylatora
z dwustronnym zasysaniem (rys. 19) składa się z dwóch tarcz 1 i 2, między którymi znajdują
się łopatki 3. Dobór wentylatora odbywa się w odniesieniu do tzw. otworu równoznacznego
kopalni. Otworem równoznacznym kopalni nazywa się taki otwór w przegrodzie, przez który
przy określonej depresji przepływa taka sama ilość powietrza w minucie jak przez daną
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
kopalnię. W przypadku zmian przewietrzania na dole kopalni, co oznacza zmianę się otworu
równoznacznego, zmienia się również depresję wentylatora a przez to zmienia się ilość
zassanego powietrza. Dopasowywanie wentylatora do różnych warunków przewietrzania
uzyskuje się za pomocą regulowania przekroju kanału ssawnego przymykając lub otwierając
zasuwę, albo za pomocą regulowania prędkości obrotowej wentylatora.
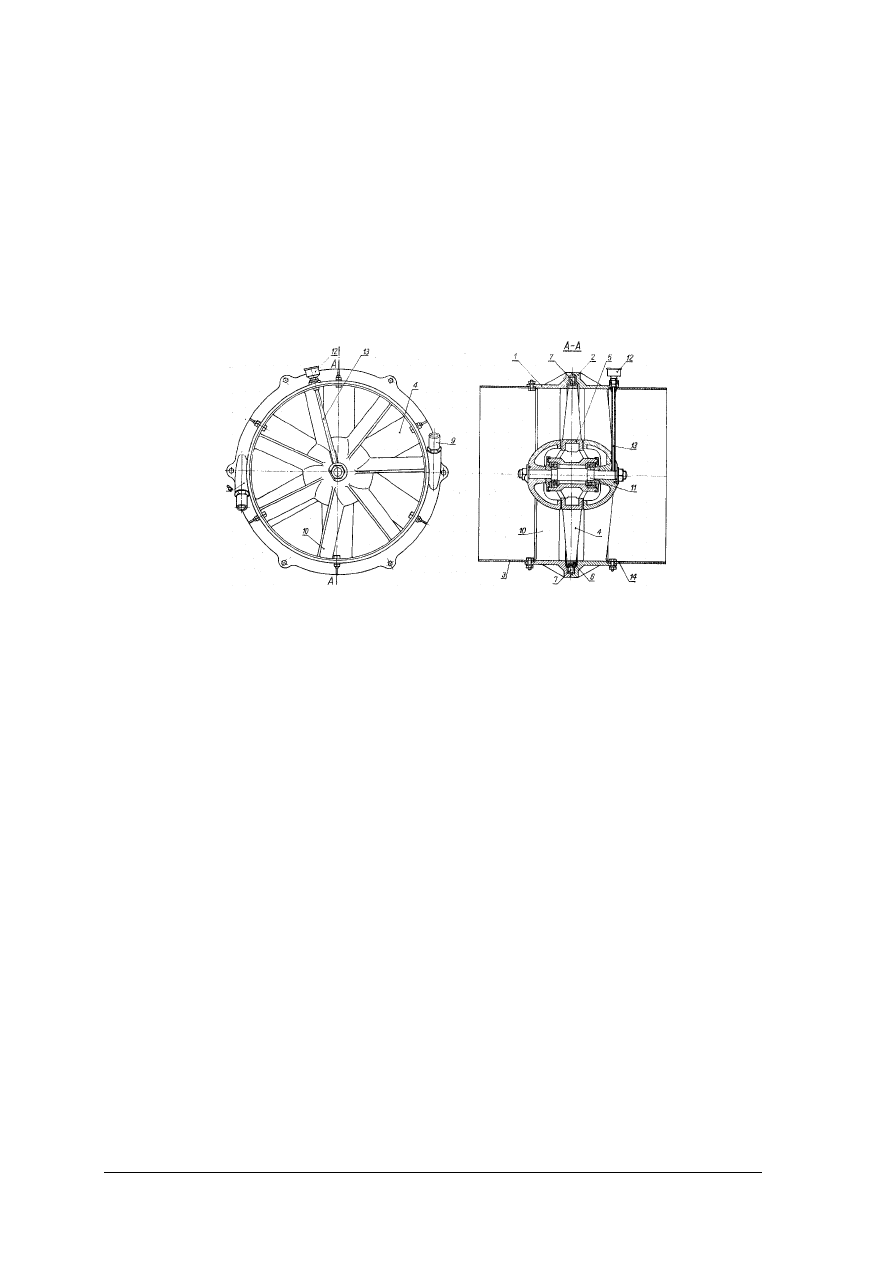
Rys. 19. Schemat wentylatora głównego odśrodkowego [2, s. 120]
Rys. 20. Schemat wentylatora głównego osiowego. [2, s. 121]
Wentylatorami o znacznie lepszych parametrach są wentylatory osiowe (rys. 20). Kanał
w takim wentylatorze ma przekrój pierścieniowy i utworzony jest przez dwa blaszane
segmenty w kształcie walca 1 i 2, umocowane współosiowo. Wirnik 3 osadzony na
wale 4, obracany silnikiem elektrycznym 5, ma dwa rzędy łopatek, tworzące szeregowe
połączenie dwóch wentylatorów. Prędkość obrotowa wirnika wynosi około 1500 obr/min, co
pozwala na bezpośrednie napędzanie za pomocą silnika elektrycznego, bez konieczności
stosowania przekładni zębatej. Zalety wentylatorów osiowych takie jak:
−
duża sprawność,
−
łatwa regulacja,
−
łatwa zmiana kierunku przepływu powietrza (przez zmianę kierunku obrotów silnika),
−
małe wymiary i ciężar,
spowodowały że znalazły one powszechne zastosowanie kopalniach.
Wentylatory lutniowe przeznaczone do przewietrzania ślepych wyrobisk działają w układzie
ssącym lub tłoczącym. Napęd stanowią silniki elektryczne lub pneumatyczne. Wentylatory
lutniowe z napędem elektrycznym w polach metanowych II-IV kategorii zagrożenia
metanowego zabudowuje się w taki sposób, aby silniki wentylatorów znajdowały się na
początku lutniociągu w prądzie powietrza wytworzonym przez wentylator główny. Budowę
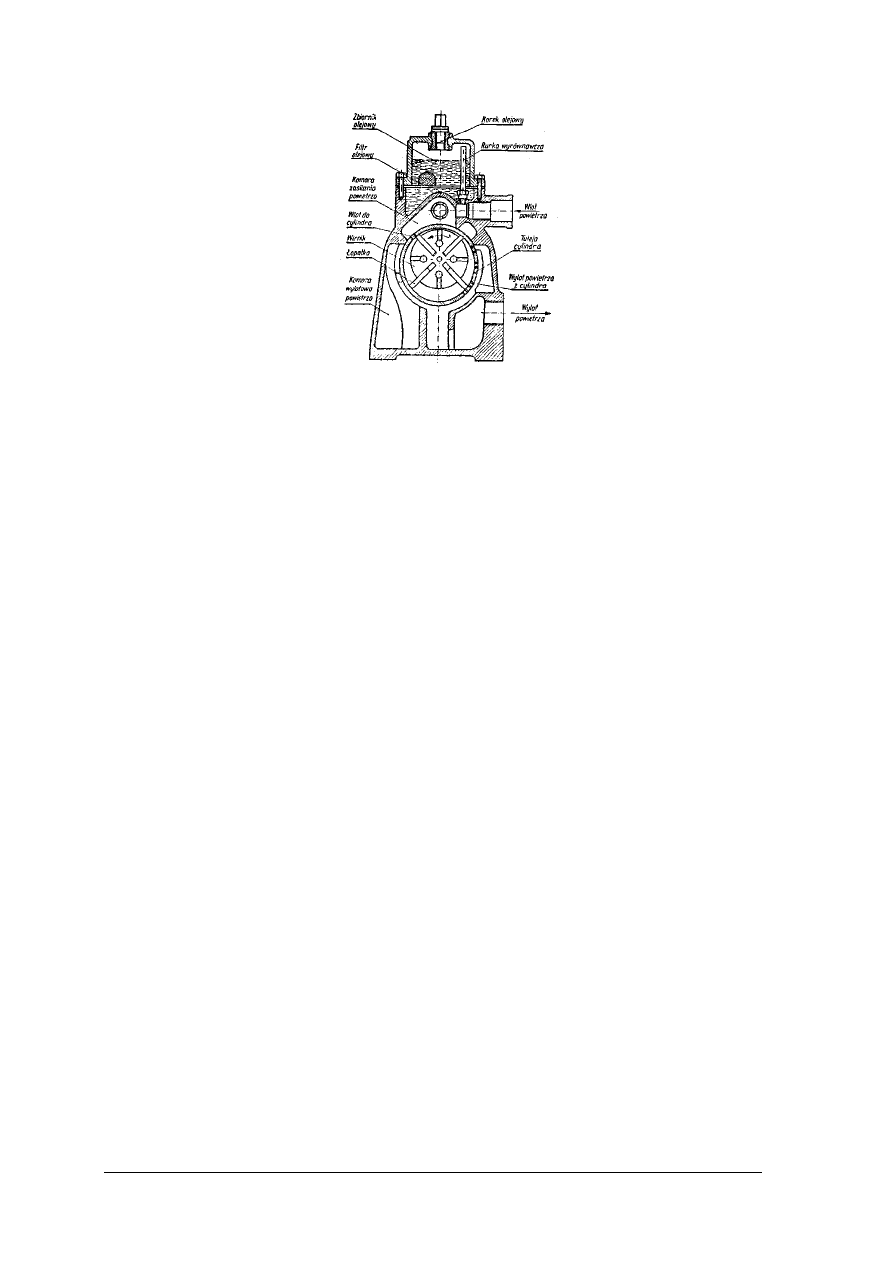
wentylatora z napędem pneumatycznym przedstawia rys. 21. Do kadłuba w kształcie walca
składającego się z dwóch
części 1 i 2 umocowany jest człon kierowniczy 3 stanowiący krótki
odcinek rury. Wirnik 4 wentylatora osadzony jest w obsadzie 5. Łopatki wirnika połączone są
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
pierścieniem 6, na którego zewnętrznej stronie znajduje się wytoczenie, a w nim duża liczba
małych łopatek 7 turbinki pneumatycznej. Na łopatki działa strumień powietrza sprężonego
doprowadzonego jedną z dwóch dysz S lub 9. Czynna jest zawsze tylko jedna dysza, druga
natomiast stanowi rezerwę. Po obu stronach wirnika 4 znajdują się łopatki kierownicze 10.
Pod działaniem powietrza sprężonego następuje obracanie się wirnika, którego piasta
ułoży skowana jest na nieruchomej osi 11. Smarowanie łożysk odbywa się za pomocą
smarownicy 12 przez przewód 13 i kanaliki wydrążone w osi 11. Do wentylatora, po
przeciwnej stronie niż człon kierowniczy, przymocowuje się lutnię 14. Wentylator
zabudowuje się w taki sposób, aby człon kierowniczy znajdował się od strony wlotu
powietrza do wentylatora.
Rys. 21. Wentylator lutniowy z napędem pneumatycznym. [2, s. 123]
Przewietrzanie lutniociągiem może być ssące, tłoczące lub kombinowane. Odległość
lutniociągu od czoła przodka nie może być większa niż:
−
w polach niemetanowych i niezagrożonych wyrzutami gazów i skał – 10 m,
−
w polach metanowych lub zagrożonych wyrzutami gazów i skał:
−
przy wentylacji ssącej – 6 m,
−
przy wentylacji tłoczącej lub kombinowanej – 8 m.
4.2.2.
Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Co zaliczamy do maszyn powietrznych (pneumatycznych)?
2.
Jakie są przyczyny stosowania wielostopniowych sprężarek tłokowych?
3.
Gdzie są wykorzystywane i jakie zadania realizują chłodziarki międzystopniowe?
4.
Czy sprężarki odśrodkowe wymagają chłodzenia? Dlaczego?
5.
Co to jest otwór równoznaczny kopalni i do czego jest wykorzystywany?
6.
Jak realizowana jest regulacja wydajności głównego wentylatora odśrodkowego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
4.2.3.
