Układy nieliniowe
Podstawy automatyki
Układy nieliniowe wykazują cztery właściwości
znacznie
różniące je od układów liniowych:
1) nie
spełniają zasady superpozycji,
2) charakter odpowiedzi w stanie ustalonym w
sposób
istotny
zależy od amplitudy sygnału sterującego lub
amplitudy
zakłócenia,
3)
odpowiedź w stanie ustalonym oprócz częstotliwości
pochodzącej od wymuszenia lub zakłócenia może
dodatkowo
zawierać inne harmoniczne,
4)
stabilność układów w istotny sposób zależy od wartości
warunków początkowych, przykładowo:
•
dla
małych wartości warunków początkowych układ
może być stabilny,
•
dla
dużych wartości warunków początkowych układ
może być niestabilny.
Zasada superpozycji - przypomnienie
Zasada superpozycji stosowana jest w analizie i syntezie
liniowych
układów regulacji. Brzmi ona następująco:
Reakcja układu liniowego na sumę sygnałów
jest równa sumie reakcji na każdy sygnał osobno.
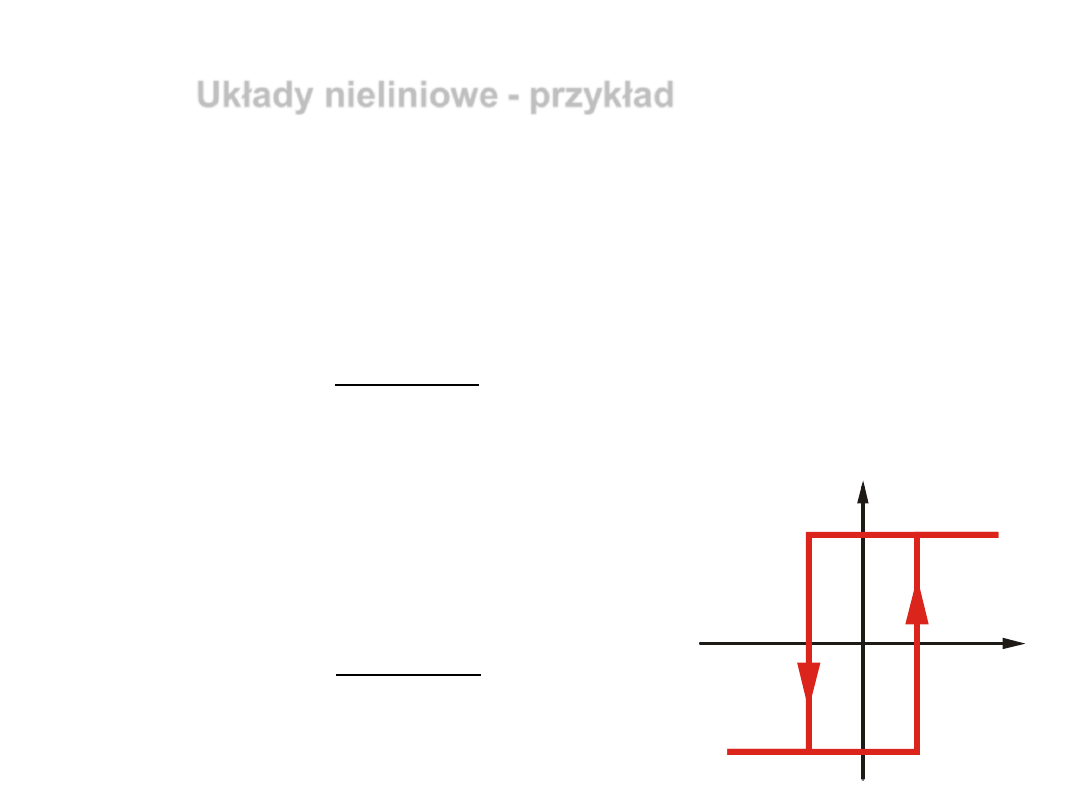
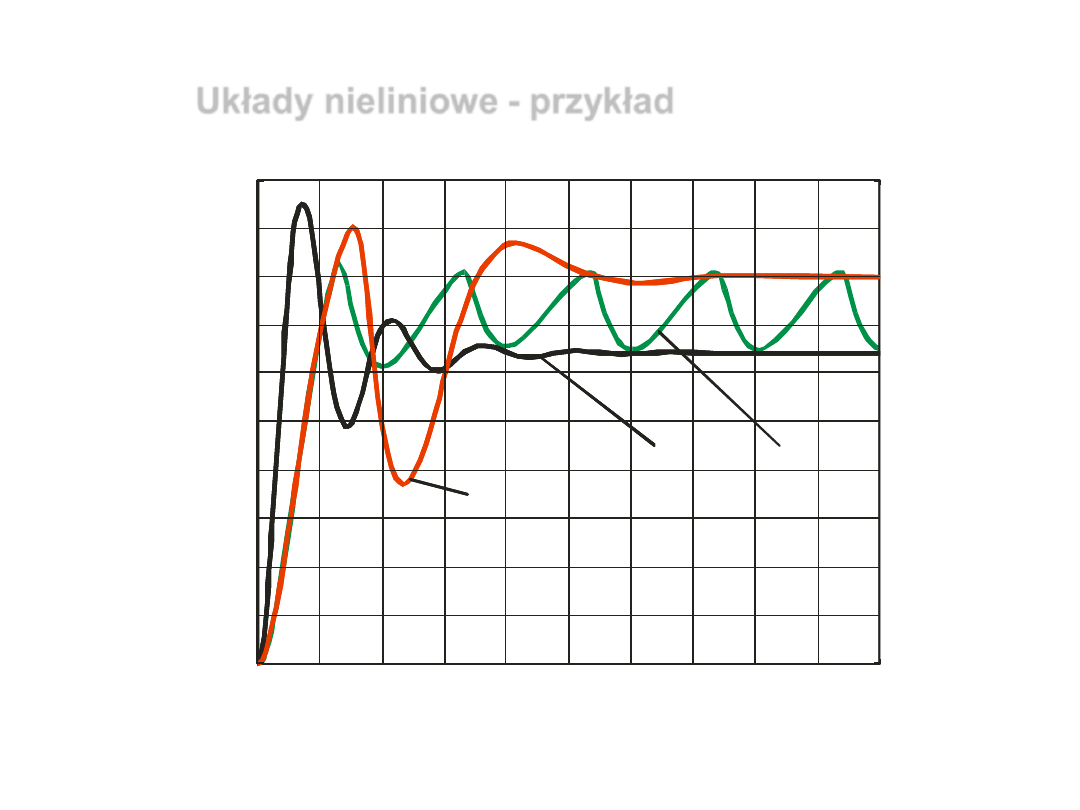
Układy nieliniowe - przykład
Mamy trzy układy regulacji z jednostkowym sprzężeniem
zwrotnym:
1) układ liniowy opisany funkcją przejścia toru głównego
1
s
s
4
G(s)
2
2)
układ nieliniowy zawierający człon
liniowy opisany
poniższą funkcją przejścia
oraz
człon o charakterystyce przekaźnika
dwupołożeniowego
e
u
0 .5
2
-0 .5
-2
1
s
s
2
G(s)
2
