UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
1
ZADANIA - Seria 2, Grupy, ciała, przestrzenie liniowe, przekształcenia liniowe
1. Wykazać, że grupy przekształceń symetrii prostokąta, rombu oraz równoległoboku są podgrupami
grupy przekształceń symetrii kwadratu. Sporządzić tabelki mnożenia dla wszystkich grup.
Sprawdzić twierdzenie Lagrange’a o rzędzie grup skończonych.
Działaniem ( mnożeniem ) w grupie przekształceń jest złożenie ( superpozycja ) przekształceń.
2. Ustalić izomorfizm pomiędzy grupami przekształceń symetrii kwadratu, prostokąta, rombu oraz
równoległoboku a odpowiednimi podgrupami grupy permutacji zbioru czteroelementowego
( wierzchołki czworoboku ).
Działaniem w grupie przekształceń jest złożeniem przekształceń..
3. Dla jakich grup
G
odwzorowanie
G
G
f
:
postaci:
a)
2
)
(
x
x
f
b)
1
)
(
x
x
f
jest homomorfizmem? Kiedy te odwzorowania są izomorfizmami?
4. Wykazać, że odwzorowanie
2
1
:
G
G
f
jest homomorfizmem grup dla ustalonego
R
a
:
a)
)
,
(
1
R
G
,
)
,
(
2
R
G
;
a
x
x
f
)
(
b)
)
,
(
1
R
G
,
)
,
(
2
R
G
;
x
a
x
f
ln
)
(
c)
)
,
(
1
R
G
,
)
,
(
2
R
G
;
ax
e
x
f
)
(
Czy odwzorowania te są izomorfizmami?
5. Niech
)
( m
Q
oznacza podciało ciała liczb rzeczywistych
R
, złożone z liczb postaci
m
b
a
,
gdzie
,
,
Q
b
a
,
N
m
Q
m
.Wykazać, że ciała
)
( m
Q
i
)
( n
Q
są izomorficzne gdy
2
k
n
m
dla pewnego
Q
k
.
6. Rozwiązać następujące równania:
a)
0
7
2
2
x
x
w ciele
)
2
(
Q
,
b)
5
2
x
w ciele
11
Z
.
7. Wykazać, że jeśli
x
jest rozwiązaniem równania
a
x
n
w ciele
p
Z
, to
p
x
jest
również rozwiązaniem tego równania.
8. W zbiorach wielomianów stopnia n o współczynnikach:
a) rzeczywistych -
]
[
n
R
, b) wymiernych -
]
[
n
Q
, c) całkowitych -
]
[
n
Z
określone jest dodawanie wielomianów oraz mnożenie przez liczbę ( odpowiednio:
rzeczywistą, wymierną lub całkowitą ). Czy zbiory te są przestrzeniami liniowymi? Czy
]
[
n
Q
jest
podprzestrzenią liniową przestrzeni
]
[
n
R
? Czy przestrzenie liniowe
]
[
n
R
i
]
[
n
Q
są
homomorficzne? Rozważyć najpierw przypadek
0
n
.
9. Czy przekształcenie ( mnożenie przez wielomian )
]
[
]
[
s
n
n
R
gf
f
R
, dla ustalonego
]
[
s
R
g
, jest przekształceniem liniowym?
UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
2
ZADANIA - Seria 2 - Uwagi, szkice rozwiązań
1. Jeśli figura geometryczna posiada oś symetrii to odbicie względem tej osi jest przekształceniem
symetrii. Jeśli figura geometryczna posiada środek symetrii to obroty wokół tego punktu
( o odpowiedni kąt ) są przekształceniami symetrii.