Ćwiczenia
Ćwiczenia 1
Zapoznaj się z budową wiertarki powietrznej, zidentyfikuj elementy wiertarki i omów ich
przeznaczenie.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
dokonać oględzin i nazwać oraz określić przeznaczenie elementów zewnętrznych,
2)
zdemontować maszynę zwracając uwagę na zachowanie kolejności operacji, zgodnie
z dokumentacją maszyny,
3)
nazwać poszczególne elementy i określić typ silnika napędowego zastosowanego
w maszynie,
4)
przeprowadzić konserwację zgodnie z instrukcją,
5)
zmontować maszynę.
Wyposażenie stanowiska pracy:
−
wiertarka pneumatyczna, dowolnego typu,
−
dokumentacja i instrukcja serwisowa maszyny,
−
narzędzia,
−
fartuch roboczy.
Ćwiczenie 2
Dla wentylatora osiowego obliczyć wydajność Q, moc użyteczną wentylatora P
u
oraz moc
silnika napędowego P
w
dla następujących danych:
−
ś
rednica zewnętrzna wirnika d
2
= 800 mm,
−
osiowa prędkość przepływu gazu v =10m/s,
−
całkowity przyrost ciśnienia gazu wytworzony przez wentylator
∆
p = 1,5 kPa,
−
sprawność ogólna (dla wentylatorów osiowych
η
= 0,1–0,3)
η
= 0,2.
Do obliczeń wykorzystaj wzór doświadczalny :
2
1, 3
Q
d
v
=
⋅
[m]
oraz zależności:
P
u
=Q •
∆
p [W],
0
w
Q
p
P
η
⋅∆
=
[W].
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeliczyć dane (jednostki) do wartości stosowanych we wzorach,
2)
przekształcić wzory stosownie do obliczanej wielkości,
3)
podstawić dane i wykonać obliczenia,
4)
przedstawić wyniki.
Wyposażenie stanowiska pracy:
−
materiały do pisania,
−
kalkulator.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Ćwiczenie 3
Podłącz elektryczny wentylator lutniowy i wykonaj pomiary różnicy ciśnień oraz
prędkości przepływu powietrza w układzie wentylatora tłoczącego i ssącego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z instrukcją opracowaną dla stanowiska na którym realizujesz ćwiczenie,
ś
ciśle przestrzegać przepisów bezpieczeństwa,
2)
zgodnie z zaleceniami prowadzącego zajęcia podłączyć wentylator oraz określoną liczbę
lutni spiralnych,
3)
sprawdzić prawidłowość zainstalowanych osłon, zgodnie z przepisami BHP,
4)
zgłosić prowadzącemu wykonanie pierwszej części ćwiczenia,
5)
po sprawdzeniu poprawności podłączenia, na polecenie prowadzącego ćwiczenie,
załączyć wentylator,
6)
wykonać pomiary przepływu powietrza i różnicy ciśnień,
7)
zapisać wyniki i opracować wnioski z ćwiczenia.
Wyposażenie stanowiska pracy:
−
anemometr,
−
manometr różnicowy,
−
narzędzia,
−
materiały do pisania.
Ćwiczenie 4
Podłącz wentylator lutniowy z napędem pneumatycznym i wykonaj pomiary różnicy
ciśnień oraz prędkości przepływu powietrza.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
zapoznać się z instrukcją opracowaną dla stanowiska na którym realizujesz ćwiczenie,
ś
ciśle przestrzegać przepisów bezpieczeństwa,
2)
zgodnie z zaleceniami prowadzącego zajęcia podłączyć wentylator oraz określoną liczbę
lutni spiralnych,
3)
sprawdzić prawidłowość zainstalowanych osłon, zgodnie z przepisami BHP,
4)
zgłosić prowadzącemu wykonanie pierwszej części ćwiczenia,
5)
po sprawdzeniu poprawności podłączenia, na polecenie prowadzącego ćwiczenie,
załączyć wentylator,
6)
wykonać pomiary przepływu powietrza i różnicy ciśnień,
7)
zapisać wyniki i opracować wnioski z ćwiczenia.
Wyposażenie stanowiska pracy:
−
anemometr,
−
manometr różnicowy,
−
narzędzia,
−
materiały do pisania.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
4.2.4.
Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
zdefiniować pojęcie maszyna pneumatyczna?
2)
omówić budowę silnika łopatkowego?
3)
określić jakie są przyczyny stosowania chłodziarek w sprężarkach
tłokowych wielostopniowych?
4)
rozróżnić elementy głównego wentylatora osiowego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
4.3.
Napędy hydrostatyczne
4.3.1.
Materiał nauczania
Urządzenia hydrauliki olejowej dzielimy na:
−
urządzenia napędowe,
−
sterujące i pomocnicze.
Do urządzeń napędowych należą pompy, silniki dla ruchu obrotowego, cylindry
hydrauliczne. Do urządzeń sterujących należą zawory, rozdzielacze, dozowniki i zamki
hydrauliczne. Urządzenia pomocnicze stanowią przewody, złącza, zbiorniki, filtry,
akumulatory hydrauliczne oraz uszczelnienia. Stosowanie hydrauliki olejowej w maszynach
górniczych jest uzasadnione możliwością łatwego dostosowania do trudnych warunków pracy
w górnictwie. Z tych względów prawie każda nowoczesna maszyna górnicza wyposażona jest
w napędowe i sterujące układy hydrauliczne.
W silniku hydraulicznym energia cieczy
doprowadzanej do silnika w postaci ciśnienia przemienia się w energię mechaniczną
przekazywaną obracającemu się wałowi silnika. Silniki hydrauliczne mogą być zębate,
łopatkowe, tłokowe promieniowe i tłokowe osiowe. Silniki zębate w zasadzie nie różnią się
od pomp zębatych i w praktyce każda pompa zębata może pracować jako silnik. Również
i silniki łopatkowe podobne są budową swoją do pomp łopatkowych. Znacznie szersze
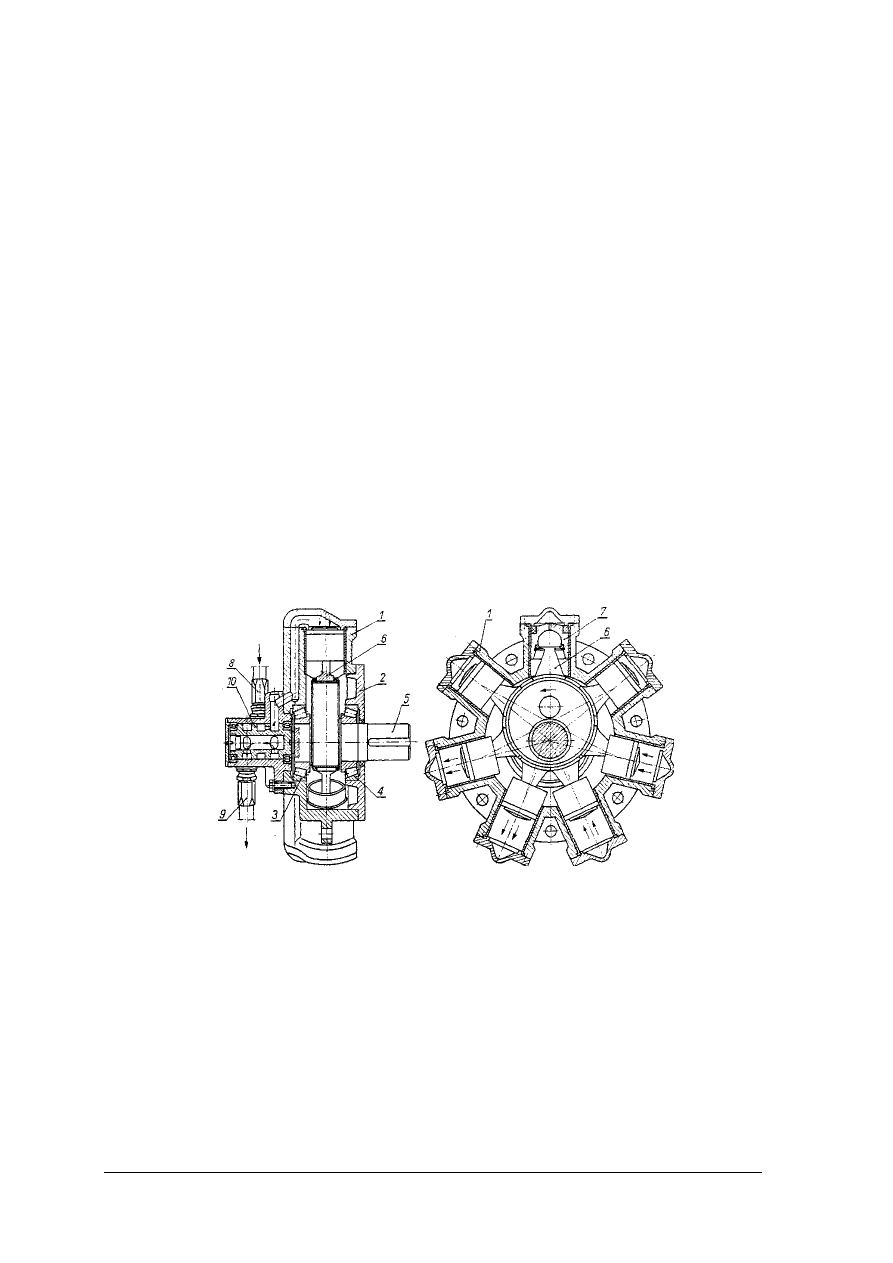
zastosowanie w maszynach górniczych znalazły silniki tłokowe. Silniki tłokowe budowane
specjalnie dla potrzeb górnictwa przedstawia rysunek 22. Silniki te buduje się jako
jednorzędowe lub dwurzędowe w różnych wielkościach.
Rys. 22. Silnik hydrauliczny tłokowy w przekrojach [2, s. 158]
W żeliwnym kadłubie 1 silnika oraz pokrywie 2 osadzone są dwa łożyska stożkowe 3 i 4
utrzymujące mimośrodowy wał 5. Do mimośrodowej części wału przylegają stopy
korbowodów 6. Korbowody osadzone są w gniazdach tłoków 7. Uszczelnienia tłoków
w cylindrach wykonano za pomocą olejoodpornych uszczelek gumowych typu U lub w innej
odmianie za pomocą żeliwnych pierścieni. Cylindry zakryte są głowicami, w których
wykonane są kanały dla doprowadzenia oleju pod ciśnieniem i odprowadzenia oleju do
przewodu odpływowego. Olej doprowadzany i odprowadzany jest z silnika przewodami 8
i 9 i dopływa następnie do obrotowego rozdzielacza 10. Rozdzielacz, na którego wałku
wykonane są kanały, obracany jest wałem silnika. Kanały w miarę obracania się wałka łączą
poszczególne cylindry z zasilaniem lub wypływem oleju. Silniki dwurzędowe tym się różnią
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
od silników jednorzędowych, że ich cylindry są rozmieszczone w dwóch przesuniętych
rzędach. Silniki te cechuje bardziej zwarta budowa i bardziej równomierna praca. Wały takich
silników mają dwa mimośrody przesunięte względem siebie o 180°.
Cylinder hydrauliczny siłowy (siłownik) jest silnikiem którym następuje zamiana energii
ciśnienia cieczy na mechaniczną energię ruchu postępowego lub postępowo-zwrotnego.
