Iloczyn skalarny dwóch wektorów jest iloczynem bezwzględnym jednego wektora przez wartośd
bezwzględną składowej drugiego wektora w kierunku pierwszego tzn.
- kąt pomiędzy
Iloczynem wektorowym dwóch wektorów a i b czyli a x b jest trzeci wektor c
kierunek wektora c jest prostopadły do płaszczyzny wyznaczonej przez a i b, jego zwrot wyznacza
reguła śruby prawoskrętnej
Moment siły - Jeżeli siła F działa na cząstkę w punkcie P odległym o r względem pewnego punktu
odniesienia 0, to moment siły M względem początku układu definiujemy jako
r – wektor wodzący punktu przyłożenia działającej siły,
określa położenie cząstki wzgl. wybranego
inercjalnego układu odniesienia (lub ramię siły)
M – moment siły względem pkt. 0.,
θ – kąt między r i F,
Zasada zachowania pędu:
Suma zewnętrznych momentów sił działających na układ cząstek jest równa zeru
Twierdzenie Steinera - Moment bezwładności (I) względem dowolnej osi równa się momentowi
bezwładności I
0
względem osi przechodzącej przez środek masy ciała (i równoległej do danej osi),
zwiększonemu o iloczyn masy całkowitej (m) ciała przez kwadrat odległości (d) środka mas ciała od
danej osi
Prawa Keplera
1.Wszystkie planety poruszają się po orbitach eliptycznych, w których w jednym z ognisk znajduje się
Słooce – prawo orbit
2.
Odcinek łączący jakąkolwiek planetę ze Słoocem zakreśla w równych odstępach czasu równe pola
– prawo pól.
3.Kwadrat okresu obiegu dowolnej planety jest proporcjonalny do sześcianu średniej odległości
planety od Słooca – prawo okresów.
Prawo powszechnego ciążenia
Dwa punkty materialne o masach M i m oddziałują na siebie (przyciągają się) wzajemnie siłą F:
Natężenie pola grawitacyjnego w danym punkcie jest określone ilorazem siły F, jaka działa na
dowolny punkt materialny o masie m, przez jego masę.
Dla r > R pole (na zewnątrz kuli) jest równe:
tj. tak jakby cała masa była skupiona w środku kuli.
Dla r < R pole (wewnątrz kuli) w punkcie P pole pochodzące od zewnętrznej warstwy jest zerem.
Pole E’ pochodzi więc tylko od kuli o promieniu r (i masie m) czyli
y
y
x
x
b
a
b
a
b
a
b
a
cos
b
a
,
sin
ab
c
b
a
c
a
b
b
a
F
r
M
sin
rF
M
F
r
M
czyli
dt
v
m
d
r
M
dt
v
m
d
r
F
r
r
dt
v
m
d
dt
p
d
F
)
(
,
)
(
,
)
(
const
L
i
dt
L
d
wtedy
M
zew
0
0
2
0
md
I
I
2
r
Mm
G
F
r
r
Mm
G
F
3
2
2
F
;
r
M
G
g
r
Mm
G
m
F
g
2
r
M
G
E
r
R
M
G
'
E
3
Potencjał pola grawitacyjnego w danym punkcie opisuje pole pod względem energetycznym (jedn.
(J/kg) i zdefiniowany jest jako
tj. potencjał pola grawitacyjnego V w punkcie r - stosunek grawitacyjnej energii potencjalnej masy m
do wartości tej masy, znajdującej się w punkcie r.
Równanie ruchu oscylatora harmonicznego prostego
Znajdujemy rozwiązanie równania ruchu dla oscylatora:
Rozwiązanie równania oscylatora
harmonicznego prostego
Prawo Coulomba
0
= 8,854·10
-12
C
2
/(Nm
2
) - przenikalnośd elektryczna próżni (stała dielektryczna próżni).
Dipol elektryczny składa się z dwóch ładunków Q oddalonych od siebie o l.
p = Ql - moment dipolowy.
Natężenie pola elektrycznego definiujemy jako siłę działającą na ładunek próbny q (umieszczony w
danym punkcie przestrzeni) podzieloną przez ten ładunek.