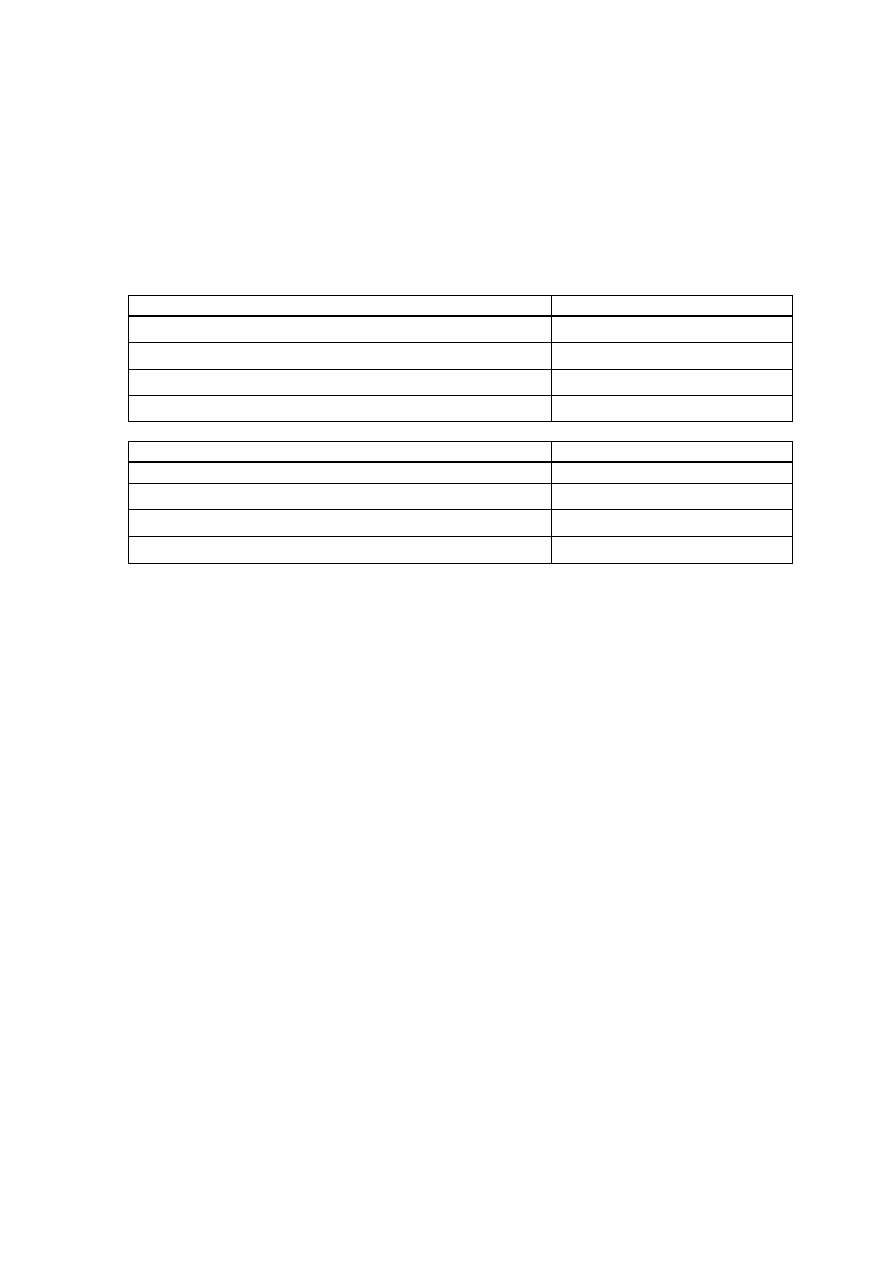
Kwadrat ABCD
Oś symetrii
Przekształcenie symetrii - symbol
Prosta równoległa do podstawy AB dzieląca boki na połowy
Odbicie -
1
P
Prosta równoległa do boku AD dzieląca podstawy na połowy Odbicie -
2
P
Przekątna AC
Odbicie -
1
T
Przekątna BD
Odbicie -
2
T
Środek symetrii
Przekształcenie symetrii - symbol
Punkt przecięcia przekątnych
Obrót o kąt 0
O
-
I
Punkt przecięcia przekątnych
Obrót o kąt 90
O
-
1
O
Punkt przecięcia przekątnych
Obrót o kąt 180
O
-
2
O
Punkt przecięcia przekątnych
Obrót o kąt 270
O
-
3
O
Grupa symetrii kwadratu składa się z 8 przekształceń. Działaniem ( mnożeniem ) w grupie jest
złożenie ( superpozycja ) przekształceń. Aby sporządzić tabelkę mnożenia w grupie wygodnie jest
przyjąć oznaczenia punktów płaszczyzny, w których znajdują się wierzchołki kwadratu, jako A, B,
C, D natomiast wierzchołki ponumerować odpowiednio 1, 2, 3, 4 i obserwować, w którym z
kolejnych punktów A, B, C, D pojawią się one po każdym przekształceniu.