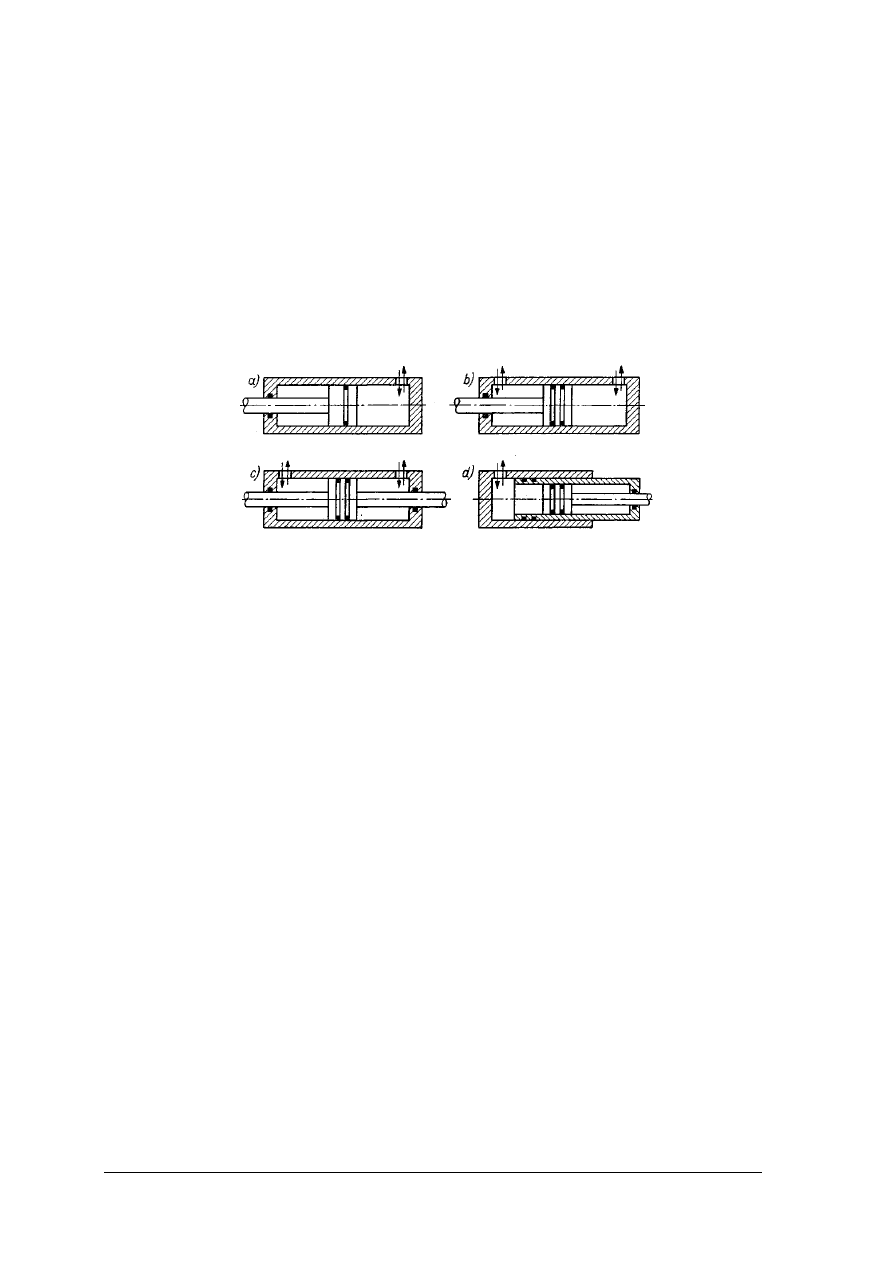
Cylindry siłowe (rys. 23) dzieli się na cztery zasadnicze grupy:
−
jednostronnego działania (rys. 23a),
−
dwustronnego działania z jednostronnym tłoczyskiem (rys. 23b),
−
dwustronnego działania z dwustronnym tłoczyskiem (rys. 23c),
−
teleskopowe (rys. 23d).
Rys. 23. Schematy cylindrów hydraulicznych siłowych [2, s. 156]
Cylinder jednostronnego działania najczęściej jest konstruowany jako nurnikowy. Ruch jest
wymuszony ciśnieniem cieczy tylko w jednym kierunku. Ruch w kierunku powrotnym
odbywa się pod działania mechanicznego, np. siły ciężkości maszyny lub siły napiętej
sprężyny. Cechuje się prostą konstrukcją oraz łatwym sterowaniem.
Cylinder dwustronnego działania z jednostronnym tłoczyskiem wykonuje ruch w obu
kierunkach jednak z różnymi prędkościami przy tym samym natężeniu dopływu cieczy do
cylindra. Cylinder dwustronnego działania z dwustronnym tłoczyskiem, dzięki równym
powierzchniom tłoka z obu stron ma tę samą prędkość ruchu w obu kierunkach. Cylindry
dwustronnego działania stosuje się, tam gdzie zachodzi konieczność wymuszenia określonej
siły lub prędkości ruchu w obu kierunkach.
Cylinder teleskopowy charakteryzuje to, że przesunięcie jednego tłoka działa na drugi tłok
lub cylinder, uzyskuje się przez to zwiększenie długości skoku.
Dzięki prostej konstrukcji, pewności ruchu, możliwości uzyskania dużych sił przy małych
i regulowanych
prędkościach
przemieszczania,
cylindry
hydrauliczne
powszechnie
wykorzystuje się w maszynach i urządzeniach górniczych do przemieszczania organów
urabiających, podnoszenia maszyn, przesuwania przenośników, popychania wozów itp.
Stanowią one również podstawowe elementy indywidualnej i zmechanizowanej obudowy
górniczej
.
Układy sterowania i regulacji. W układach hydraulicznych w celu wymuszenia zmian
parametrów fizycznych (ciśnienia, natężenia przepływu, prędkości ruchu, do rozdzielania
strumienia cieczy itp ) stosuje się różnego rodzaju urządzenia do regulacji i sterowania.
Podstawowe elementy regulacji i sterowania stosowane w układach hydraulicznych to
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
wszelkie rodzaje zaworów(stanowiące najliczniejszą grupę), suwaki, dławiki, przekaźniki,
automatyczne regulatory. Zawory w zależności od rodzaju budowy dzieli się na:
−
kulowe,
−
grzybkowe,
−
suwakowe,
a w zależności zaś od przeznaczenia, na:
−
zawory bezpieczeństwa,
−
przelewowe,
−
zwrotne,
−
redukcyjne,
−
rozdzielacze,
−
zawory ograniczające przepływ.
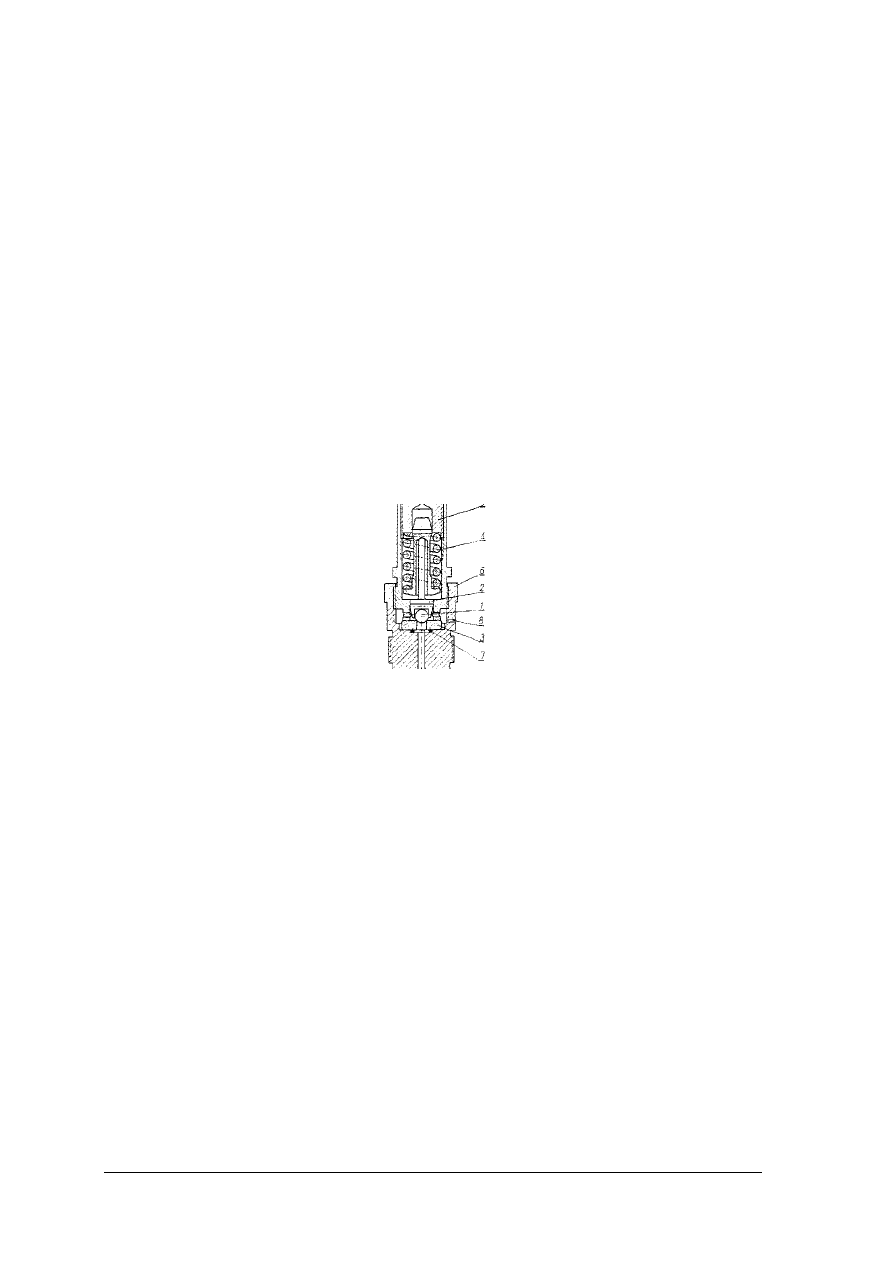
Zawory bezpieczeństwa należą do najważniejszych w układach hydraulicznych. Zadaniem
ich jest niedopuszczenie do niebezpiecznego wzrostu ciśnienia cieczy w układzie, które
mogłoby spowodować uszkodzenie układu lub całej maszyny. Przykład budowy zaworu
bezpieczeństwa pokazano na rys. 24.
Rys. 24. Zawór bezpieczeństwa. [2, s. 160]
Kula 1 centrowana prowadnikiem 2 dociskana jest do gniazda 3 siłą napięcia
sprężyny 4. Napięcie sprężyny nastawia się nakrętką 5. Gniazdo uszczelnione jest
w kadłubie 6 uszczelką 7. Kadłub 6 zaworu wkręcany jest w pompę lub przewód
hydrauliczny, w którym znajduje się ciecz pod ciśnieniem. Jeżeli ciśnienie nie jest duże,
sprężyna 4 dociska kulę 1 do gniazda 3. Jeżeli natomiast ciśnienie cieczy wzrośnie ponad
wartość dopuszczalną, siła ciśnienia cieczy przezwycięża napięcie sprężyny, podnosi kulkę i
ciecz przedostaje się przez otwór 8 do zbiornika.
Zawory przelewowe budową przypominają zawory bezpieczeństwa, zadaniem zaworów
przelewowych jest utrzymywanie stałego ciśnienia cieczy w układzie.
Zawory zwrotne pozwalają na przepuszczanie cieczy tylko w jednym kierunku. Mogą być
one instalowane na kanałach lub przewodach ssawnych (zawory zwrotne ssawne) albo też
tłocznych (zawory zwrotne tłoczne).
Rozdzielacze mają za zadanie:
−
skierowanie strumienia cieczy z pompy do silnika,
−
odprowadzanie cieczy z silników do zbiornika i do podobnych celów.