Prawo Gaussa - Strumieo pola wychodzący z naładowanego ciała jest równy wypadkowemu
ładunkowi podzielonemu przez
0
.
Trzy wektory elektryczne
D - INDUKCJI
E - NATĘŻENIA POLA
P - POLARYZACJI
D =
0
E + P
D - ładunek swobodny
0
E - wszystkie ładunki
P - ładunek polaryzacyjny
Zasady dynamiki Newtona
1. Ciało pozostaje w stanie spoczynku lub porusza się ze stałą prędkością (v = const, a = 0), gdy
działa na nie siła wypadkowa równa zeru.
2. Ciało, na które działają stałe siły, porusza się ruchem jednostajnie przyspieszonym z
przyspieszeniem a, którego wartośd i kierunek są określone stosunkiem siły wypadkowej F do
masy ciała m.
)
(
dla
r
1
GM
m
r
1
GmM
V
m
)
r
(
E
)
r
(
V
p
0
2
2
kx
dt
x
d
m
x
m
k
dt
x
d
kx
dt
x
d
m
2
2
2
2
0
)
cos(
)
sin(
)
cos(
2
2
2
t
A
dt
x
d
a
t
A
dt
dx
v
t
A
x
)
cos(
t
A
x
2
2
1
r
q
q
k
F
0
4
1
k
rˆ
r
q
q
k
F
3
2
1
3
r
p
qk
F
q
F
E
0
.
.
4
d
wewn
wewn
Q
kQ
S
E
+ + + + + + + + + + +
- - - - - - - - - - -
- - - - - - - - - - -
+ + + + + + + + + + +
D
0
E
P
dt
p
d
dt
v
m
d
a
m
F
czyli
m
F
a
wyp
wyp
)
(

3. Siły są zawsze wynikiem oddziaływania dwóch ciał. Dwa ciała działają na siebie siłami równymi
co do wartości i przeciwnymi co do zwrotu.
Siła- Miarą oddziaływania między ciałami jest wielkośd wektorowa zwana siłą :
jedn. (N = kgm/s
2
)
Zasada zachowania pędu
Prawo zachowania pędu - jeżeli wypadkowa sił zewnętrznych działających na układ wynosi zero
(F
zew
= 0), wtedy całkowity pęd układu pozostaje stały
całkowity pęd układu odosobnionego jest wielkością stałą w każdym czasie.
Prawo Faradaya
Zjawisko indukcji elektromagnetycznej - powstawanie prądów elektrycznych w zamkniętym
obwodzie, podczas przemieszczania się względem siebie źródła pola magnetycznego i zamkniętego
obwodu
Reguła Lenza -Prąd indukowany ma taki kierunek, że przeciwstawia się zmianie, która go wywołała.
Oscylator harmoniczny
RÓWNANIA MAXWELL’A
Wektor Poyntinga - Jedną z ważnych właściwości fali elektromagnetycznej jest zdolnośd do
przenoszenia energii od punktu do punktu.
Szybkośd przepływu energii przez jednostkową powierzchnię płaskiej fali elektromagnetycznej można
opisad wektorem S zwanym wektorem Poyntinga.
a
m
F
B
A
F
F
const
P
wtedy
dt
P
d
dt
v
m
d
dt
v
d
m
a
m
F
zew
0
)
(
t
B
d
d
kx
t
x
m
2
2
d
d
Prawo
Równanie
Czego dotyczy
Doświadczenie
1
Gaussa dla
elektryczno-
ści
0
/
d
q
S
E
ładunek i pole
elektryczne
Przyciąganie, odpychanie
ładunków (1/
r
2
).
Ładunki gromadzą się na
powierzchni metalu
2
Gaussa dla
magnetyzmu
0
dS
B
pole magnetyczne nie stwierdzono istnienia
monopola magnetycznego
3
indukcji
Faradaya
t
B
d
d
d
l
E
efekt elektryczny
zmieniającego się
pola magnetycz-
nego
indukowanie SEM w obwo-
dzie przez przesuwany ma-
gnes
4
Ampera
(rozszerzone
przez
Maxwella)
t
E
d
d
d
0
0
l
B
I
0
0
0
1
c
efekt magnetycz-
ny zmieniającego
się pola elek-
trycznego
prąd w przewodniku wytwa-
rza wokół pole magnetyczne
prędkość światła można wyli-
czyć z pomiarów EM
B
E
S
0
1
prawo odbicia i załamania:
promieo odbity i załamany leżą w jednej płaszczyźnie utworzonej przez promieo padający i
prostopadłą do powierzchni odbijającej w punkcie padania (normalna padania) tzn. w płaszczyźnie
rysunku.