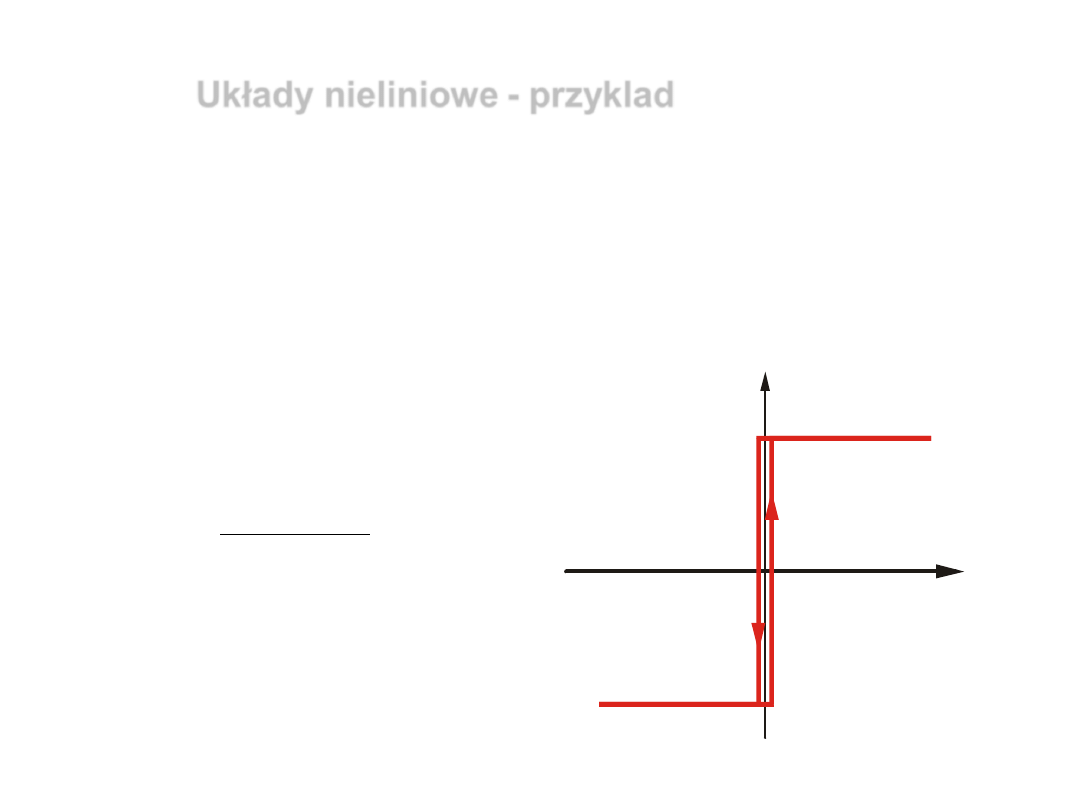
Układy nieliniowe - przyklad
3)
układ nieliniowy zawierający człon liniowy opisany poniższą
funkcją przejścia oraz człon o charakterystyce przekaźnika
dwupołożeniowego
1
s
s
2
G(s)
2
e
u
0 .0 5
2
-0 .0 5
-2
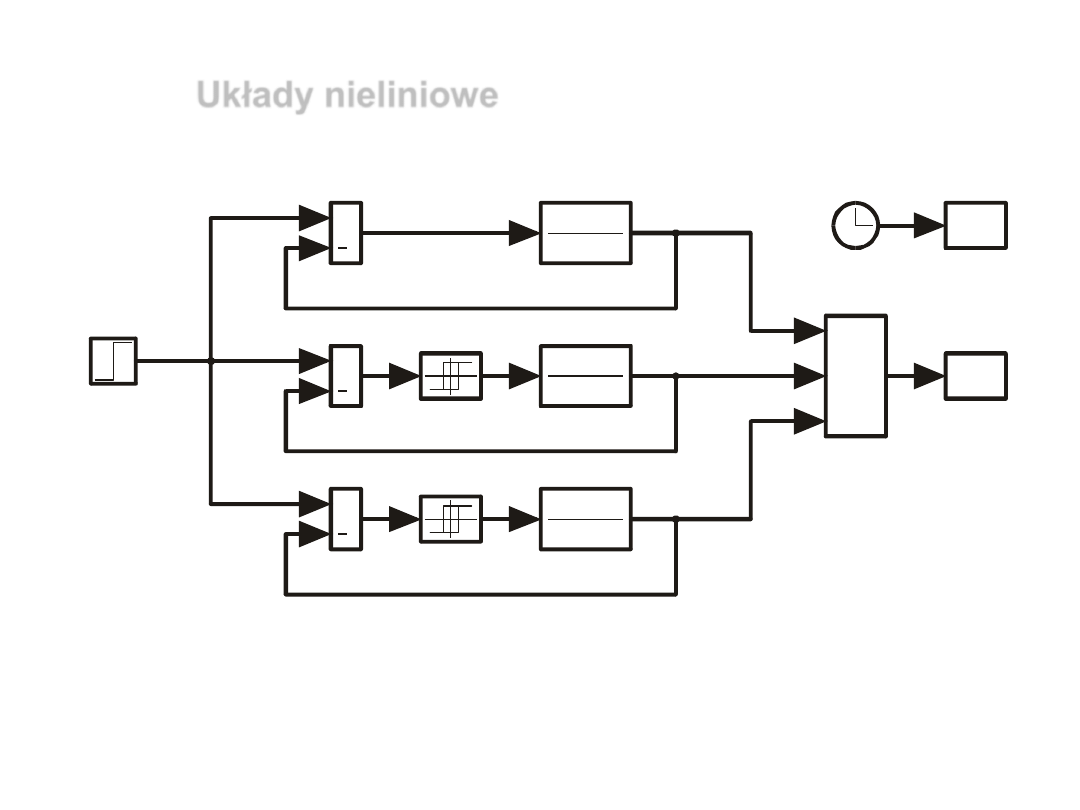
Układy nieliniowe
Schematy blokowe układów regulacji
t
w
+
e
4
s +s +1
2
y 1
U k ła d 1
+
e
P rz e k_ 1
u
2
s +s +1
2
y 2
U k ła d 2
+
e
P rz e k_ 2
u
2
s +s +1
2
y 3
U k ła d 3
M ux
y
Układy nieliniowe - przykład
Wszystkie układy poddano jednocześnie działaniu poniższych
sygnałów skokowych:
-
sygnału w(t) = A
w
·1(t), gdzie A
w
= 1 i otrzymano wyniki jak
na rysunku 1.