Rozdzielacze mogą być obrotowe (element rozdzielający wykonuje ruch obrotowy) lub
suwakowe (element rozdzielający wykonuje ruch postępowo-zwrotny).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
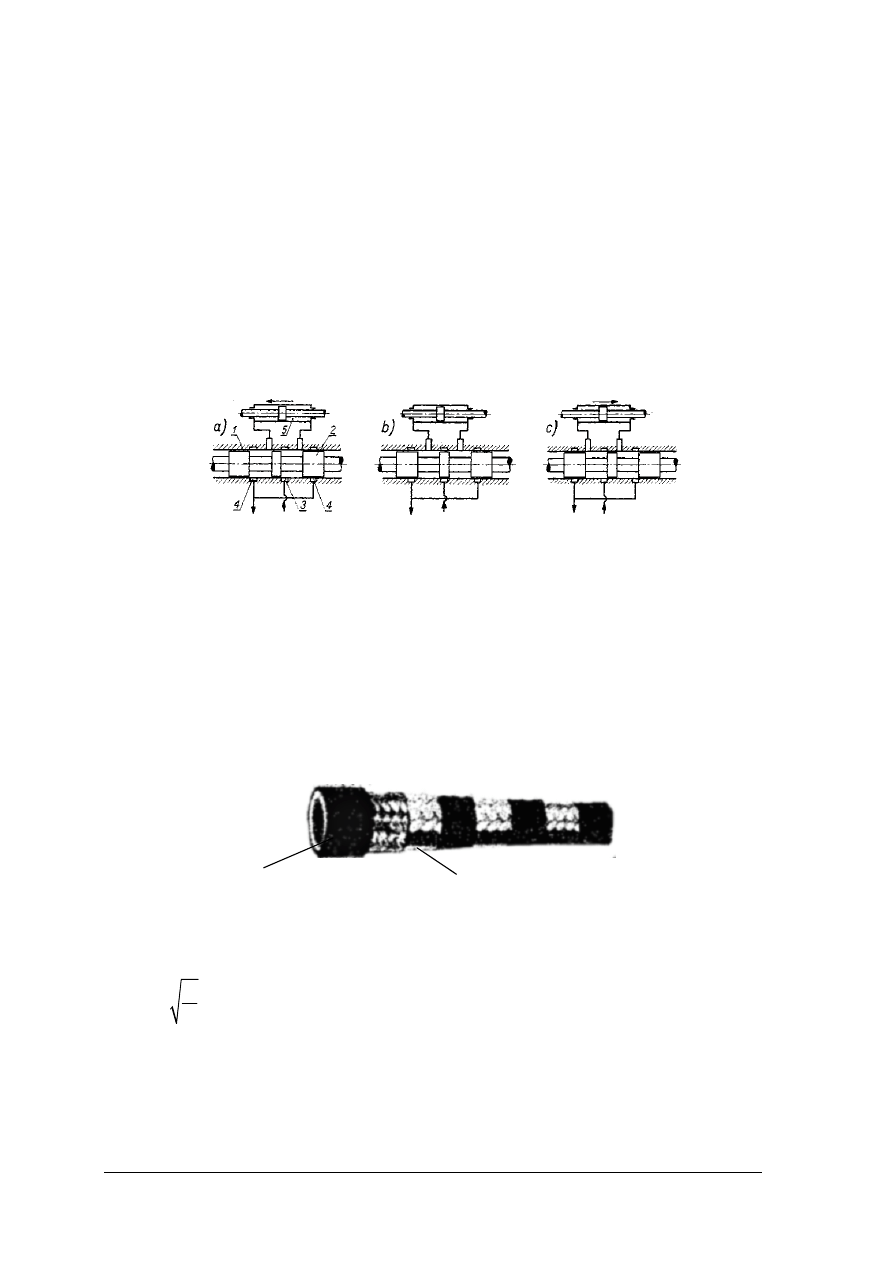
Na rys. 25 przedstawiono schemat działania rozdzielacza suwakowego, służącego do
zmiany kierunku przepływającej cieczy. W cylinderku 1 rozdzielacza znajduje się
suwak 2 z odpowiednimi wytoczeniami, który może zajmować trzy różne położenia (pozycje
a, b, c). Do środkowego kanalika 3 od dołu doprowadzona jest ciecz z pompy, a dwa
zewnętrzne kanaliki 4 połączone są ze zbiornikiem cieczy. Dwa kanały od góry połączone są
z cylindrem siłowym 5 (lub z innym odbiornikiem). Gdy cylinderek rozdzielacza zajmuje
położenie jak na rys. 25a, pompa tłoczy olej do prawej strony cylindra siłowego i tłok tego
cylindra przesuwa się w lewo. Gdy cylinder rozdzielacza zostanie przesunięty w prawe
skrajne położenie (rys.
25c), pompa tłoczy olej do lewej strony cylindra siłowego i tłok tego
cylindra przesuwa się w prawo. Gdy cylinder rozdzielacza zostanie ustawiony w położeniu
ś
rodkowym (rys. 25b), dopływ i odpływ cieczy jest odcięty i tłok cylindra siłowego nie
wykonuje żadnego ruchu
.
Rys. 25. Rozdzielacz suwakowy trój położeniowy do zmiany kierunku. [2, s. 160]
Elementy pomocnicze. Elementy pomocnicze układów hydraulicznych stanowią
uzupełnienie instalacji, umożliwiając jej sprawne funkcjonowanie. Zaliczamy do nich
przewody, złącza, zbiorniki, filtry, akumulatory hydrauliczne, uszczelnienia i inne. Przewody
mogą być sztywne lub giętkie. Sztywne wykonuje się ze stali, miedzi lub aluminium.
Przewody giętkie stosuje się z olejoodpornej gumy, siatkę z drutu stalowego. Liczba
przekładek jest uzależniona od średnicy przewodu i ciśnienia na jakie jest przeznaczony.
Budowę przewodu giętkiego przedstawia rys. 26, na którym oznaczono przez: 1 –wąż z gumy
syntetycznej, 2 –siatkę plecioną z drutu stalowego.
Rys. 26. Przewód ciśnieniowy giętki. [2, s. 161]
Ś
rednicę wewnętrzną przewodu można obliczyć z wzoru
Q
d
v
=
[mm]
gdzie:
Q –natężenie przepływu cieczy, dm
3
/min, v –maksymalna prędkość przepływu, m/s.
Maksymalną prędkość przepływu dla przewodów ssawnych przyjmuje się 0,5 do 1,5 m/s,
2 do 3 m/s dla przewodów spływowych i 3 do 6 m/s dla przewodów tłocznych.
1
2
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
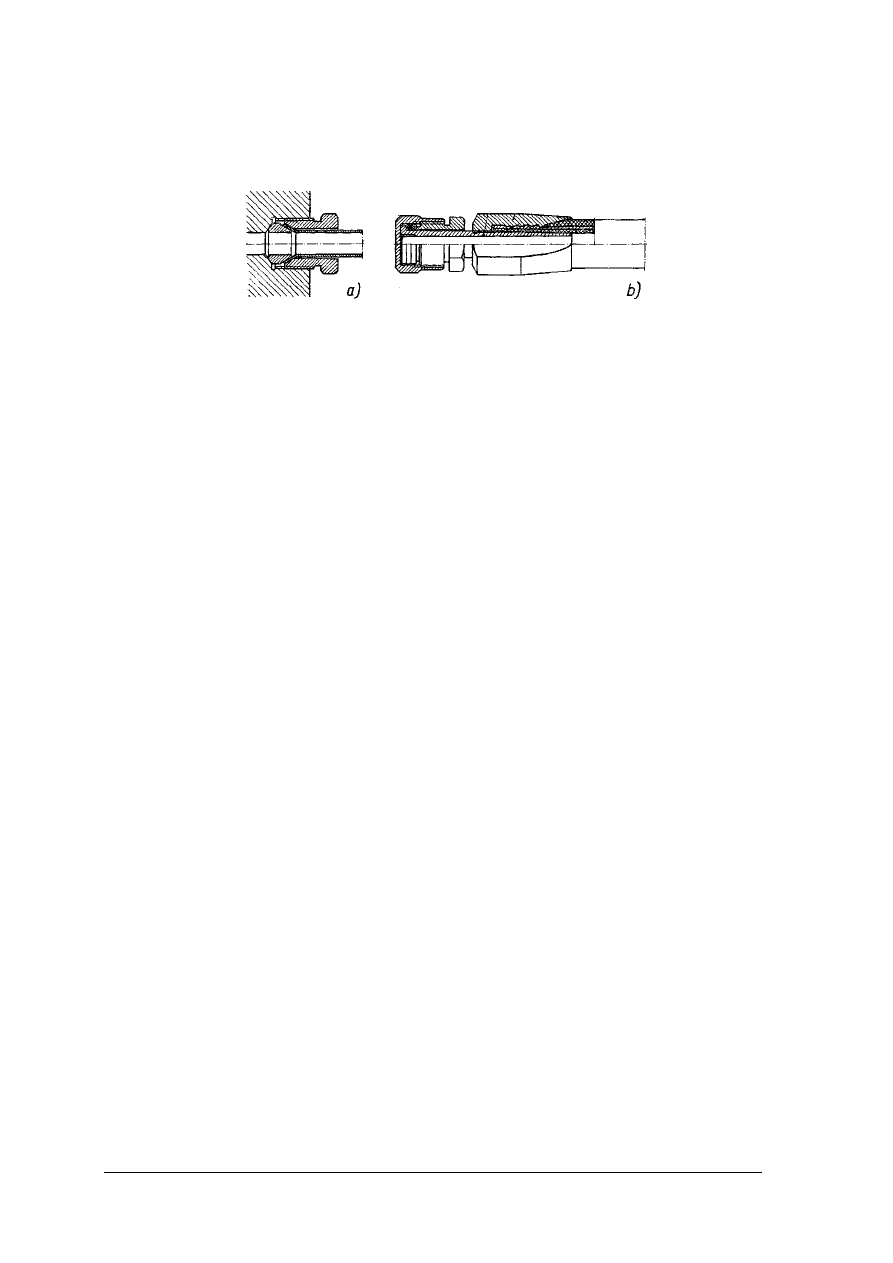
Złącza służą do łączenia przewodów między sobą, pomiędzy kadłubami,zbiornikami
i elementami maszyn. Na rys. 27a pokazano połączenie złącza z przewodem sztywnym
i z przewodem giętkim rys. 27b.
Rys. 27. Złącza a) przewodu sztywnego, b) przewodu giętkiego [2, s. 161]
Zalecenia eksploatacyjne dla urządzeń hydrauliki ze względu na precyzję wykonania,
a tym samym koszt urządzeń, oraz stopień skomplikowania prawidłowe ich działanie oraz
trwałość można osiągnąć tylko przez właściwą obsługę i konserwację. Należy przestrzegać
następujących zasad postępowania:
−
cieczą roboczą może być tylko taka ciecz, jaka jest przewidziana w instrukcji obsługi
danego urządzenia;
−
nie wolno mieszać różnych olejów i takiej mieszaniny stosować do choćby najprostszych
układów hydraulicznych;
−
należy dbać o to, aby poziom oleju w zbiorniku był zgodny z instrukcją; zbyt mała ilość
oleju może spowodować zasysanie przez pompę powietrza i zatarcie pompy;
−
szczególnie ważne jest zachowanie bardzo dokładnego poziomu oleju w sprzęgłach
hydraulicznych i niedopuszczanie do częstych i długotrwałych nadmiernych poślizgów,
gdyż powoduje to nadmierne przegrzanie oleju;
−
należy dbać szczególnie o czystość układu hydraulicznego; olej należy wlewać przez filtr;
−
nie wolno regulować zaworów bezpieczeństwa bez stosowania specjalnych przyrządów
pomiarowych (manometrów), a zwłaszcza nie wolno nastawiać tych zaworów na
ciśnienia wyższe niż przewiduje instrukcja;
−
nie wolno dopuszczać do częstego przeciążania układu i długotrwałej pracy zaworów
bezpieczeństwa, gdyż grozi to przegrzaniem oleju.
Przestrzeganie instrukcji i powyższych zasad pozwoli na prawidłową i trwałą
eksploatację urządzenia.
4.3.2.
Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Co zaliczamy do hydraulicznych urządzeń hydrauliki olejowej?
2.
Co zaliczamy do pomocniczych elementów hydrauliki olejowej?
3.
Co zaliczamy do urządzeń sterowania i regulacji hydrauliki olejowej?
4.
Czy pompa zębata może pracować jako silnik hydrauliczny?
5.
Jak dzielimy zawory hydrauliki olejowej ze względu na przeznaczenie?
6.
Jak realizowana zadania realizuje rozdzielacz hydrauliki olejowej?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
4.3.3.