)
,
,
,
(
)
,
,
,
(
:
D
C
B
A
D
C
B
A
I
)
,
,
,
(
)
,
,
,
(
:
1
A
B
C
D
D
C
B
A
P
)
,
,
,
(
)
,
,
,
(
:
1
C
B
A
D
D
C
B
A
O
)
,
,
,
(
)
,
,
,
(
:
2
C
D
A
B
D
C
B
A
P
)
,
,
,
(
)
,
,
,
(
:
2
B
A
D
C
D
C
B
A
O
)
,
,
,
(
)
,
,
,
(
:
1
B
C
D
A
D
C
B
A
T
)
,
,
,
(
)
,
,
,
(
:
3
A
D
C
B
D
C
B
A
O
)
,
,
,
(
)
,
,
,
(
:
2
D
A
B
C
D
C
B
A
T
Przykłady mnożenia (składanie przekształceń) w grupie:
)
,
,
,
(
)
,
,
,
(
)
,
,
,
(
:
1
2
2
1
D
A
B
C
T
B
A
D
C
O
D
C
B
A
O
T
czyli
2
2
1
T
O
T
bowiem:
Wierzchołek 1 znajdujący się początkowo w punkcie
A
znajdzie się po obrocie
2
O
w punkcie
C
, a punkt
C
przy odbiciu
1
T
nie zmienia swego położenia. Ostatecznie
C
A
.
Wierzchołek 2 znajdujący się początkowo w punkcie
B
znajdzie się po obrocie
2
O
w punkcie
D
, a punkt
D
przy odbiciu
1
T
przechodzi na punkt
B
. Ostatecznie
B
B
.
Tak się dzieje tylko przy odbiciu
2
T
.
UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
3
ZADANIA - Seria 2 - Uwagi, szkice rozwiązań - cd
)
,
,
,
(
)
,
,
,
(
)
,
,
,
(
:
1
2
2
1
D
A
B
C
O
C
D
A
B
P
D
C
B
A
P
O
czyli
2
2
1
T
P
O
bowiem:
Wierzchołek 1 znajdujący się początkowo w punkcie
A
znajdzie się po odbiciu
2
P
w punkcie
B
, a punkt
B
przy obrocie
1
O
przechodzi na punkt
C
. Ostatecznie
C
A
.
Wierzchołek 2 znajdujący się początkowo w punkcie
B
znajdzie się po odbiciu
2
P
w punkcie
A
, a punkt
A
przy obrocie
1
O
przechodzi na punkt
B
. Ostatecznie
B
B
.
Tak się dzieje tylko przy odbiciu
2
T
.
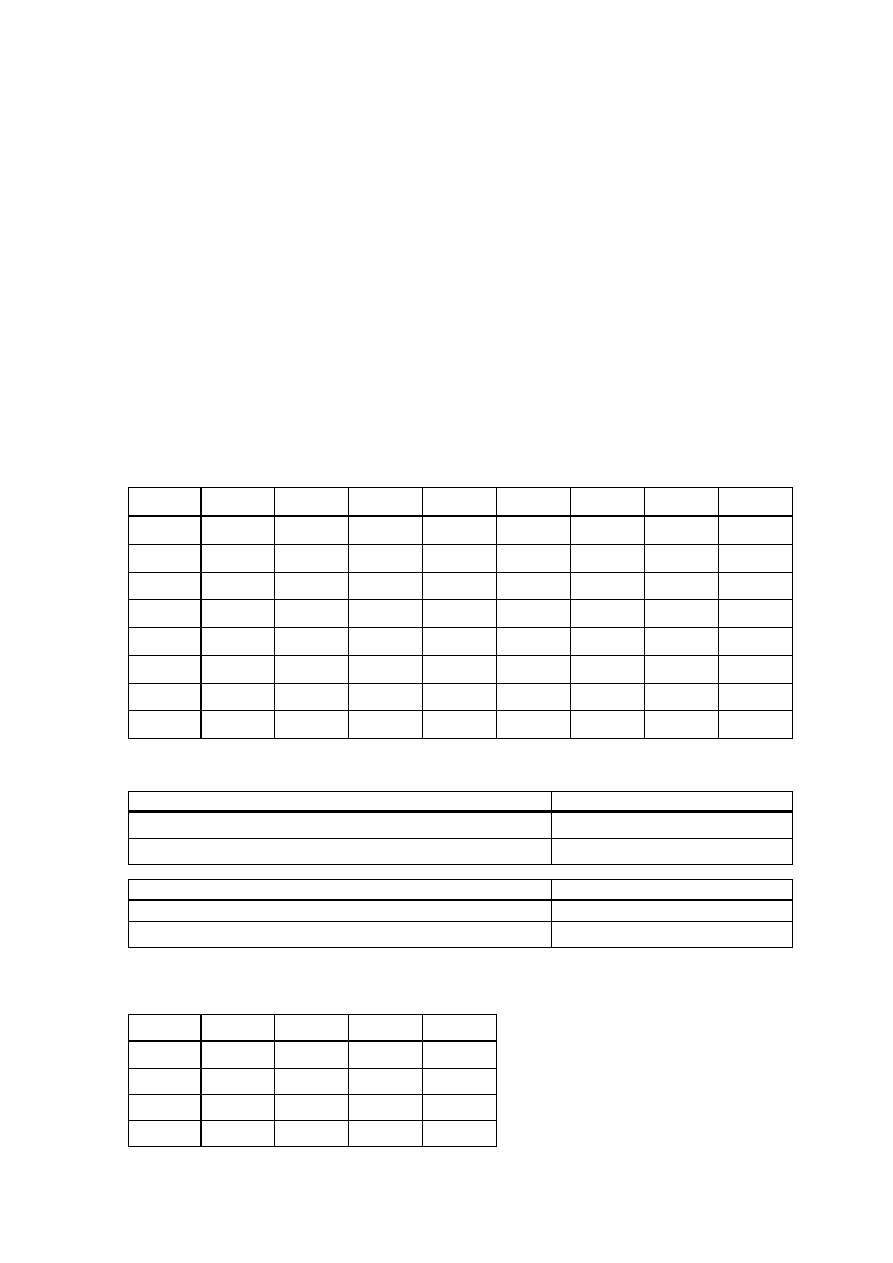