-
sygnału w(t) = A
w
·1(t), gdzie A
w
= 4 i otrzymano wyniki jak
na rysunku 2.
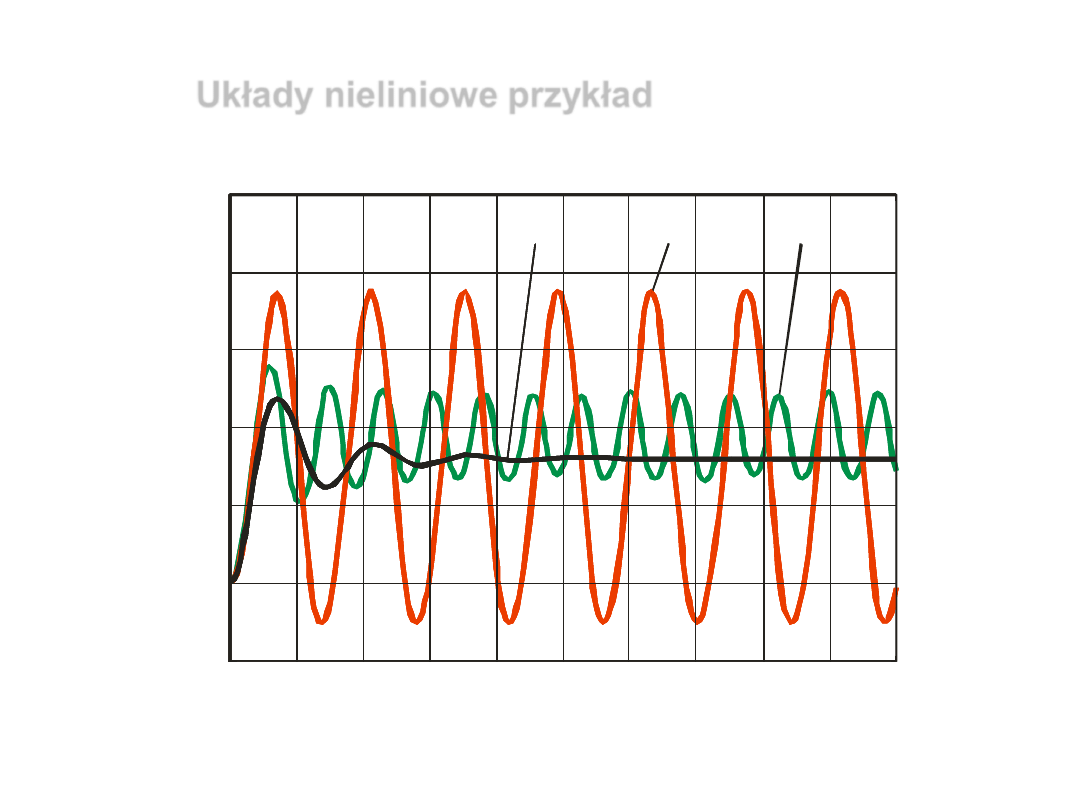
Układy nieliniowe przykład
Rys. 1.