Ćwiczenia
Ćwiczenie 1
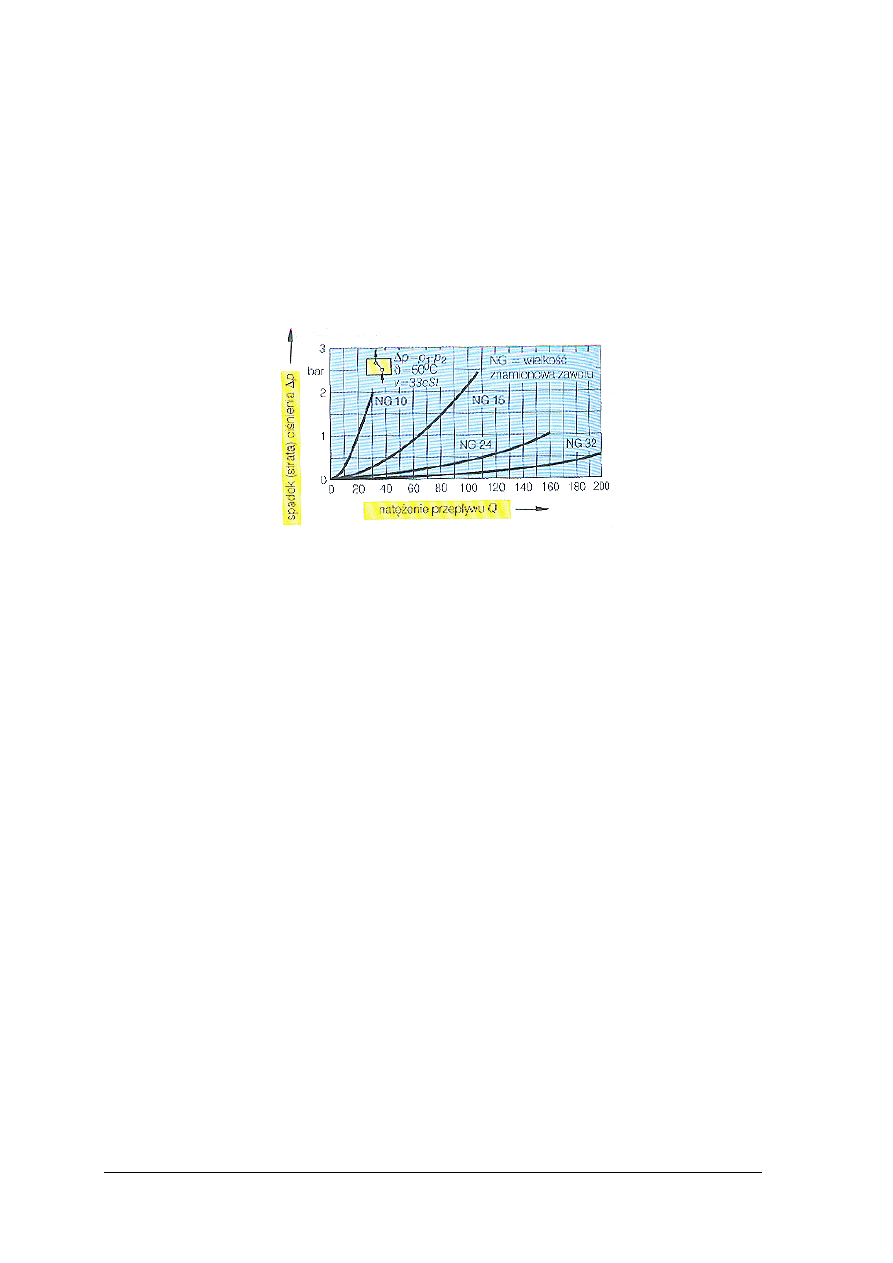
Dla siłownika hydraulicznego, w którym chcemy uzyskać maksymalną prędkość,
konieczne jest aby objętościowe natężenie przepływu wynosiło, Q = 100 l/min. Do dyspozycji
masz rozdzielacze NG15,NG24, NG32.
−
Jakie straty ciśnienia
∆
p wystąpią na każdym nich?
−
Jakie straty mocy P
s
= Q*
∆
p wystąpią na każdym nich?
−
Porównaj z sobą rozdzielacze.
Rysunek do ćwiczenia 1. Charakterystyka rozdzielaczy [5]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
na podstawie charakterystyki rys. 28 określić spadek ciśnienia
∆
p,
2)
obliczyć straty mocy P
s
,
3)
porównać z sobą rozdzielacze,
4)
przedstawić wyniki i wnioski.
Wyposażenie stanowiska pracy:
−
materiały do pisania,
−
charakterystyka rozdzielacza.
Ćwiczenie 2
Przy pomocy siłownika hydraulicznego chcemy uzyskać nacisk o sile 20 kN przy
prędkości tłoka v = 0,5 m/s.
−
określ wartość mocy mechanicznej P siłownika,
−
określ wartość ciśnienia p,
−
objętościowe natężenie przepływu Q,
przy założeniu że moc mechaniczna jest równa hydraulicznej (nie uwzględniamy strat na
tarcie), jeżeli średnica tłoka d = 80 mm.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
wykorzystać stosowne wzory i przekształcić do wymaganej postaci,
2)
wykonać obliczenia,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
3)
zweryfikować wynik,
4)
przedstawić wyniki i wnioski.
Wyposażenie stanowiska pracy:
−
materiały do pisania,
−
kalkulator.
4.3.4.
Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
przedstawić zasadę działania tłokowego silnika hydraulicznego?
2)
omówić budowę pompy zębatej?
3)
przedstawić schematy siłowników hydraulicznych?
4)
określić zalecenia eksploatacyjne dla urządzeń hydrauliki?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
4.4.
Napęd elektryczny maszyn
4.4.1.
Materiał nauczania
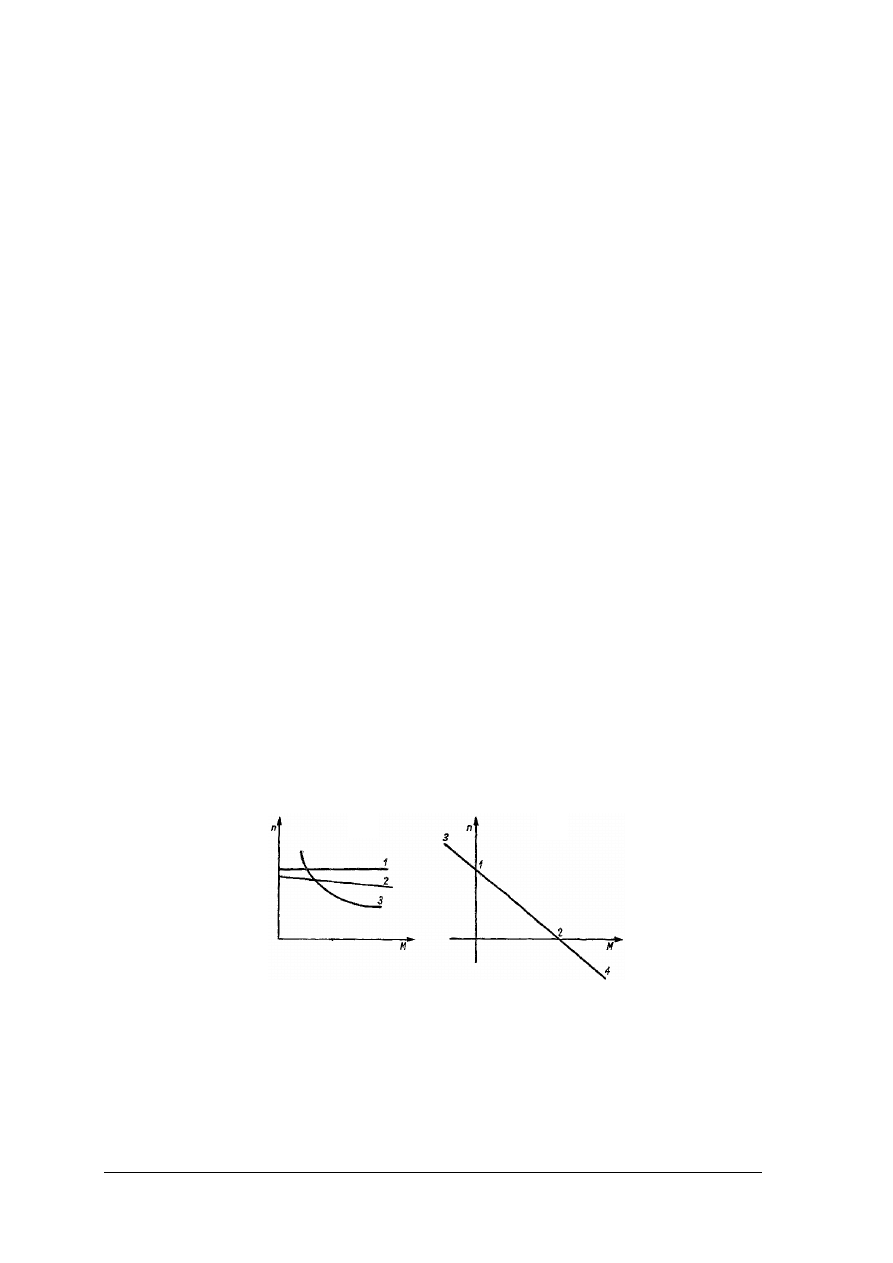
Charakterystyką mechaniczną silnika elektrycznego nazywa się wykres przedstawiający
zależność prędkości obrotowej n silnika od rozwijanego przez silnik momentu obrotowego
M lub prądu twornika I
t
(dla maszyn prądu stałego). W przypadku silników indukcyjnych
charakterystyka mechaniczna może być również przedstawiona w postaci przebiegu M = f (n)
lub M = f (s), gdzie s jest poślizgiem wirnika.
Charakterystyki mechaniczne silników elektrycznych pozwalają na prawidłowy dobór silnika
do napędu maszyny roboczej. Przebieg charakterystyki mechanicznej silnika zależy od:
−
parametrów konstrukcyjnych silnika,
−
sposobu przyłączenia silnika do sieci,
−
wartości rezystancji włączonych do obwodów układu.
Przyjmując za podstawę zmiany prędkości obrotowej silnika przy rosnącym obciążeniu na
wale możemy wyróżnić następujące rodzaje charakterystyk:
−
charakterystyka synchroniczna, prędkość obrotowa nie zależy od obciążenia i jest stała
przy wszystkich wartościach momentu rozwijanego na wale silnika; charakterystykę taką
posiada silnik synchroniczny i silnik indukcyjny synchronizowany;
−
charakterystyka bocznikowa, prędkość obrotowa zależy od obciążenia, ale przy
przejściu od biegu jałowego do obciążenia znamionowego spadek prędkości nie
przekracza 10%; charakterystykę bocznikową nazywa się charakterystyką sztywną;
charakterystykę taką posiadają silniki bocznikowe prądu stałego i przemiennego oraz
silniki indukcyjne trójfazowe w zakresie roboczej części charakterystyki,
−
charakterystyka szeregowa, prędkość obrotowa silnika zmniejsza się znacznie przy
wzroście obciążenia; charakterystyka taka nosi nazwę charakterystyki miękkiej,
charakteryzują się nią silniki szeregowe prądu stałego i przemiennego oraz silniki
repulsyjne.
Rys. 29 przedstawia charakterystyki mechaniczne silnika wykreślone w układzie (M,n).
Odcinki charakterystyk leżące w poszczególnych ćwiartkach odpowiadają różnym stanom
pracy silnika rys. 29b.