Postępując podobnie oraz korzystając z faktu, że w tabelce mnożenia grupy skończonej, w
każdym wierszu i w każdej kolumnie elementy grupy występują tylko raz, otrzymujemy
następującą tabelkę mnożenia dla grupy symetrii kwadratu:
I
1
O
2
O
3
O
1
P
2
P
1
T
2
T
I
I
1
O
2
O
3
O
1
P
2
P
1
T
2
T
1
O
1
O
2
O
3
O
I
1
T
2
T
2
P
1
P
2
O
2
O
3
O
I
1
O
2
P
1
P
2
T
1
T
3
O
3
O
I
1
O
2
O
2
T
1
T
1
P
2
P
1
P
1
P
2
T
2
P
1
T
I
2
O
3
O
1
O
2
P
2
P
1
T
1
P
2
T
2
O
I
1
O
3
O
1
T
1
T
1
P
2
T
2
P
1
O
3
O
I
2
O
2
T
2
T
2
P
1
T
1
P
3
O
1
O
2
O
I
Romb ABCD
Oś symetrii
Przekształcenie symetrii - symbol
Przekątna AC
Odbicie -
1
T
Przekątna BD
Odbicie -
2
T
Środek symetrii
Przekształcenie symetrii - symbol
Punkt przecięcia przekątnych
Obrót o kąt 0
O
-
I
Punkt przecięcia przekątnych
Obrót o kąt 180
O
-
2
O
Czteroelementowa grupa symetrii rombu jest podgrupą symetrii kwadratu, z następującą tabelką
mnożenia:
I
2
O
1
T
2
T
I
I
2
O
1
T
2
T
2
O
2
O
I
2
T
1
T
1
T
1
T
2
T
I
2
O
2
T
2
T
1
T
2
O
I
UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
4
ZADANIA - Seria 2 - Uwagi, szkice rozwiązań - cd
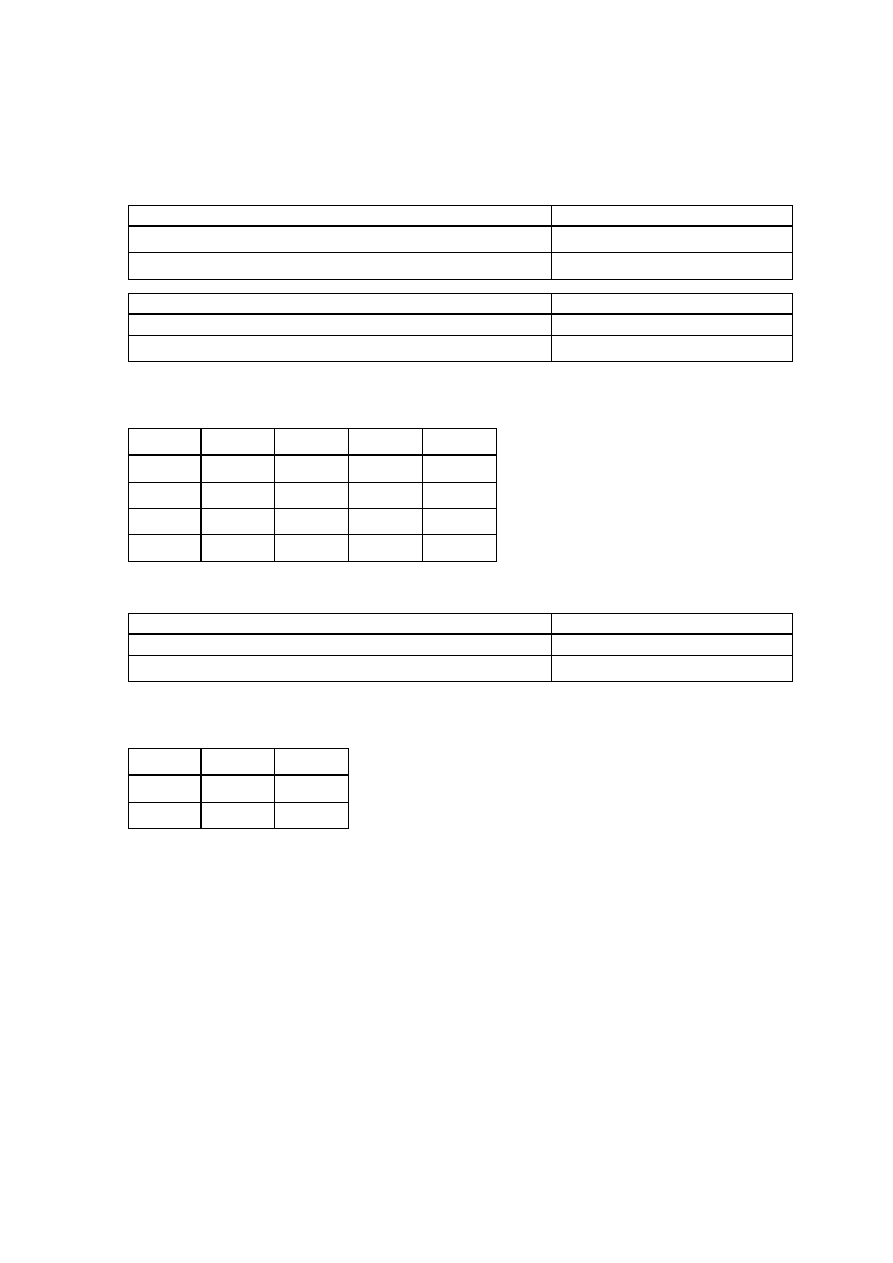
Prostokąt ABCD
Oś symetrii
Przekształcenie symetrii - symbol
Prosta równoległa do podstawy AB dzieląca boki na połowy
Odbicie -
1
P
Prosta równoległa do boku AD dzieląca podstawy na połowy Odbicie -
2
P
Środek symetrii
Przekształcenie symetrii - symbol
Punkt przecięcia przekątnych
Obrót o kąt 0
O
-
I
Punkt przecięcia przekątnych
Obrót o kąt 180
O
-
2
O