Zasada Fermata - Promieo świetlny biegnący z jednego punktu do drugiego przebywa drogę, na
której przebycie trzeba zużyd w porównaniu z innymi, sąsiednimi drogami, minimum (albo
maksimum) czasu.
Zjawiska tłumaczące falową naturę światła
-
rozszczepianie światła białego w pryzmacie(powstawanie widma światła)
-dyfrakcja (ugięcie kierunku rozchodzenia się światła) na krawędziach i otworach
Jednostka przenikalności magnetycznej próżni
Moment pędu to iloczyn wektorowy dwóch wektorów. Wektora położenia i wektora pędu. Oznacza to tyle, że wartośd
momentu pędu jest to iloczyn wartosci wspomnianych wektorów i sinusa kąta między nimi. Wektor momentu pędu jest
prostopadły do płaszczyzny, na której leżą wektor położenia i pędu (czyli predkości). Zwrot określamy reguła sruby
prawoskręnej chyba. Dla bryły szatywnej moment pędu to iloczyn prękośdi kątowej i momentu bezwładności bryły
.
Moment siły (moment obrotowy) siły F względem punktu O jest to iloczyn wektorowy promienia wodzącego r, o początku
w punkcie O i koocu w punkcie przyłożenia siły, oraz siły F:
Wektor momentu siły jest wektorem osiowym (pseudowektorem), zaczepiony jest w punkcie O, a jego kierunek
jest prostopadły do kierunku płaszczyzny wyznaczonej przez wektor F i promieo wodzący r.
Moment bezwładności ciała zależy od wyboru osi obrotu, od kształtu ciała i od rozmieszczenia masy w ciele. Moment
bezwładności ma wymiar
. Zwykle mierzy się go w kg*m². Moment bezwładności punktu materialnego jest iloczynem