Charakterystyki skokowe układów dla A
w
= 1
0
2
4
6
8
10
12
14
16
18
20
Czas [s]
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
y
Układ 1
Układ 2
Układ 3
w(t)=1*1(t)
0
2
4
6
8
10
12
14
16
18
20
Czas [s]
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
y
Układ 1
Układ 2
w(t)=1*1(t)
0
2
4
6
8
10
12
14
16
18
20
Czas [s]
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
y
Układ 1
w(t)=1*1(t)
Układy nieliniowe - przykład
Rys. 2.
Charakterystyki skokowe układów dla A
w
= 4
0
2
4
6
8
10
12
14
16
18
20
Cz as [s]
0. 0
0.5
1. 0
1.5
2. 0
2.5
3. 0
3.5
4. 0
4.5
5. 0
y1,
y
2,
y
3
Układ 1
Układ 2
Układ 3
w(t)=4 *1 (t)
0
2
4
6
8
10
12
14
16
18
20
Cz as [s]
0. 0
0.5
1. 0
1.5
2. 0
2.5
3. 0
3.5
4. 0
4.5
5. 0
y1,
y
2,
y
3
w(t)=4 *1 (t)
0
2
4
6
8
10
12
14
16
18
20
Cz as [s]
0. 0
0.5
1. 0
1.5
2. 0
2.5
3. 0
3.5
4. 0
4.5
5. 0
y1,
y
2,
y
3
Układ 1
w(t)=4 *1 (t)
0
2
4
6
8
10
12
14
16
18
20
Cz as [s]
0. 0
0.5
1. 0
1.5
2. 0
2.5
3. 0
3.5
4. 0
