Przedmiot: MODELOWANIE UKŁADÓW
MECHATRONICZNYCH
Prowadzący: dr hab. inż. Krzysztof KALIŃSKI, prof. nadzw. PG
Katedra Mechaniki i Mechatroniki
109 WM,
kkalinsk@o2.pl
Konsultacje:
wtorek 13:00–14:00
czwartek 11:00–12:00
Wiadomości organizacyjne
1.Wykład
15 godzin – zalecana obecność
2.Ćwiczenia laboratoryjne 15 godzin – obecność obowiązkowa
3.Ćwiczenia projektowe 15 godzin – obecność obowiązkowa
4.
Zaliczenie ćwiczeń laboratoryjnych i projektowych
5.
Egzamin:
– obejmuje materiał wykładów
– warunek konieczny –
zaliczone laboratorium oraz 2 projekty
Materiały z wykładów:
https://sites.google.com/a/mech.pg.gda.pl/krzysztof-kalinski/
Literatura:
1. Heimann B., Gerth W., Popp K.: Mechatronika. Komponenty – metody –
przykłady. Warszawa: Wyd. Nauk. PWN 2001.
2. Gawrysiak M.: Mechatronika i projektowanie mechatroniczne. Białystok: Wyd.
Polit. Białostockiej 1997.
(jest dostępna w internecie)
3. Metoda elementów skończonych w dynamice konstrukcji. Gawroński W.,
Kruszewski J., Ostachowicz W., Tarnowski J., Wittbrodt E. Warszawa: Arkady
1984.
4. Cannon H. C.: Dynamika układów fizycznych. Warszawa: WNT 1973.
5. Kaczorek T.: Teoria sterowania i systemów. Warszawa: Wyd. Nauk. PWN 1993.
6. Grzegożek W., Adamiec-Wójcik I., Wojciech S.: Komputerowe modelowanie
dynamiki pojazdów samochodowych. Kraków: Politechnika Krakowska im. T.