jego masy i kwadratu odległości od osi obrotu:
gdzie: – masa punktu; – odległość punktu od osi obrotu.
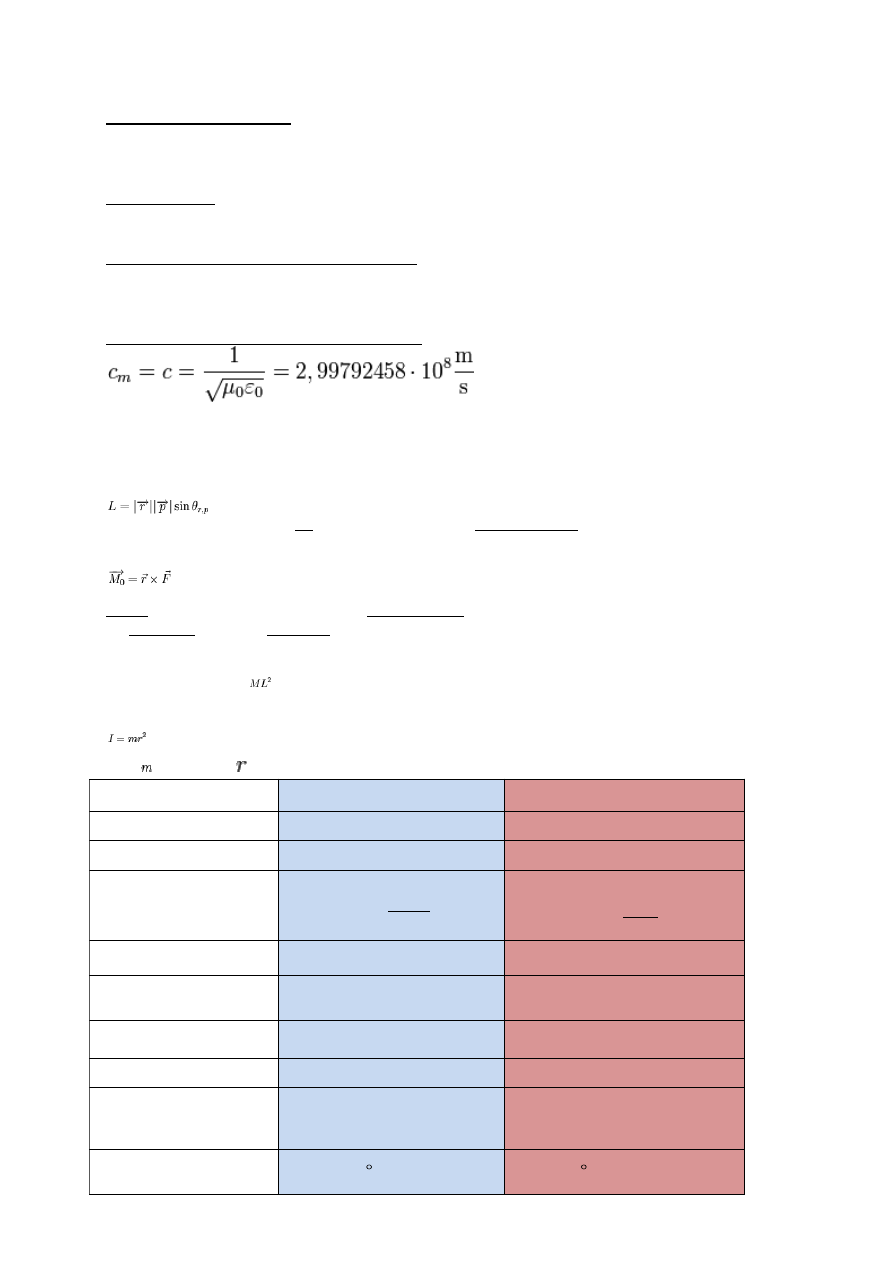
Pole grawitacyjne g
Pole elektryczne E
1. źródło pola
Masa m>0
Ładunek q>0, q<0
2. stosowalność
Obowiązuje, gdy v<<c
Obowiązuje zawsze
3. siła
Newtonowska
r
r
m
m
G
F
3
2
1
Coulomba
r
r
q
q
k
F
3
2
1
4. natężenie pola
r
r
Gm
m
F
g
)
/
(
/
2
r
r
kq
q
F
E
)
/
(
/
2
5. energia
potencjalna
r
m
Gm
U
g
/
2
1
r
q
kq
U
E
/
2
1
6. potencjał pola
r
Gm
m
U
V
g
g
/
/
r
d
E
r
kq
q
U
V
E
E
/
/
7. praca
W
g
= U
g
= mV
g
W
E
= U
E
= qV
E
8. połączenie pola
skalarnego i
wektorowego
)
,
,
(
z
y
x
gradV
g
)
,
,
(
z
y
x
gradV
E
9. pole
zachowawcze
Gdy
0
r
d
F
g
0
r
d
F
E
Wyszukiwarka
Podobne podstrony:
fizyka popr
I kol.popr.wykł, Politechnika Gdańska ETI Informatyka Niestacjonarne, Sem I, Fizyka, Pomoce
fizyka 40 spr popr, Lepkość
!Polityka antymonopolowa w Polsce ref popr, PWr, Fizyka, struktury
cw 13 - Lepkosc - popr, AGH, i, Laborki, Laborki, Lab, FIZYKA - Laboratorium, Struna i Krzychu
fizyka budowli moje popr
FIZYKAA
Fizyka 0 wyklad organizacyjny Informatyka Wrzesien 30 2012
7 Pielegniarstwo popr
Badania fizykalne kostno stawowo mięśniowy
Relacja lekarz pacjent w perspektywie socjologii medycyny popr
Badanie fizykalne kości, mięśni i stawów
Sieci komputerowe fizyka informatyka
Badanie fizykalne1
Fizyka j c4 85drowa
Badanie fizykalne 3
Wyk ad Fizyka 2
więcej podobnych podstron