4.5
5. 0
y1,
y
2,
y
3
Układ 1
Układ 2
w(t)=4 *1 (t)
Układy nieliniowe - przykład
Wnioski :
-
układ 1 zachowuje się tak, że na podstawie charakte-
rystyki dla A
w
= 1
można wyznaczyć charakterystykę dla
A
w
= 4,
- w przypadku
układu 2 i 3 na podstawie charakterystyk
dla A
w
= 1 nie
można wyznaczyć charakterystyk dla A
w
=
4.
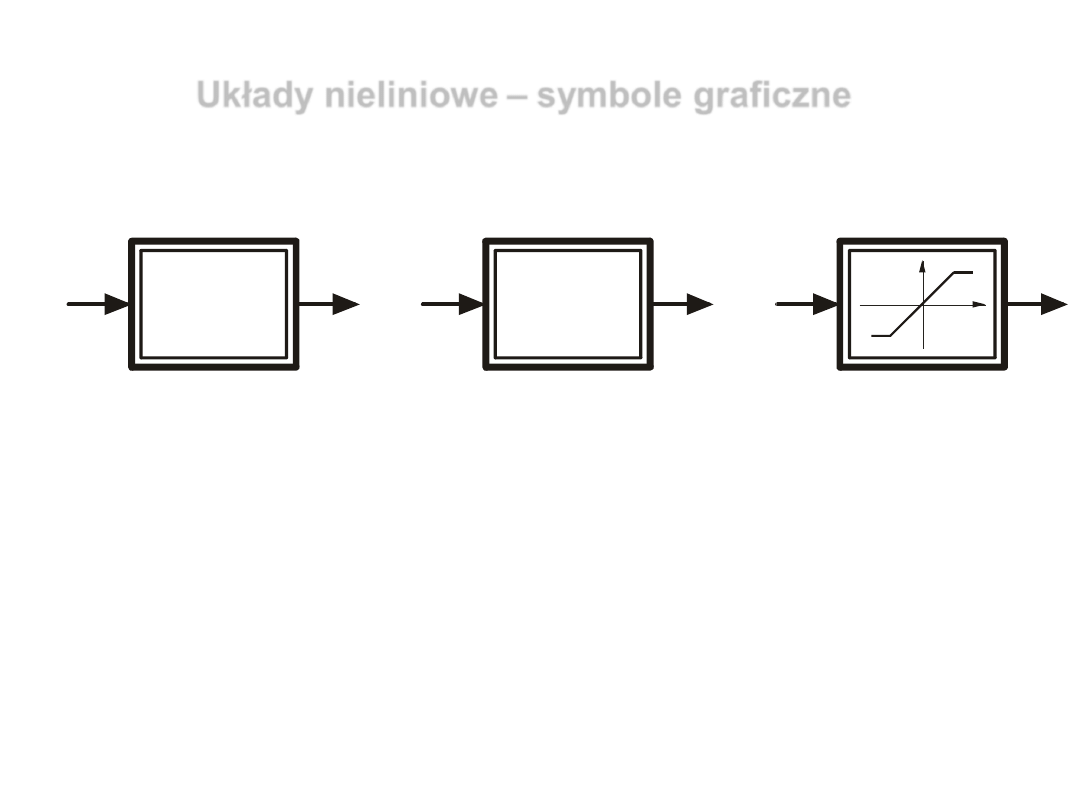
Układy nieliniowe – symbole graficzne
Symbole graficzne
członów nieliniowych:
a) symbol
ogólny;
b) charakterystyka dana wzorem;
c) charakterystyka dana graficznie
a)
u
y
b)
u
y f u
=
( )
y
c)
u
u
y
y
Układy nieliniowe
Ogólnie odpowiedź y(t) członu nieliniowego jest związana z
wymuszeniem u(t) tego
członu nieliniowym równaniem
różniczkowym n-tego rzędu
0
t)
u,
,...,
u
,
u
y,
,...,
y
,
F(y
-1)
(m
(m)
-1)
(n
(n)
y
D
dt
y
d
y
n
n
n
(n)
gdzie:
u
D
dt
u
d
u
n
m
m
(m)
Układy nieliniowe
W przypadku szczególnym powyższe równanie może przyjąć
postać algebraiczną przedstawiającą model nieautonomiczny