Kościuszki 2003.
(literatura uzupełniająca)
Sprawy porządkowe:
1.We wszystkich budynkach i pomieszczeniach obowiązuje całkowity
zakaz palenia tytoniu
2.Zabrania się wnoszenia na salę wykładową wszelkiego rodzaju
urządzeń, które swoim działaniem mogłyby zakłócić przebieg zajęć.
Dotyczy to m.in. uaktywnionych telefonów komórkowych
3.W salach wykładowych zabrania się spożywania posiłków oraz picia
wszelkiego rodzaju napojów
W trakcie wykładu na sali obowiązuje cisza
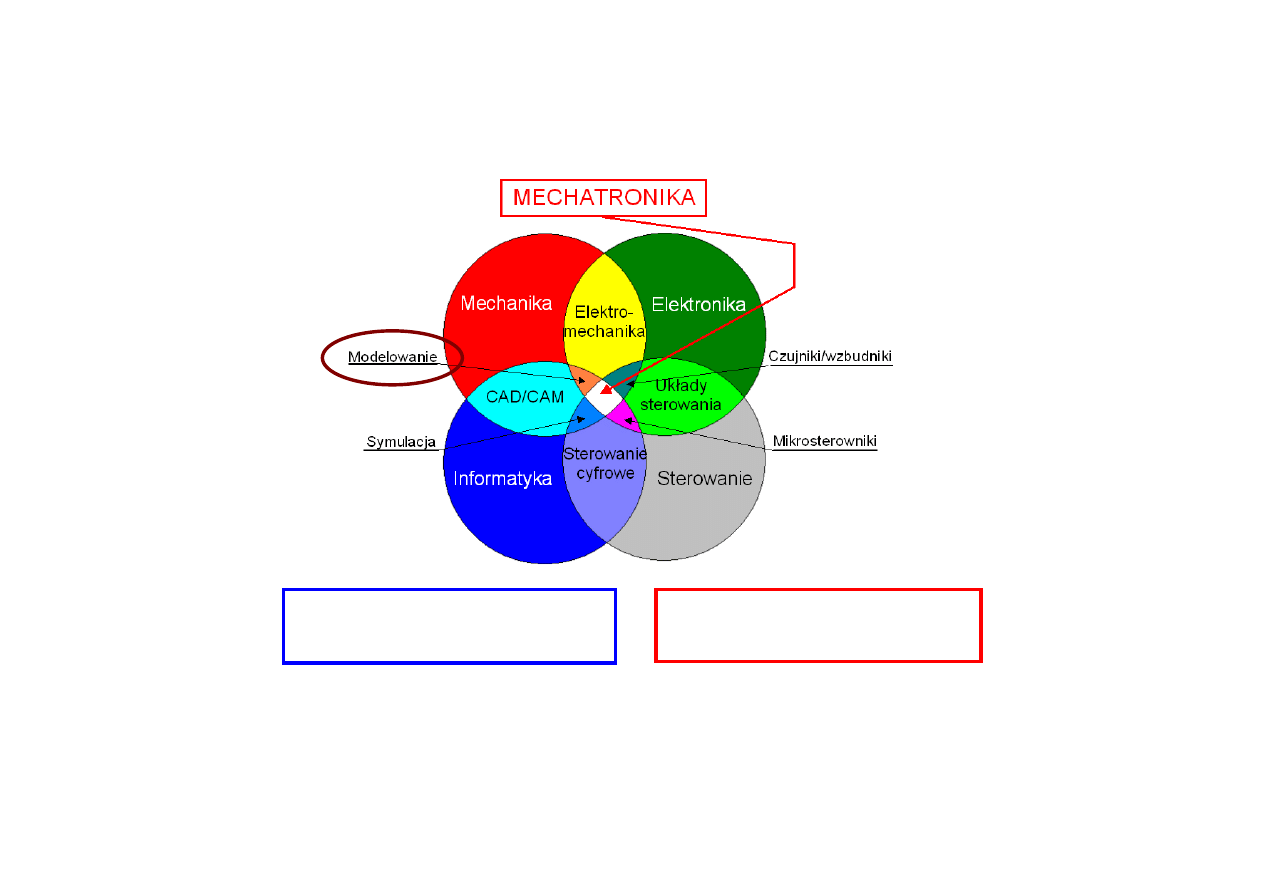
Modelowanie układów mechatronicznych – pojęcia podstawowe
Multidyscyplinarność ⇒
⇒
⇒
⇒
Interdyscyplinarność
wiele dyscyplin
wiele dyscyplin
istniejących oddzielnie
zintegrowanych w całość
Spójne podejście do modelowania wszystkich elementów składowych

Modelowanie w mechatronice polega na:
⇒
umiejętności zastępowania obiektów rzeczywistych
(mechatronicznych) odpowiednimi układami abstrakcyjnymi
⇒
umiejętności pomijania mniej istotnych czynników
⇒
umiejętności opisywania danego problemu za pomocą równań
matematycznych
⇒
umiejętności rozwiązywania zdefiniowanego problemu
Trudności matematyczne ⇒ prawa opisujące tzw. „fizykę zjawisk” w
swojej użytkowej formie podlegają znacznym ograniczeniom i
uproszczeniom, a mimo to są zwykle jednymi z najogólniejszych praw
przyrody stosowanymi przez inżynierów.