Czteroelementowa grupa symetrii prostokąta jest podgrupą symetrii kwadratu, z następującą
tabelką mnożenia:
I
2
O
1
P
2
P
I
I
2
O
1
P
2
P
2
O
2
O
I
2
P
1
P
1
P
1
P
2
P
I
2
O
2
P
2
P
1
P
2
O
I
Równoległobok ABCD
Środek symetrii
Przekształcenie symetrii - symbol
Punkt przecięcia przekątnych
Obrót o kąt 0
O
-
I
Punkt przecięcia przekątnych
Obrót o kąt 180
O
-
2
O
Dwuelementowa grupa symetrii równoległoboku jest podgrupą symetrii kwadratu, z następującą
tabelką mnożenia:
I
2
O
I
I
2
O
2
O
2
O
I
Twierdzenie Lagrange’a o rzędzie grup skończonych (liczba elementów grupy ) mówi, że rząd
podgrupy jest dzielnikiem rzędu grupy. W tym przypadku rzeczywiście tak jest: Grupa symetrii
kwadratu ma rząd 8, podczas gdy jej podgrupy: grupa symetrii rombu, prostokąta i
równoległoboku mają rzędy odpowiednio równe 4, 4 i 2.
2. W Zadaniu 1 opisując poszczególne przekształcenia symetrii czworoboków w języku zmiany
położeń ich wierzchołków ustaliliśmy izomorfizm pomiędzy grupami przekształceń symetrii
kwadratu, prostokąta, rombu oraz równoległoboku a odpowiednimi podgrupami grupy permutacji
zbioru czteroelementowego bowiem traktowaliśmy cztery wierzchołki jako czteroelementowy
zbiór uporządkowany. Każde z przekształceń symetrii może być więc traktowane jako permutacja
czteroelementowego zbioru.
Permutacje odpowiadające obrotom tworzą cykle czteroelementowe. Permutacje odpowiadające
odbiciom
1
P
i
2
P
składają się z dwóch cykli dwuelementowych. Permutacje odpowiadające
odbiciom
1
T
i
2
T
tworzą cykle dwuelementowe.

UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
5
ZADANIA - Seria 2 - Uwagi, szkice rozwiązań - cd
3. Odwzorowanie
G
G
f
:
grupy
)
,
(
G
w grupę
)
,
(
G
nazywa się homomorfizmem, jeśli
)
(
)
(
)
(
b
f
a
f
b
a
f
,
G
b
a
,
Jeśli odwzorowanie to jest jednocześnie bijekcją to nazywa się ono izomorfizmem.
a) Dla wygody opuszczamy znak mnożenia w grupie. Odwzorowanie
2
)
(
x
x
f
jest
homomorfizmem gdy spełniony jest warunek
)
(
)
(
)
(
y
f
x
f
xy
f
czyli
2
2
2
)
(
y
x
xy
Dzięki łączności mnożenia w grupie równanie to można przekształcić do postaci
xxyy
xyxy
W grupie, dla
G
a
istnieje jedyny element odwrotny
1
a
. Mnożąc równanie
lewostronnie przez
1
x
a prawostronnie przez
1
y
sprowadzamy je do postaci
xy
yx
,
a to oznacza, że grupa musi być przemienna.
Odwzorowanie to nie jest izomorfizmem dla każdej grupy przemiennej. Przykłady:
- dla grupy liczb
}
2
,
1
,
0
{
G
z dodawaniem modulo 3, odwzorowanie
2
)
(
x
x
f
jest izomorfizmem:
G
G
f
)
(
,
- dla grupy symetrii prostokąta, rombu, kwadratu oraz dla grupy liczb
}
3
,
2
,
1
,
0
{
G
z dodawaniem modulo 4, nie jest izomorfizmem:
G
G
f
)
(
.
b) Odwzorowanie
1
)
(
x
x
f
jest homomorfizmem gdy spełniony jest warunek
)
(
)
(
)
(
y
f
x
f
xy
f
czyli
1
1
1
)
(
y
x
xy
.
Ale
1
1
1
)
(
yx
y
x
. Warunek ten sprowadza się więc do postaci
1
1
)
(
)
(
yx
xy
,
a to oznacza, że grupa musi być przemienna, bowiem element odwrotny wyznaczony jest
jednoznacznie.
Odwzorowanie to jest izomorfizmem dla każdej grupy przemiennej, bowiem dla
G
a
istnieje jedyny element odwrotny
1
a
.
4. Odwzorowanie
2
1
:
G
G
f
grupy
)
,
(
1
G
w grupę
)
,
(
2
G
jest homomorfizmem, jeśli
spełnia warunek
)
(
)
(
)
(
b
f
a
f
b
a
f
,
G
b
a
,
a) Sprawdzamy warunek
)
(
)
(
)
(
y
f
x
f
xy
f
czyli
a
a
a
y
x
xy
)
(
. Jest on spełniony dla
dowolnego
R
a
. Odwzorowanie
f
jest więc homomorfizmem.
Niech
0
a
. Wtedy odwzorowanie
f
jest injekcją: jeśli
a
a
x
x
2
1
to
2
1
x
x
dla
R
x
x
2
1
,
, oraz surjekcją:
R
R
f
)
(
. Odwzorowanie
f
jest izomorfizmem gdy
0
a
.
Dla
0
a
mamy
}
1
{
)
(
R
f
. Odwzorowanie
f
nie jest izomorfizmem gdy
0
a
.
b) Sprawdzamy warunek
)
(
)
(
)
(
y
f
x
f
xy
f
czyli
y
a
x
a
xy
a
ln
ln
ln
. Jest on
spełniony dla dowolnego
R
a
. Odwzorowanie
f
jest więc homomorfizmem .
Niech
0
a
. Wtedy odwzorowanie
f
jest injekcją: jeśli
2
1
ln
ln
x
a
x
a
to
2
1
x
x
dla
R
x
x
2
1
,
, oraz surjekcją:
R
R
f
)
(
. Odwzorowanie
f
jest izomorfizmem gdy
0
a
.
Dla
0
a
mamy
}
0
{
)
(
R
f
. Odwzorowanie
f
nie jest izomorfizmem gdy
0
a
.
UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
6
ZADANIA - Seria 2 - Uwagi, szkice rozwiązań - cd
c) Sprawdzamy warunek
)
(
)
(
)
(
y
f
x
f
y
x
f
czyli
ay
ax
y
x
a
e
e
e
)
(
. Jest on
spełniony dla dowolnego
R
a
. Odwzorowanie
f
jest więc homomorfizmem.
Niech
0
a
. Wtedy odwzorowanie
f
jest injekcją: jeśli
2
1
ax
ax
e
e
to
2
1
x
x
dla
R
x
x
2
1
,
, oraz surjekcją:
R
R
f
)
(
. Odwzorowanie
f
jest izomorfizmem gdy
0
a
.
