http://www.iil.pwr.wroc.pl/zukowski
1
WZORY DO WYZNACZANIA PRZEMIESZCZEŃ OD OBCIĄZEŃ SIŁAMI
W celu wyznaczenia przemieszczenia należy dany układ rozwiązać od 2 obciążeń:
1. Od obciążenia stanowiącego przyczynę wywołującą szukane przemieszczenie,
2. Od obciążenia "jednostkowego" przyłożonego w miejscu i kierunku szukanego przemieszczenia.
Uwaga: Jedno z tych rozwiązań może być wirtualne co oznacza, że może ono być wykonane dla
dowolnego izostatycznego modelu układu (we wzorach oznaczono je nadkreśleniem).
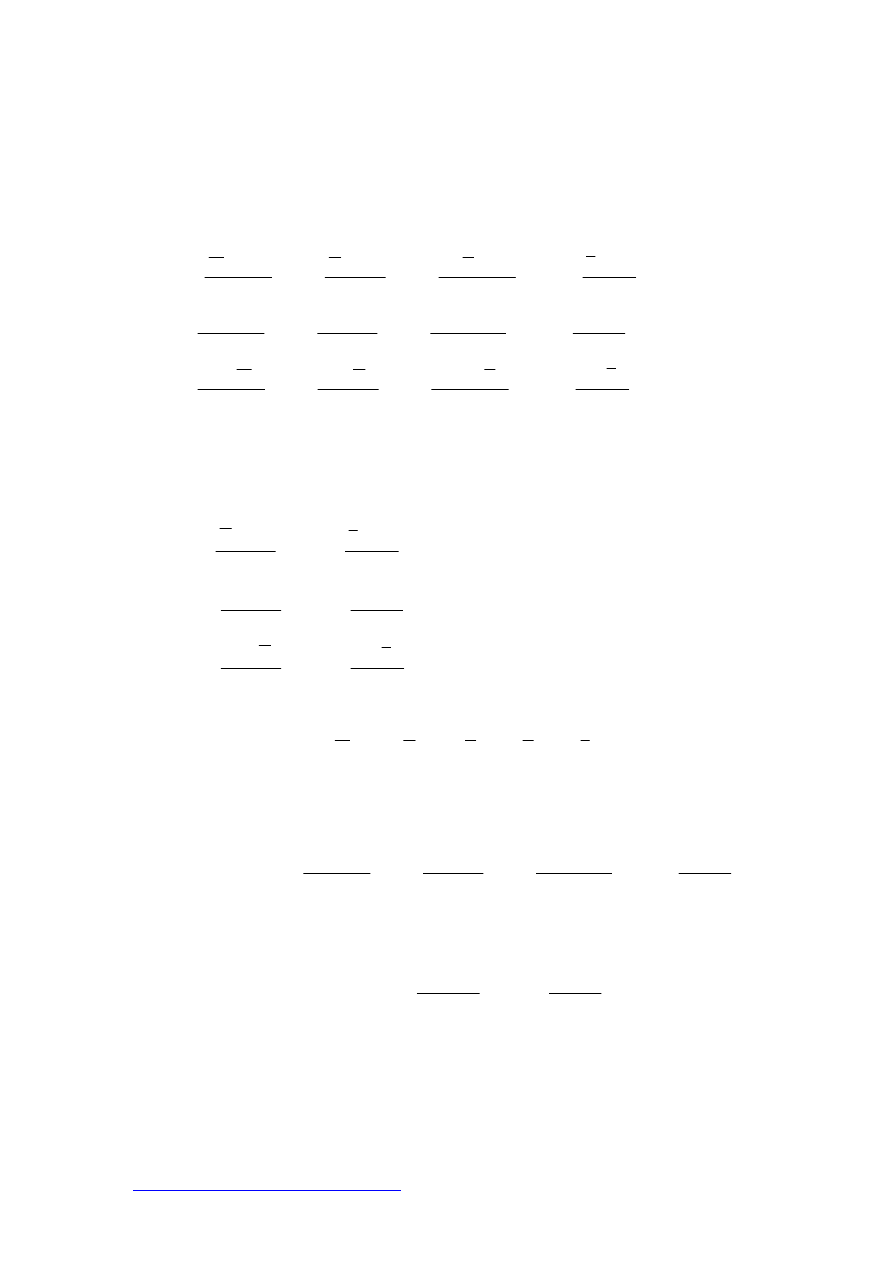
DLA BELEK I RAM
.
∫
∑
∫
∫
∫
∑
∫
∫
∫
∑
∫
∫
⋅
+
⋅
⋅
⋅
+
⋅
⋅
+
⋅
⋅
=
=
⋅
+
⋅
⋅
⋅
+
⋅
⋅
+
⋅
⋅
=
=
⋅
+
⋅
⋅
⋅
+
⋅
⋅
+
⋅
⋅
=
∆
=
∆
s
s
F
s
i
s
F
i
F
i
F
i
s
s
F
s
i
s
F
i
F
i
F
i
s
s
F
s
i
s
F
i
F
i
F
i
F
i
iF
k
S
S
dx
GA
V
V
dx
EA
N
N
dx
EI
M
M
k
S
S
dx
GA
V
V
dx
EA
N
N
dx
EI
M
M
k
S
S
dx
GA
V
V
dx
EA
N
N
dx
EI
M
M
κ
κ
κ
Uwaga
: Człony drugi i trzeci w każdej wersji wzoru są z reguły pomijalnie małe w stosunku do
członów pierwszego i czwartego. Jedynie dla belek o dużej wysokości, w stosunku do rozpiętości
(h/L > 0.1), wpływ członu trzeciego może być istotny.