Definicja: Rzeczywisty obiekt mechatroniczny jest to obiekt
istniejący w rzeczywistości lub możliwy do zrealizowania
Definicja: Model fizyczny jest to myślowo uproszczony obiekt
rzeczywisty zapewniający dostatecznie dokładne
odzwierciedlenie zjawisk zachodzących w obiekcie
rzeczywistym, umożliwiający zastosowanie prostego opisu
zachodzących zjawisk
Definicja: Model matematyczny jest to matematyczny opis zjawisk
zachodzących w modelu fizycznym, podany w formie
usystematyzowanych wzorów lub równań – algorytm
Definicja: Modelowanie jest to czynność polegająca na przejściu od
obiektu rzeczywistego, poprzez model fizyczny, do modelu
matematycznego
Sztuka inżynierska ⇒ dobieranie takich modeli, aby:
- błędy były jak najmniejsze
- można było przewidzieć wielkość błędów
Podejście deterministyczne
– aktualnie dominujące na świecie
opis własności układów mechatronicznych (wraz z wartościami
parametrów modeli), z jednoczesnym spełnieniem warunku
powtarzalności
Inne podejścia – dopuszczają niepewność modelowania
Weryfikacja negatywna ⇒ zmienić model tak, aby zmniejszyć błędy z
niego wynikające
⇒
zmiana modelu fizycznego na obiekt bardziej odzwierciedlający
rzeczywistość
⇒
mniejsze uproszczenia w modelu matematycznym
⇒
dokładniejsze obliczenia modelu matematycznego
Problemy szczegółowe modelowania układów mechatronicznych
Tworzenie modeli obliczeniowych
– modele elementów składowych układów mechatronicznych
(elementy mechaniczne, elektryczne, hydrauliczne, termiczne)
– modele układów wielomasowych.
– modele strukturalne – uwzględniają podatność elementów
mechanicznych
(modele metody elementów skończonych)
– modele modalne – alternatywna forma opisu własności
strukturalnych układów
Opis matematyczny
– analogie między środowiskami fizycznymi.
– równania dynamiki we współrzędnych uogólnionych
– równania dynamiki we współrzędnych stanu.