Dla
0
a
mamy
}
1
{
)
(
R
f
. Odwzorowanie
f
nie jest izomorfizmem gdy
0
a
.
6. Wystarczy sprawdzić, kiedy przekształcenie
n
Q
m
Q
f
:
postaci
n
kb
a
m
b
a
f
)
(
dla pewnego, ustalonego
Q
k
jest izomorfizmem ( homomorfizm i bijekcja ).
Po pierwsze przekształcenie
f
, jako homomorfizm, musi spełniać warunek
)
(
)
(
])
][
([
m
d
c
f
m
b
a
f
m
d
c
m
b
a
f
czyli
)
(
)
(
)
]
[
(
m
d
c
f
m
b
a
f
m
bc
ad
bdm
ac
f
Korzystając z postaci
f
otrzymujemy
)
)(
(
]
[
n
kd
c
n
kb
a
n
bc
ad
k
bdm
ac
Stąd
n
bc
ad
k
n
bdk
ac
n
bc
ad
k
bdm
ac
]
[
]
[
2
Równanie to jest spełnione gdy
2
k
n
m
.
Po drugie, przekształcenie f jest bijekcją, bowiem dowolny element zbioru
)
( n
Q
można
przedstawić w postaci
n
kb
a
, gdzie
Q
b
a
,
są dowolne, natomiast
Q
k
ustalone.
7. a) Sposób 1.
Szukamy rozwiązań równania
0
7
2
2
x
x
w postaci
2
b
a
x
, gdzie
Q
b
a
,
.
0
7
)
2
(
2
)
2
(
2
b
a
b
a
czyli
0
2
)
2
2
(
7
2
2
2
2
b
ab
a
b
a
Równanie to jest równoważne układowi dwóch równań:
0
7
2
2
2
2
a
b
a
0
2
2
b
ab
ponieważ
Q
2
, natomiast
Q
b
a
,
.
Z drugiego równania
0
)
1
(
a
b
wynika, że
1
a
lub
0
b
. Wstawiając to do
pierwszego równania otrzymujemy:
1
a
i
4
2
b
lub
0
b
i
8
)
1
(
2
a
Tylko pierwszy układ posiada rozwiązania dla
Q
b
a
,
:
1
a
,
2
b
oraz
1
a
,
2
b
Rozpatrywane równanie posiada dwa rozwiązania w ciele
)
2
(
Q
:
2
2
1
1
x
,
2
2
1
2
x
UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
7
ZADANIA - Seria 2 - Uwagi, szkice rozwiązań - cd
a) Sposób 2.
Szukamy rozwiązań równania
0
7
2
2
x
x
w ciele liczb rzeczywistych
)
2
(
Q
R
a
następnie wybieramy te rozwiązania, które należą do ciała
)
2
(
Q
. Sprowadzamy równanie do
postaci kanonicznej
0
7
1
)
1
(
2
x
czyli
8
)
1
(
2
x
skąd
2
2
1
x
.
Oba rozwiązania
2
2
1
1
x
,
2
2
1
2
x
należą do ciała
)
2
(
Q
.
b)
Ciało
11
Z
jest to zbiór liczb
10
,
9
,
8
,
7
,
6
,
5
,
4
,
3
,
2
,
1
,
0
z dodawaniem i mnożeniem modulo 11.
Najprostszym sposobem znalezienia rozwiązań równania
5
2
x
w tym ciele jest sprawdzenie po
kolei, które z elementów ciała spełniają to równanie, to znaczy dla których liczb ich kwadrat daje
przy dzieleniu przez 11 resztę 5. Pisząc kolejne kwadraty: 0, 1, 4, 9, 16 = 11 +5, 25 = 22+3,
36 = 33 +3, 49 = 44 + 5, 64 = 55 + 9, 81 = 88 + 3, 100 = 99 + 1, widzimy, że rozwiązaniami
tego równania w ciele
11
Z
są liczby
4
1
x
,
7
2
x
.
Uwaga. Po znalezieniu pierwszego rozwiązania
4
1
x
można szukać dalszych rozwiązań w
postaci
4
1
y
y
x
. Wówczas otrzymuje się równanie
0
11
8
2
y
y
równoważne ( modulo 11 )
równaniu
0
)
8
(
y
y
. Stąd
0
1
y
,
3
2
y
.