DLA KRATOWNIC
=
⋅
+
⋅
⋅
=
∆
=
∆
∑
∑
s
s
F
s
i
s
p
p
p
p
i
p
i
p
F
i
iF
k
S
S
L
A
E
N
N
=
⋅
+
⋅
⋅
=
∑
∑
s
s
F
s
i
s
p
p
p
p
i
p
i
p
k
S
S
L
A
E
N
N
∑
∑
⋅
+
⋅
⋅
=
s
s
F
s
i
s
p
p
p
p
i
p
i
p
k
S
S
L
A
E
N
N
W układach izostatycznych
rozwiązania rzeczywiste są identyczne z wirtualnymi:
.
,
,
,
,
S
S
R
R
V
V
N
N
M
M
=
=
=
=
=
Stąd
DLA BELEK I RAM IZOSTATYCZNYCH
∫
∑
∫
∫
⋅
+
⋅
⋅
⋅
+
⋅
⋅
+
⋅
⋅
=
∆
=
∆
,
s
F
s
i
s
F
i
F
i
F
i
F
i
iF
k
S
S
dx
GA
V
V
dx
EA
N
N
dx
EI
M
M
κ
DLA KRATOWNIC IZOSTATYCZNYCH
,
∑
∑
⋅
+
⋅
⋅
=
∆
s
s
F
s
i
s
p
p
p
p
F
p
i
p
iF
k
S
S
L
A
E
N
N

http://www.iil.pwr.wroc.pl/zukowski
2
PRZYJĘTE OZNACZENIA
Oznaczenie
wielkości składa się z symbolu oznaczającego tę wielkość i indeksów dolnych oraz
górnych.
SYMBOLE oznaczające określone wielkości:
∆
- przemieszczenie (może to być przesunięcie, kąt obrotu lub dowolna suma przemieszczeń a w tym
wzajemne przemieszczenie) lub przyrost określonej wielkości
M=M(x) – moment zginający,
N=N(x) – siła osiowa (podłużna),
V=V(x) – siła tnąca
(poprzeczna),
S – siła w więzi sprężystej (moment w więzi rotacyjnej lub siła podłużna w więzi translacyjnej),
k – sztywność więzi sprężystej,
∫
⋅
⋅
=
A
dA
b
S
I
A
2
2
2
κ
- współczynnik zależny od kształtu przekroju (dla dwuteowników
w
A
A
≅
κ
),
E – moduł sprężystości podłużnej materiału (Younga),
(
)
ν
+
⋅
=
1
2
E
G
– moduł sprężystości poprzecznej materiału (Kirchoffa),
ν
- współczynnik Poissona,
A, I – pole i moment bezwładności poprzecznego przekroju pręta,
b – szerokość przekroju w miejscu ścinania
S – moment statyczny „odciętej” części przekroju,
w
A - pole przekroju środnika.
INDEKSY
Indeks górny
określa przyczynę wywołującą daną wielkość.
Pierwszy indeks dolny
określa miejsce działania (występowania) danej wielkości.
Drugi indeks dolny
określa, jeśli nie ma indeksu górnego, przyczynę wywołującą daną wielkość,
a jeśli jest indeks górny, stanowi uzupełnienie określenia miejsca działania danej wielkości.
Np.:
n
M
oznacza moment w dowolnym miejscu wywołany przyczyną oznaczoną symbolem n,
n
ij
M oznacza moment w punkcie i pręta i-j wywołany przyczyną oznaczoną symbolem n,
j
i
ij
∆
∆ , oznaczają przemieszczenie w miejscu i kierunku i wywołane przyczyną oznaczoną
symbolem j
i
p
N oznacza siłę osiową w pręcie o numerze p wywołaną przyczyną oznaczoną symbolem i,
i
s
S oznacza siłę w więzi sprężystej o numerze s wywołaną przyczyną oznaczoną symbolem i.
Wyszukiwarka
Podobne podstrony:
Mechanika Plynow Lab, Sitka Pro Nieznany
mechanika budowli II analiza ki Nieznany
9a Napiecia dotykowe wzory ozna Nieznany (2)
mechanika do poprawki id 290847 Nieznany
Mechanika plynow PYTANIA id 291 Nieznany
mechanika 1 sem pk wil przestrz Nieznany
mechanika budowli nr1 id 290806 Nieznany
Wyzn-przem-rama1
Mechanika Plynow Teoria id 2912 Nieznany
Mechanika gruntow W 02 id 29095 Nieznany
Wyzn-przem-rama2
Mechanika gruntow W 09 id 29096 Nieznany
modele prognozowania wzory wyja Nieznany
mechanika plynow sciaga id 2912 Nieznany
mechanika egzamin teoria id 290 Nieznany
POLACZENIA SPAWANE [wzory] id 3 Nieznany
Mechanika Plynow Lab, Sitka Pro Nieznany
więcej podobnych podstron