Sterowanie układów mechatronicznych
– Wielowymiarowe układy sterowania.
– Sterowanie modalne.
– Optymalne sterowanie liniowe.
Podział układów mechatronicznych z uwagi na zmienność parametrów
modeli obliczeniowych:
– liniowe układy stacjonarne – parametry niezmienne w czasie
– liniowe układy niestacjonarne – zmiany w czasie parametrów opisane
znanymi funkcjami czasu
– układy nieliniowe – zmiany parametrów opisane nieznanymi
funkcjami czasu
W modelowaniu układów mechatronicznych można wyróżnić:
– modelowanie obiektów (opis matematyczny, parametry modeli)
– modelowanie sygnałów

Zadania modelowania układów mechatronicznych
1. Modelowanie otwartych układów sterowania
– definiowanie własności elementów składowych w postaci
równań
różniczkowych,
transmitancji
operatorowych,
charakterystyk
częstotliwościowych,
charakterystyk
statycznych
2. Modelowanie układów ze sprzężeniem zwrotnym
– synteza układów funkcjonalnych, w konwencji schematów
blokowych układów automatyki
– uwzględnienie sprzężeń opóźniających
– zwrócenie szczególnej uwagi na problemy stabilności i jakości
układów
Do rozwiązywania zadań modelowania układów mechatronicznych
zaleca się oprogramowanie AMESim (dostępne w Katedrze
Mechaniki i Mechatroniki)
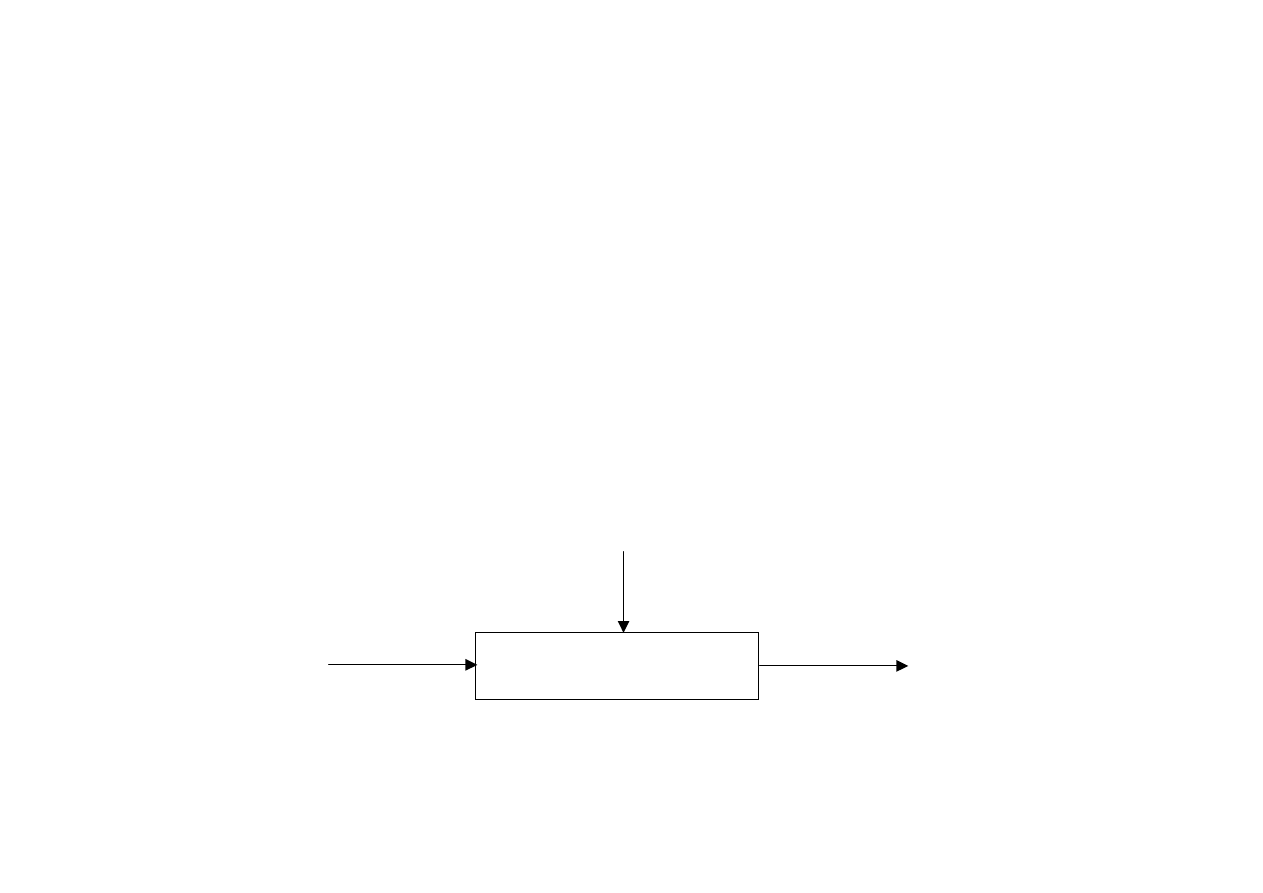
Modelowanie sygnałów
Sygnał jest określoną wielkością fizyczną oddziaływującą na obiekt.
Rozróżniamy sygnały:
Wejściowe, które są najczęściej znanymi wielkościami fizycznymi
i stanowią formę oddziaływania środowiska na badany obiekt.
Wyjściowe (odpowiedzi) są to wielkości fizyczne, które stanowią reakcję
badanego obiektu na określone wejście.
Zakłócenia są to sygnały, które nie są ani wejściem ani odpowiedzią.
OBIEKT
WE
WY
Z
Pomimo, że wejściem oraz wyjściem mogą być dowolne wielkości fizyczne
należy je dobierać tak, aby wyjście było skutkiem zaś wejście przyczyną
oddziaływania.