Rys. 29. a) Charakterystyki mechaniczne silników elektrycznych : 1 – synchroniczna, 2 – bocznikowa,
3 – szeregowa, b) charakterystyka mechaniczna silnika w układzie współrzędnych prostokątnych odcinek:
1–2 praca silnikowa, 1–3 praca prądnicowa, 2–4 – praca hamulcowa [3, s. 65]
Dla silnika elektrycznego wyróżniamy następujące stany pracy:
−
stan pracy silnikowej, moment obrotowy silnika jest zgodny z kierunkiem ruchu, silnik
pobiera energię elektryczną z sieci i oddaje energię mechaniczną na wale;
a
b
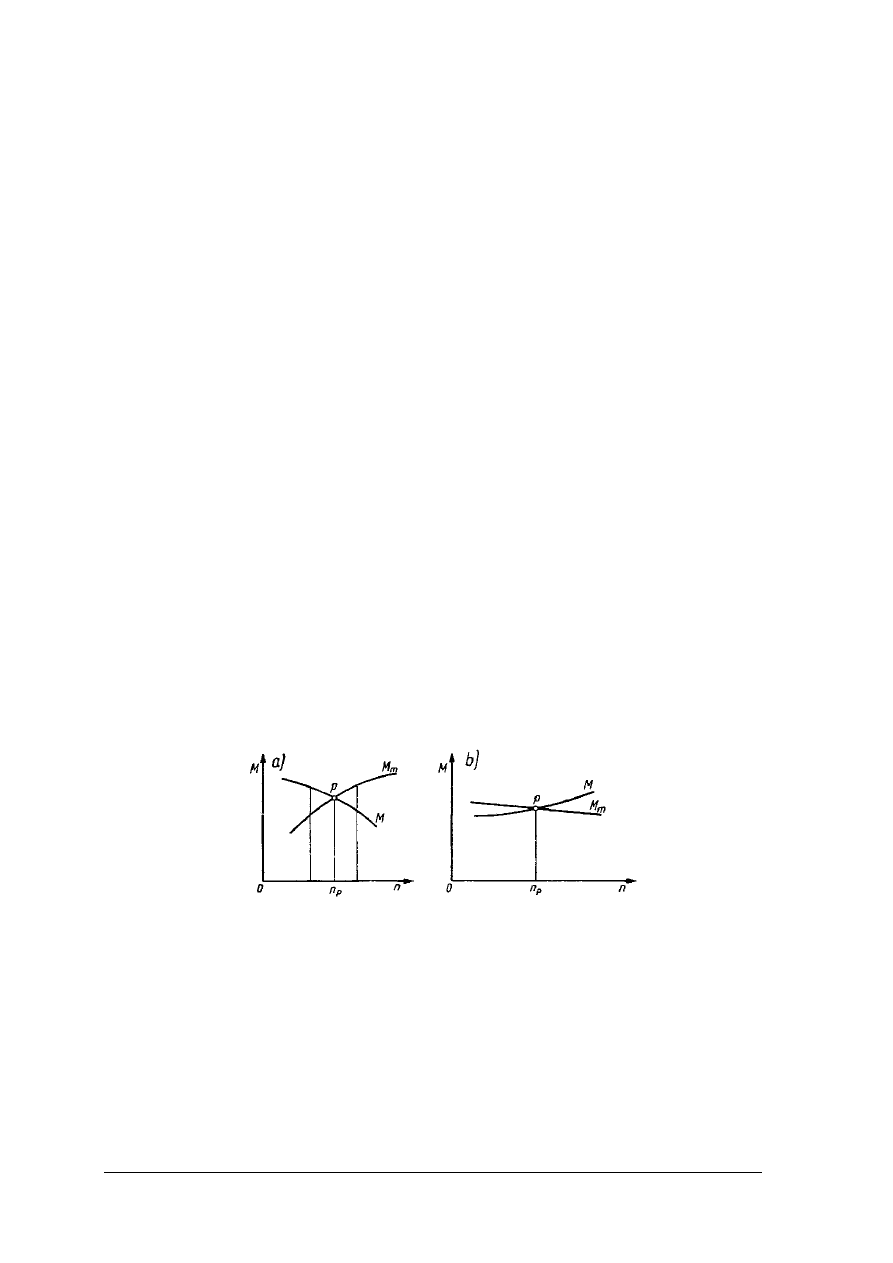
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
−
stan pracy prądnicowej, moment obrotowy silnika jest przeciwny do kierunku ruchu,
silnik pobiera energię mechaniczną na wale i oddaje energię elektryczną do sieci
zasilającej;
−
stan pracy hamowniczej, moment obrotowy silnika jest przeciwny do kierunku ruchu,
silnik pobiera z sieci energię elektryczną, która zamienia się w nim w ciepło.
Ogólne warunki pracy napędu Praca napędu jest poprawna, gdy układ napędowy znajduje
się w stanie ustalonym. Stanem ustalonym w pracy napędu elektrycznego nazywa się taki stan,
w którym prędkość obrotowa n i prędkość kątowa
ω
zespołu mają wartości stałe, co
oznaczamy: n=const. i
ω
=const.
W przypadku niespełnienia tych warunków, mamy do czynienia ze stanami
przejściowymi (nieustalonymi) w układzie napędowym. Występowanie stanów przejściowych
oznacza że napęd znajduje się w rozruchu, hamowaniu lub zmianie z jednej prędkości
obrotowej na drugą. Przyjmując że w układzie napędowym wystąpienie zakłócenia (np.
zmiana obciążenia) nie wpływa na charakterystyki mechaniczne silnika M=f(n) i napędzanej
maszyny Mm=f(n) to w przypadku wystąpienia zewnętrznego zakłócenia powodującego
wytrącenie układu napędowego ze stanu ustalonego mamy następujące możliwości
zachowania się napędu:
−
napęd będzie dążył do przywrócenia zachwianej równowagi,
−
napęd do stanu ustalonego powrócić nie może.
Napęd wytrącony ze stanu ustalonego samoczynnie dążący do przywrócenia zachwianej
równowagi nazywa się napędem statecznym. Charakterystyka na rys.30a przedstawia
charakterystyki mechaniczne napędu statecznego. Jeżeli pojawi się przyczyna, która
spowoduje, że bez zmiany charakterystyk mechanicznych prędkość obrotowa napędu
zwiększy się ponad wartość n
p
to, jak widać na wykresie, moment maszyny napędzanej M
m
wzrośnie, a moment obrotowy silnika elektrycznego M zmaleje. Powstająca nadwyżka
momentu oporowego wywołuje zmniejszenie prędkości obrotowej zespołu, aż dojdzie
ponownie do wartości n
p
. odpowiadającej punktowi pracy napędu (p na wykresie) w stanie
ustalonym.
Rys. 30. Charakterystyki mechaniczne napędu a) statecznego, b) niestatecznego;
M = f(n) – moment napędowy silnika, Mm = f(n) – moment obciążenia, p – punkt pracy [3, s. 67]
W przypadku gdy prędkość obrotowa zespołu zmaleje poniżej wartości n
p
, wówczas
samoczynnie zwiększony moment silnika M<M
m
spowoduje przyspieszenie zespołu, który
następnie osiągnie prędkość obrotową n
p
. Punkt pracy zespołu p jest punktem równowagi do
którego zespół dąży w przypadkach wytrącenia go ze stanu ustalonego przez zakłócenia
zewnętrzne. Napęd wyprowadzony ze stanu ustalonego nie mogący ponownie do niego
powrócić nazywa się napędem niestatecznym. Na rys. 30b przedstawiono charakterystyki
mechaniczne napędu niestatecznego. Dla przedstawionego układu zakłócenie, stanu
ustalonego napędu pociąga za sobą oddalenie się punktu pracy zespołu od punktu pracy
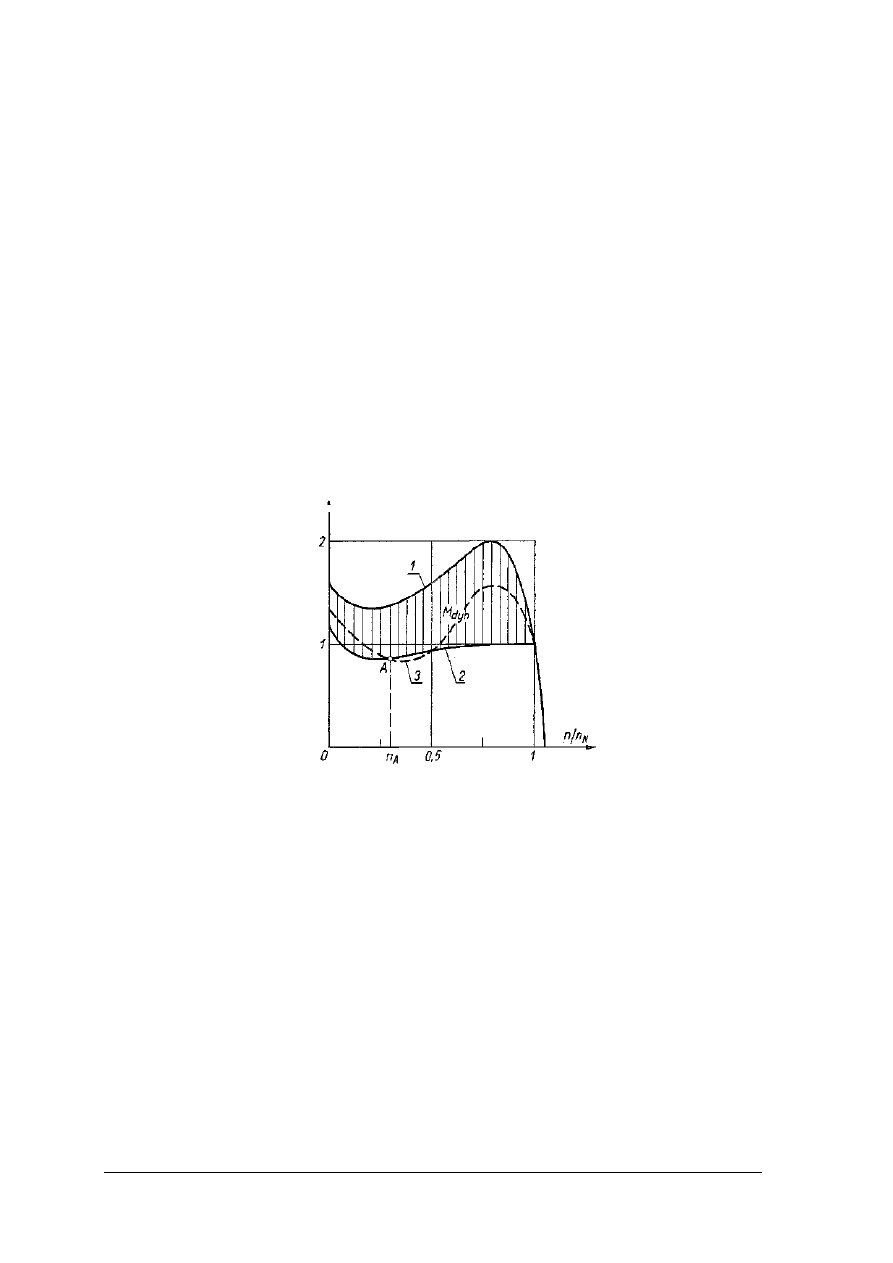
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
p w stanie ustalonym w tym samym kierunku, w którym nastąpiło odchylenie ze stanu
ustalonego.
Dynamika napędu.
Jeżeli napęd nie pracuje w stanie ustalonym, (M ≠M
m
) to może zaistnieć
następujący przypadek:
−
moment silnika M jest większy od momentu oporowego M
m
, (M>M
m
) i nadmiar
momentu rozwijanego przez silnik powoduje przyspieszenie biegu zespołu;
−
silnik nie jest zdolny pokonać momentu oporowego i wówczas przy (M<M
m
) następuje
hamowanie zespołu i zmniejszenie prędkości obrotowej.
Moment silnika dobiera się w taki sposób, by moment rozruchowy początkowy miał wartość
co najmniej 1,2 M
m
. Przy mniejszej wartości silnik może nie ruszyć przy spadku napięcia
w sieci. Moment dynamiczny silnika w okresie rozruchu powinien mieć możliwie stałą
wartość, aby rozruch przebiegał płynnie i z jednakowym przyspieszeniem. Przykład
dopasowania momentu silnika do momentu statycznego maszyny roboczej pokazano na
rys. 31. Na rysunku moment dynamiczny jest oznaczony za pomocą kreskowania, jest on
równy różnicy między momentem silnika a momentem mechanicznym napędzanej maszyny.