8. Jeśli
x
jest rozwiązaniem równania
a
x
n
w ciele
p
Z
, to znaczy, że reszta z dzielenia przez
p
liczby
n
x
równa jest reszcie z dzielenia przez
p
liczby
a
. W wyrażeniu na dwumian Newtona
k
k
n
n
k
n
k
k
n
n
k
n
p
x
k
n
x
p
x
k
n
p
x
)
(
)
(
)
(
1
0
wszystkie składniki sumy dla
0
k
są podzielne przez
p
. Dlatego reszty z dzielenia przez
p
liczb
n
x
i
n
p
x
)
(
są takie same. Tak więc, jeśli
x
jest rozwiązaniem równania
a
x
n
w ciele
p
Z
, to także
p
x
jest rozwiązaniem tego równania w ciele
p
Z
.
Uwaga . Liczba
x
p
nie musi być rozwiązaniem tego równania w ciele
p
Z
.
Przykład:
3
n
,
5
p
,
3
x
.
9. We wszystkich trzech przypadkach zbiór wielomianów jest grupą przemienną z uwagi na
dodawanie wielomianów. Także mnożenie wielomianów przez odpowiednie liczby spełnia
wszystkie konieczne w definicji przestrzeni liniowej aksjomaty. Pozostaje jedynie ustalić, które ze
zbiorów liczb są ciałami. Zbiór liczb rzeczywistych
R
oraz zbiór liczb wymiernych
Q
są ciałami,
natomiast zbiór liczb całkowitych
Z
ciałem nie jest. Dlatego zbiory wielomianów
]
[
n
R
nad
R
oraz
]
[
n
Q
nad
Q
, z tak określonymi działaniami są przestrzeniami liniowymi, natomiast
]
[
n
Z
nie.

UKSW ALGEBRA LINIOWA
Matematyka, Informatyka i ekonometria Kazimierz Jezuita
8
ZADANIA - Seria 2 - Uwagi, szkice rozwiązań – Cd
Zbiór wielomianów
]
[
n
Q
jest podzbiorem zbioru wielomianów
]
[
n
R
. Jednak przestrzeń liniowa
]
[
n
Q
nad ciałem
Q
nie jest podprzestrzenią liniową przestrzeni liniowej
]
[
n
R
nad ciałem
R
,
ponieważ są one rozpięte nad innymi ciałami – wielomiany z
]
[
n
Q
pomnożone przez liczbę
rzeczywistą, niewymierną nie należą do
]
[
n
Q
.
Przestrzenie liniowe
]
[
n
R
i
]
[
n
Q
nie są homomorficzne ponieważ homomorfizm
:
f
]
[
n
R
]
[
n
Q
powinien zachowywać mnożenie wektora przez liczbę
)
(
)
(
v
f
v
f
a to wymaga aby obie przestrzenie były rozpięte nad tym samym ciałem. W przypadku
0
n
istnienie homomorfizmu przestrzeni liniowych
R
R
]
[
0
i
Q
Q
]
[
0
oznaczałoby, że ciała
R
i
Q
są homomorficzne ( a tym samym izomorficzne ) co oczywiście nie ma miejsca.
10. Przekształcenie przestrzeni liniowych
f
jest homomorfizmem ( przekształceniem liniowym ) jeśli
zachowuje oba działania przestrzeni liniowych: dodawanie wektorów i mnożenie wektora przez
liczbę. Oznacza to, że przekształcenie
f
jest przemienne z dodawaniem wektorów i mnożeniem
wektora przez liczbę. Przekształcenie liniowe przeprowadza więc kombinację liniową wektorów
na kombinację liniową ich obrazów o tych samych współczynnikach liczbowych
)
(
)
(
2
2
1
1
2
2
1
1
w
f
w
f
w
w
f
W tym przypadku przekształcenie
f
polegające na mnożeniu wielomianów przez ustalony
wielomian:
]
[
]
[
s
n
n
R
gw
w
R
, dla ustalonego
]
[
s
R
g
,
jest przekształceniem liniowym ponieważ spełnia ten warunek
)
(
)
(
)
(
)
(
)
(
)
(
)
(
2
2
1
1
2
2
1
1
x
w
x
g
x
w
x
g
x
w
x
w
x
g
Wyszukiwarka
Podobne podstrony:
al lin zad3 rozw
al lin zad5 rozw
al lin zad1 rozw
al lin zad4 rozw
al lin zad7 rozw
al lin zad6 rozw
al lin zad3 rozw
al lin zad5 rozw
al lin zad dom1
Zad2-rozw, PWR, ZiP Mechaniczny, 1 semestr, Mikroekonomia (ZipPwr)
al lin zad dom4
al lin zad dom3
al lin zad dom2
regresja lin 2 wzor rozw(2)
regresja lin 2 wzor rozw
regresja lin 2 wzor rozw
regresja lin 2 wzor rozw(1)
czerwiec 2006 zad2 przykł rozw(1)
więcej podobnych podstron