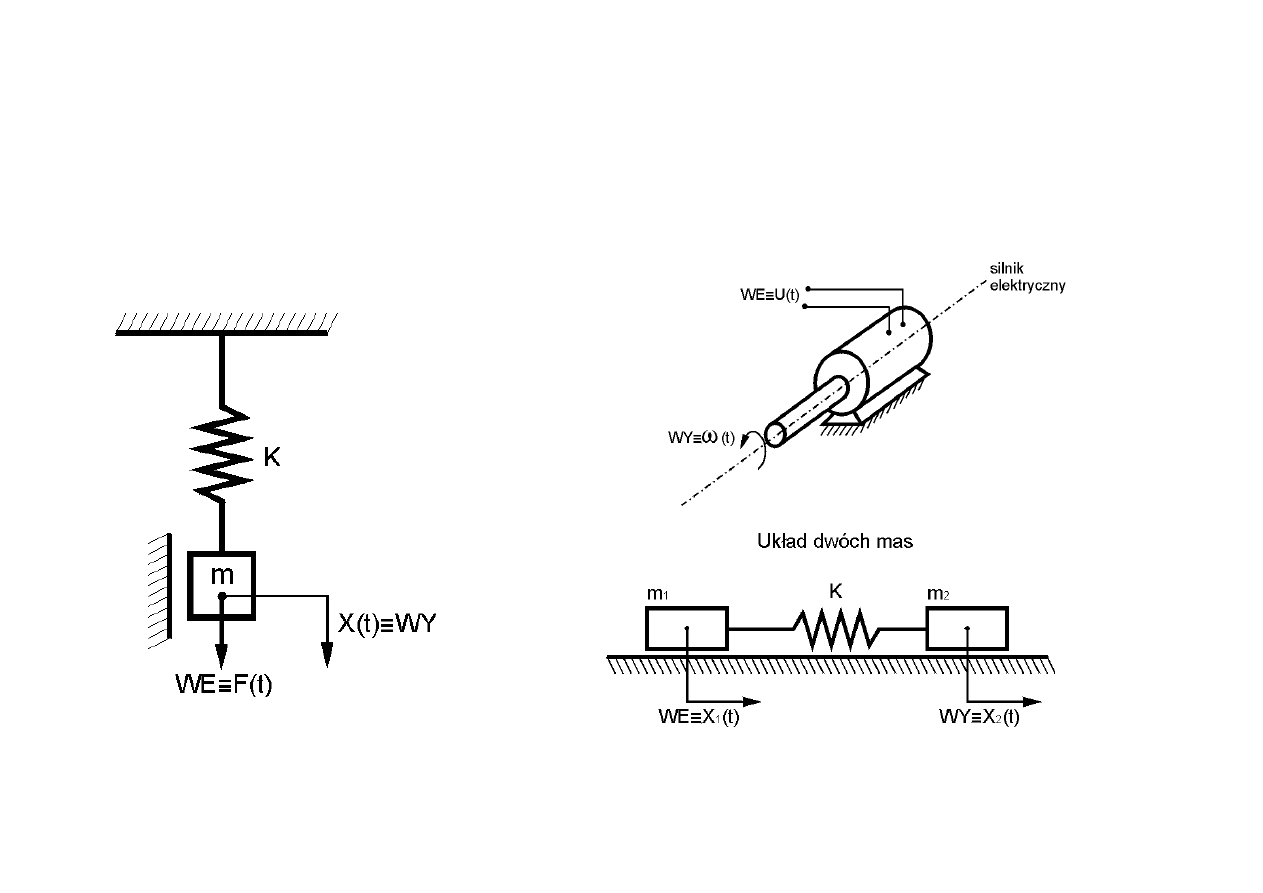
Przykłady:
Wyszukiwarka
Podobne podstrony:
MUM wykład12
MUM wykład10
MUM wykład7
MUM-wykład6
MUM wykład4
MUM wykład3
MUM wykład8
MUM wykład6
MUM wykład4a
MUM Wykład8a
Napęd Elektryczny wykład
więcej podobnych podstron