Rys. 31. Dopasowanie momentu silnika (M) do momentu statycznego(M
m
)
1 – charakterystyka silnika przy pełnym napięciu, 2 – moment statyczny,
3 – charakterystyka silnika o zbyt małym momencie minimalnym [7, s. 132]
Niektóre silniki klatkowe mają charakterystykę momentu wygiętą w kształcie siodła. Wartość
minimalnego momentu nie może być zbyt mała, gdyż może to powodować przy spadku
napięcia nieukończenie rozruchu. Przypadek taki przedstawia krzywa 3 na rys. 31. Przy
spadku napięcia moment silnika zmniejsza się proporcjonalnie do kwadratu napięcia. Krzywa
momentu silnika przecina krzywą momentu statycznego w punkcie A przy prędkości
ok. 0,3 n
A
. Prędkość ustala się. Prąd pobierany przez silnik z sieci jest tylko nieznacznie
mniejszy od prądu początkowego wskutek czego silnik silnie nagrzewa się i po upływie
krótkiego czasu ulega uszkodzeniu.
Napęd pomp i wentylatorów. Pompy tłokowe wykorzystują mechanizm korbowy co
skutkuje tym, że ich moment statyczny w czasie jednego obrotu jest zmienny. Moment
napędowy silnika przybiera wartości mniejsze lub większe od średniego momentu
statycznego. Przebieg zmienności momentów w czasie jednego obrotu jest przedstawiony na
rys. 32. Moc zapotrzebowaną przez pompę tłokową oblicza się ze wzoru:
M
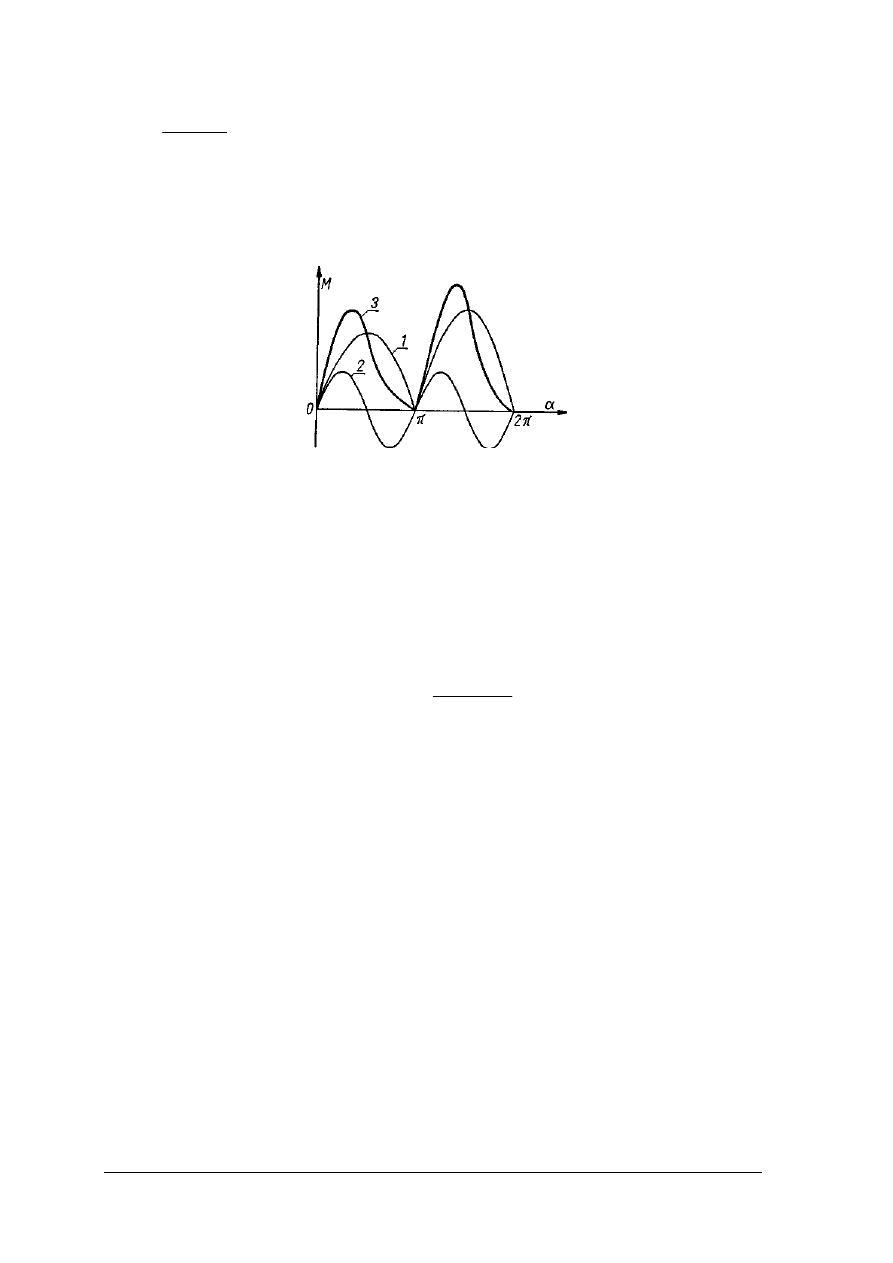
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
p
m
Q H
P
k
γ
η η
⋅ ⋅
= ⋅
[kW]
w którym: P – moc zapotrzebowana, w kW; Q – wydajność pompy w m
3
/s; H –całkowita
wysokość podnoszenia, w m;
γ
– ciężar właściwy cieczy, w N/m
3
;
η
p
– sprawność pompy
zawierająca się w granicach 0,5÷0,8;
η
m
–sprawność przekładni między silnikiem a pompą;
k – współczynnik rezerwy wynoszący 1,1÷1,3.
Rys. 32. Przebieg momentów na wale silnika napędzającego pompę tłokową w zależności od kąta obrotu korby
α
; 1 – moment statyczny, 2 – moment dynamiczny, 3 – moment silnika [7, s. 131]
Do napędu pomp tłokowych są stosowane silniki indukcyjne klatkowe oraz pierścieniowe,
a także w przypadku dużych mocy, silniki synchroniczne, aby ułatwić rozruch pomp,
powinien on odbywać się przy otwartych zaworach, bez przeciwciśnienia.
Moment statyczny
pompy odśrodkowej ma przebieg równomierny i proporcjonalny do kwadratu prędkości
obrotowej pompy, a wydajność pompy jest proporcjonalna do prędkości.
Moc silnika do
napędu pompy odśrodkowej oblicza się ze wzoru:
gdzie: H – ciśnienie wytwarzane przez pompę, w N/m
2
. Sprawność pomp wysokiego ciśnienia
wynosi 0,6÷0,75, sprawność pomp niskiego ciśnienia 0,2÷0,6. Pompy odśrodkowe napędza
się za pomocą silnika, który może być sprzęgnięty z pompą:
−
bezpośrednio przez sprzęgło podatne,
−
za pomocą przekładni zębatej,
−
za pomocą przekładni pasowej,
−
za pomocą przekładni hydraulicznej, co umożliwia regulację prędkości pompy.
Wydajność pompy można regulować poprzez dławienia przepływu cieczy za pomocą
zaworu na wylocie pompy lub wykorzystując sterowanie prędkości silnika napędowego.
Małe
pompy napędzane za pomocą silnika klatkowego są uruchamiane ręcznie lub automatycznie,
przez bezpośrednie włączenie silnika, do sieci zasilającej, przy większych mocach silników
stosuje się przełączniki gwiazda–trójkąt sterowane ręcznie lub automatycznie oraz układy
sterowania dużych mocy w przypadku dużych pomp. Do napędu pomp, które mają wydajność
regulowaną za pomocą dławienia stosuje się silniki indukcyjne klatkowe przy mniejszych
mocach, lub silniki pierścieniowe przy większych mocach. Do napędu pomp z przekładnią
hydrauliczną stosowane są silniki klatkowe, jak i pierścieniowe.
100
p
m
Q H
P
k
η η
⋅
= ⋅
⋅
[kW]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Napęd wentylatorów. Moment statyczny wentylatora ma przebieg równomierny przy czym
moment i wydajność wentylatora są proporcjonalne do kwadratu prędkości. Zapotrzebowanie
mocy oblicza się ze wzoru:
100
p
m
Q
p
P
k
η η
⋅∆
= ⋅
⋅
[kW]
∆
p – jest różnicą ciśnień między wlotem a wylotem, w N/m
2
. Prędkość wentylatorów wynosi
zazwyczaj 750÷3000 obr/min. Silniki są sprzęgane z wentylatorami bezpośrednio przy
pomocy sprzęgła albo za pośrednictwem przekładni pasowej. Do napędu wentylatorów dużej
mocy, jeśli nie jest wymagana regulacja prędkości, stosuje się silniki synchroniczne lub
indukcyjne klatkowe, napięcie zasilające wynosi zazwyczaj 6000 V. Jeśli napęd wymaga
regulacji prędkości, to stosuje się silniki indukcyjne pierścieniowe, a w przypadkach
wyjątkowych układy napędowe regulowane. Rozruch wentylatorów jest lekki, co wynika
faktu że, w pierwszej fazie rozruchu moment statyczny jest wywołany tylko siłami tarcia
w łożyskach i przekładni. Małe wentylatory są napędzane silnikami klatkowymi.
4.4.2.
Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Co to jest charakterystyka mechaniczna silnika elektrycznego?
2.
Wymień stany pracy silnika elektrycznego?
3.
Czym charakteryzuje się napęd stateczny?
4.
Co to jest moment dynamiczny?
5.
Co się stanie w przypadku gdy moment silnika M jest większy od momentu oporowego
M
m
, (M>M
m
)?
4.4.3.
Ćwiczenia
Ćwiczenie 1
Na podstawie charakterystyki mechanicznej pompy lub wentylatora dobierz moment
silnika elektrycznego do napędu.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
na podstawie otrzymanej charakterystyki maszyny i silnika określić moment dynamiczny,
2)
określić czy silnik i maszyna stanowią napęd stateczny czy niestateczny
3)
sformułować wnioski.
Wyposażenie stanowiska pracy:
−
charakterystyki mechaniczne (wykonane przez producenta),
−
papier milimetrowy na kalce technicznej,
−
przybory do rysowania

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
Ćwiczenie 2
Wykonaj pomiary i narysuj charakterystykę mechaniczną silnika prądu stałego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
na stanowisku pomiarowym, zgodnie z instrukcją do ćwiczenia, wykonać niezbędne
pomiary dla otrzymanego egzemplarza silnika,
2)
na podstawie otrzymanych wyników wykreślić charakterystykę mechaniczną silnika,
3)
sformułować wnioski.
Wyposażenie stanowiska.
−
stanowisko do badania silników elektrycznych,
−
papier milimetrowy na kalce technicznej,
−
przybory do rysowania i pisania,
−
komputer z programem kalkulacyjnym lub programem do opracowywania i graficznego
przedstawiania wyników pomiarów.
4.4.4.
Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
obliczyć moc silnika do napędu pompy tłokowej?
2)
scharakteryzować
charakterystyki
mechaniczne
silnika
elektrycznego?
3)
zdefiniować pojęcie momentu dynamicznego?
4)
dobrać silnik do napędu wentylatora odśrodkowego?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1.
Przeczytaj uważnie instrukcję.
2.
Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3.
Zapoznaj się z zestawem zadań testowych.
4.
Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi.
5.
Do zadań dołączone są 4 możliwości odpowiedzi. Tylko jedna jest prawidłowa.
6.
Udzielaj odpowiedzi na załączonej karcie odpowiedzi, stawiając w odpowiedniej rubryce
znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem, a następnie
ponownie zakreślić odpowiedź prawidłową.
7.
Niektóre zadania wymagają wpisania krótkich odpowiedzi.
8.
Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
9.
Jeśli udzielenie odpowiedzi na niektóre pytania będzie Ci sprawiało trudność, odłóż ich
rozwiązanie na później i wróć do nich, gdy zostanie Ci czas wolny.
10.
Na rozwiązanie testu masz 60 min.
Powodzenia!
ZESTAW ZADAŃ TESTOWYCH
1.
Nurnik to element pompy
a)
odśrodkowej.
b)
zębatej.
c)
tłokowej.
d)
łopatkowej.
2.
Poprawę równomierności tłoczonego strumienia cieczy w pompie tłokowej
jednostronnego działania uzyskujemy poprzez
a)
zmniejszenie przekroju przewodu ssawnego.
b)
zwiększenie obrotów silnika.
c)
zmniejszenie obrotów silnika.
d)
zastosowanie drugiej pompy tłokowej jednostronnego działania w układzie
bliźniaczym.
3.
Wydajność teoretyczna (geometryczna) pompy tłokowej jest to objętość cieczy
a)
w zbiorniku.
b)
wypieranej przez tłok w jednostce czasu.
c)
wypompowana w okresie do pierwszej awarii.
d)
wypompowana w okresie do całkowitego zużycia pompy.
4.
Chłodziarki w sprężarkach tłokowych mają za zadanie chłodzenie
a)
tłoków.
b)
korpusu sprężarki.
c)
powietrza po sprężaniu.
d)
powietrza przed sprężaniem.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
5.
Sprężarki rotacyjne są stosowane w przypadku konieczności uzyskania dużej wydajności
przy ciśnieniu do
a)
~1,6 MPa.
b)
~16 MPa.
c)
~160 MPa.
d)
~10 MPa.
6.
Maszyny powietrzne transformujące energię ciśnienia sprężonego powietrza na pracę
mechaniczną to
a)
sprężarki.
b)
dmuchawy.
c)
silniki.
d)
wentylatory.
7.
Silnik w którym następuje zamiana energii ciśnienia cieczy na mechaniczną energię ruchu
postępowego to
a)
sprężarka.
b)
siłownik.
c)
silnik łopatkowy.
d)
wentylator.
8.
Utrzymywanie stałego ciśnienia cieczy w układzie zapewniają
a)
zawory przelewowe.
b)
zawory bezpieczeństwa.
c)
zawory zwrotne.
d)
rozdzielacze.
9.
Wentylatory lutniowe z napędem elektrycznym przeznaczone są do stosowania
w kopalniach, przy zawartości metanu nie przekraczającej
a)
0,7%.
b)
0,5%.
c)
1%.
d)
2%.
10.
Urządzenie służące do zmiany kierunku przepływającej cieczy w układach hydrauliki
siłowej to
a)
zawór przelewowy.
b)
rozdzielacz suwakowy.
c)
zawór bezpieczeństwa.
d)
filtr.
11.
Charakterystyką mechaniczną silnika elektrycznego nazywa się wykres przedstawiający
zależność
a)
prędkości obrotowej n silnika od mocy.
b)
prędkości obrotowej n silnika od temperatury uzwojeń.
c)
prędkości obrotowej n silnika od rozwijanego przez silnik momentu obrotowego M.
d)
impedancji uzwojeń silnika od rozwijanego przez silnik momentu obrotowego M.
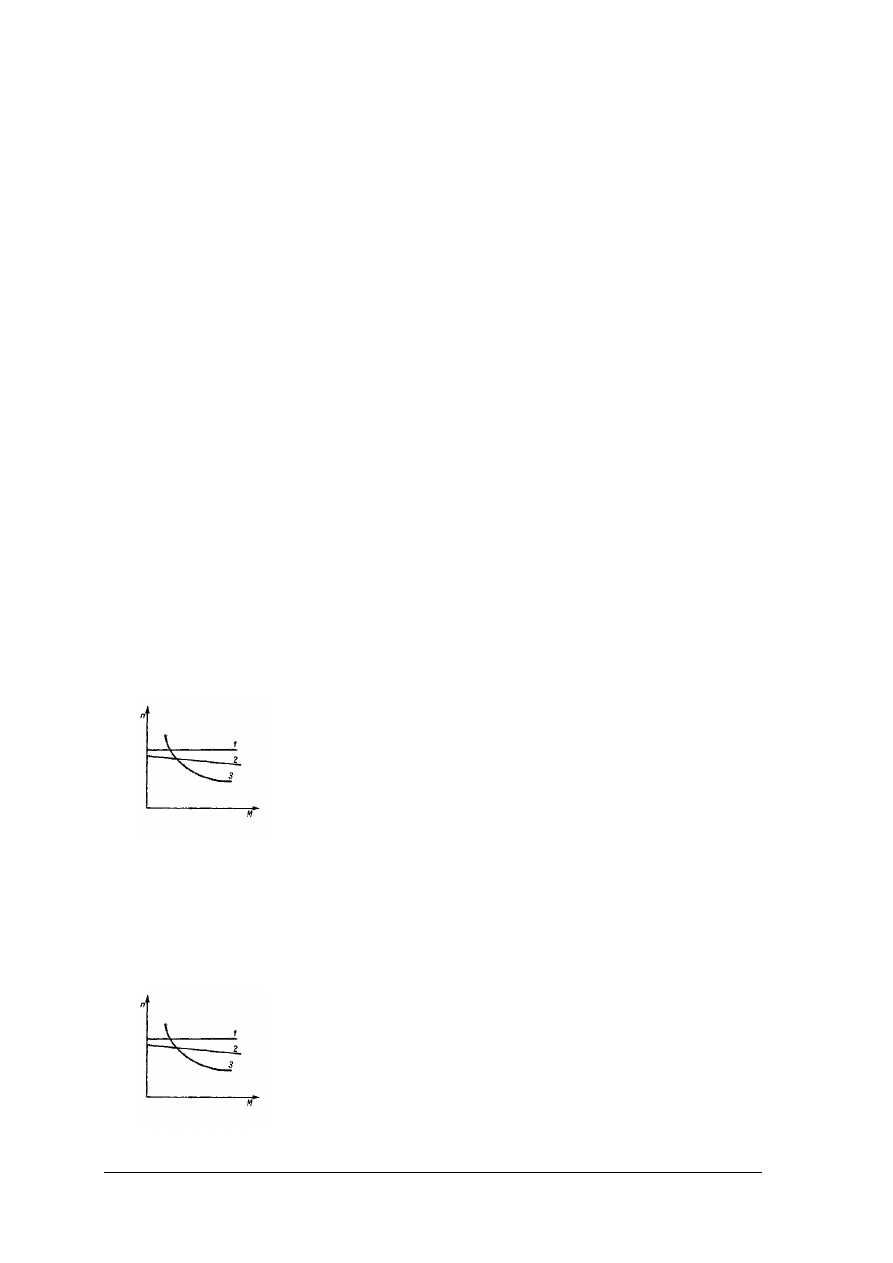
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
12.
Silnik z charakterystyką synchroniczną to taki którego prędkość obrotowa
a)
zależy od obciążenia.
b)
nie zależy od obciążenia.
c)
zależy od obciążenia i temperatury silnika.
d)
zmienia się synchronicznie.
13.
Napęd wytrącony ze stanu ustalonego samoczynnie dążący do przywrócenia zachwianej
równowagi nazywa się
a)
napędem statycznym.
b)
napędem statecznym.
c)
napędem podsterownym.
d)
nadsterownym.
14.
Stan pracy silnikowej charakteryzuje się tym, że
a)
moment obrotowy silnika jest przeciwny do kierunku ruchu, silnik pobiera energię
mechaniczną na wale i oddaje energię elektryczną do sieci zasilającej,
b)
moment obrotowy silnika jest zgodny z kierunkiem ruchu, silnik pobiera energię
elektryczną z sieci i oddaje energię mechaniczną na wale,
c)
moment obrotowy silnika jest przeciwny do kierunku ruchu, silnik pobiera z sieci
energię elektryczną, która zamienia się w nim w ciepło,
d)
silnik pracuje jako przesuwnik fazy.
15.
Wykres 1 na rysunku przedstawia charakterystykę
a)
bocznikową.
b)
synchroniczną.
c)
szeregową
d)
równoległą.
16.
Wykres 2 na rysunku charakterystykę silnika
a)
indukcyjnego trójfazowego.
b)
bocznikowego, prądu stałego.
c)
synchronicznego.
d)
szeregowego, prądu stałego.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
17.
Stan pracy prądnicowej charakteryzuje się tym, że moment obrotowy silnika jest
a)
zgodny z kierunkiem ruchu, silnik pobiera energię elektryczną z sieci i oddaje
energię mechaniczną.
b)
przeciwny do kierunku ruchu, silnik pobiera energię mechaniczną na wale i oddaje
energię elektryczną do sieci zasilającej.
c)
do kierunku ruchu, silnik pobiera energię mechaniczną na wale i energię elektryczną
z sieci zasilającej.
d)
przeciwny do kierunku ruchu, silnik pobiera z sieci energię elektryczną, która
zamienia się w nim w ciepło.
18.
Moment silnika M jest większy od momentu oporowego M
m
to obroty silnika
a)
rosną.
b)
maleją.
c)
nie ulegają zmianie.
d)
silnik zatrzymuje się.
19.
Moment dynamiczny jest równy
a)
różnicy między momentem silnika a momentem mechanicznym napędzanej
maszyny.
b)
sumie momentu silnika i momentu mechanicznego napędzanej maszyny.
c)
ilorazowi momentu silnika i momentu mechanicznego napędzanej maszyny.
d)
iloczynowi momentu silnika i momentu mechanicznego napędzanej maszyny.
20.
Aby rozruch silnika przebiegał płynnie i z jednakowym przyspieszeniem to moment
dynamiczny silnika w okresie rozruchu
a)
powinien się zmieniać się takt częstotliwości sieci.
b)
powinien mieć możliwie stałą wartość.
c)
powinien maleć.
d)
to nie ma znaczenia.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
KARTA ODPOWIEDZI
Imię i nazwisko................................................................................................
Użytkowanie maszyn i urządzeń do zabezpieczania wyrobisk
Zakreśl poprawną odpowiedź
Nr
zadania
Odpowiedź
Punkty
1.
a
b
c
d
2.
a
b
c
d
3.
a
b
c
d
4.
a
b
c
d
5.
a
b
c
d
6.
a
b
c
d
7.
a
b
c
d
8.
a
b
c
d
9.
a
b
c
d
10.
a
b
c
d
11.
a
b
c
d
12.
a
b
c
d
13.
a
b
c
d
14.
a
b
c
d
15.
a
b
c
d
16.
a
b
c
d
17.
a
b
c
d
18.
a
b
c
d
19.
a
b
c
d
20.
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
6. LITERATURA
1.
Antoniak J., Opolski T.: Maszyny górnicze cz. 2. Śląsk, Katowice 1997
2.
Korecki Z.,: Maszyny i urządzenia górnicze cz1. Śląsk, Katowice 1976
3.
Mastaliński M., Siwek W. Elektrotechnika, elektronika i automatyka w górnictwie cz. 2.
Ś
ląsk, Katowice 1987
4.
Orlik Z. Maszynoznawstwo. Wydawnictwa Szkolne i Pedagogiczne, Warszawa 1985
5.
Poradnik górnika. Śląsk, Katowice 1978
6.
Schmid D., inni: Mechatronika REA, Warszawa 2002
7.
Urbanowicz H.: Napęd elektryczny. WNT, Warszawa 1977
Wyszukiwarka
Podobne podstrony:
03 Uzytkowanie maszyn i urzadze Nieznany (2)
04 Uzytkowanie maszyn i urzadze Nieznany (3)
05 Uzytkowanie maszyn i urzadze Nieznany (3)
07 Uzytkowanie maszyn i urzadze Nieznany
09 Uzytkowanie maszyn i urzadze Nieznany (2)
03 Uzytkowanie maszyn i urzadze Nieznany (3)
13 Użytkowanie maszyn i urządzeń do zabezpieczania 2
13 Użytkowanie maszyn i urządzeń do zabezpieczania
Eksploatowanie maszyn i urzadze Nieznany
12 Użytkowanie maszyn i urządzeń oraz obiektów
31 Dobieranie maszyn i urzadzen Nieznany
12 Użytkowanie maszyn i urządzeń oraz obiektów
13-obsługa maszyn i urządzeń, Instrukcje BHP, XVI - OBRÓBKA
Wykład VI Użytkowanie maszyn i urządzeń ED
04 Stosowanie maszyn i urzadzen Nieznany
16 Uzytkowanie sieci i urzadzen Nieznany (2)
08 Użytkowanie maszyn i urządzeń do wytwarzania i obróbki
więcej podobnych podstron