F(y,u,t) = 0
Gdy czas nie
występuje w postaci jawnej, to człon opisujemy
równaniem autonomicznym, nazywanym charakterystyką
statyczną
F(y,u) = 0
którą zwykle staramy się przedstawić w postaci
y = f(u)
Układy nieliniowe – wybrane charakterystyki
statyczne
Do bardzo
często spotykanych członów nieliniowych zaliczamy:
a)
człon ze strefą nieczułości,
b)
człon z nasyceniem,
c)
człon ze strefą nieczułości i nasyceniem,
d)
człon ze skokiem początkowym i nasyceniem,
e)
przekaźnik dwupołożeniowy bez histerezy,
f)
przekaźnik dwupołożeniowy z histerezą,
g)
przekaźnik trójpołożeniowy bez histerezy,
h)
przekaźnik trójpołożeniowy z histerezą.
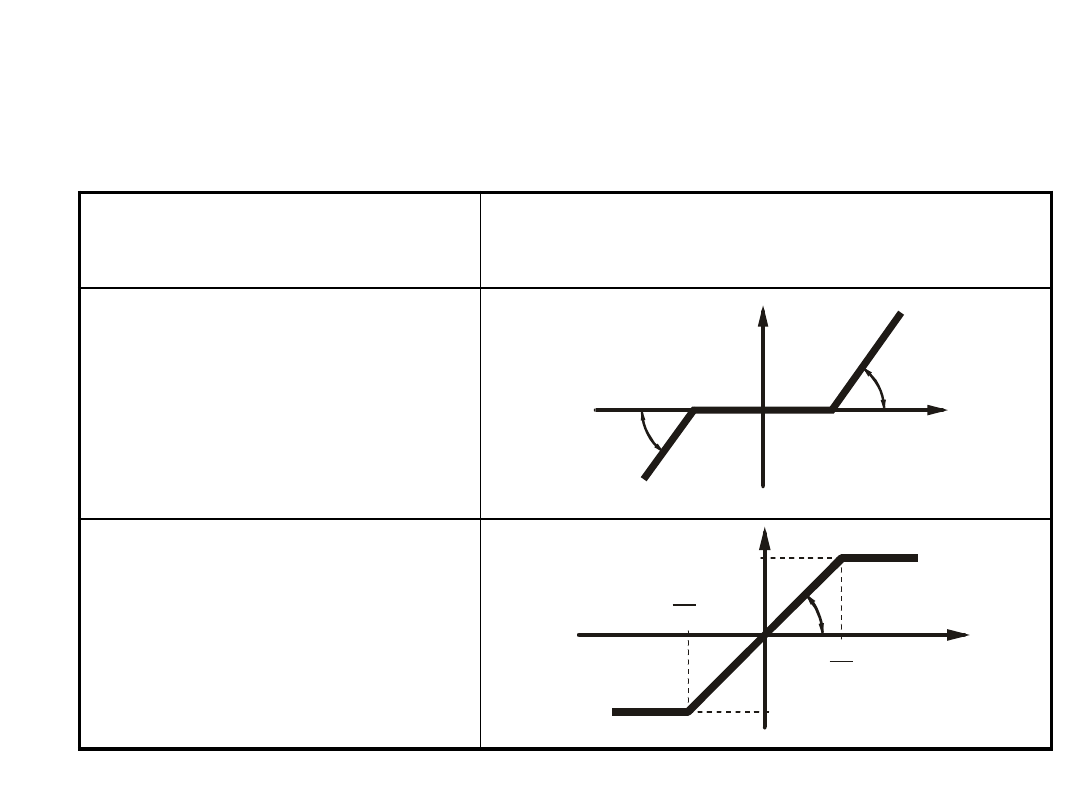
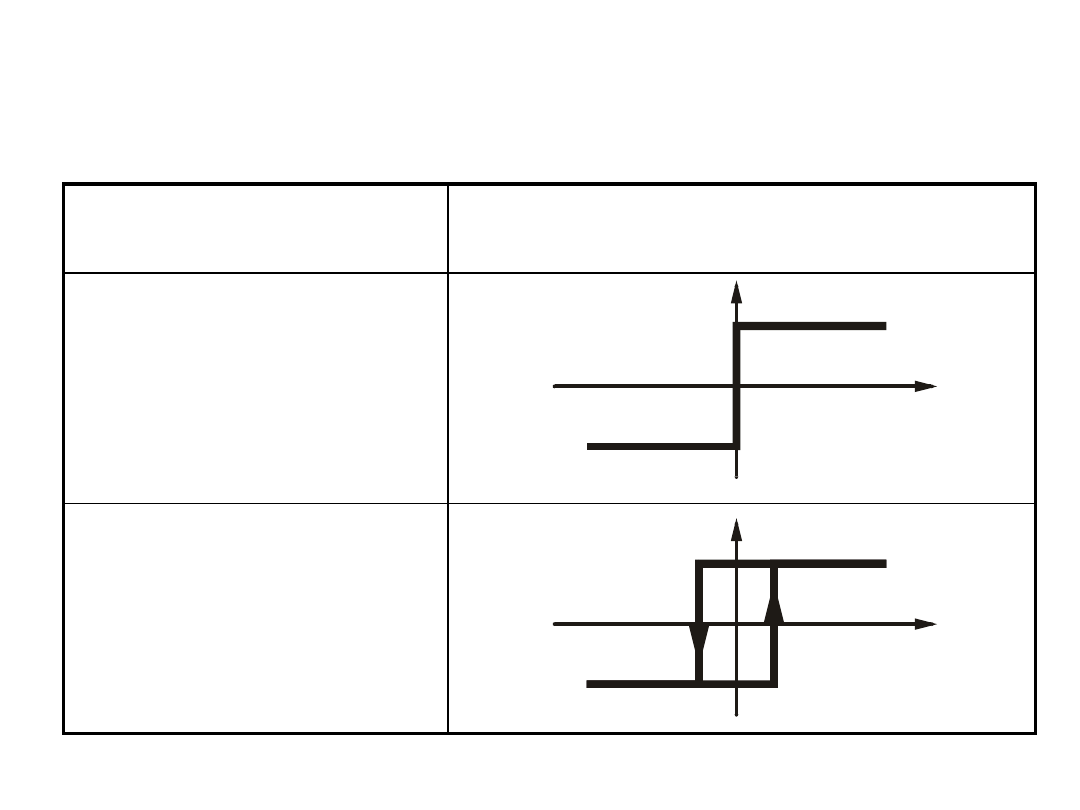
Charakterystyki statyczne wybranych członów
nieliniowych
Nazwa członu
Charakterystyka członu y = f(u)
Człon ze strefą
nieczułości
0
u
y
α
- a
a
α
k
=
tg α
0
u
y
α
B
k
-B
B
k
B
k
=
tg α
Człon z
nasyceniem
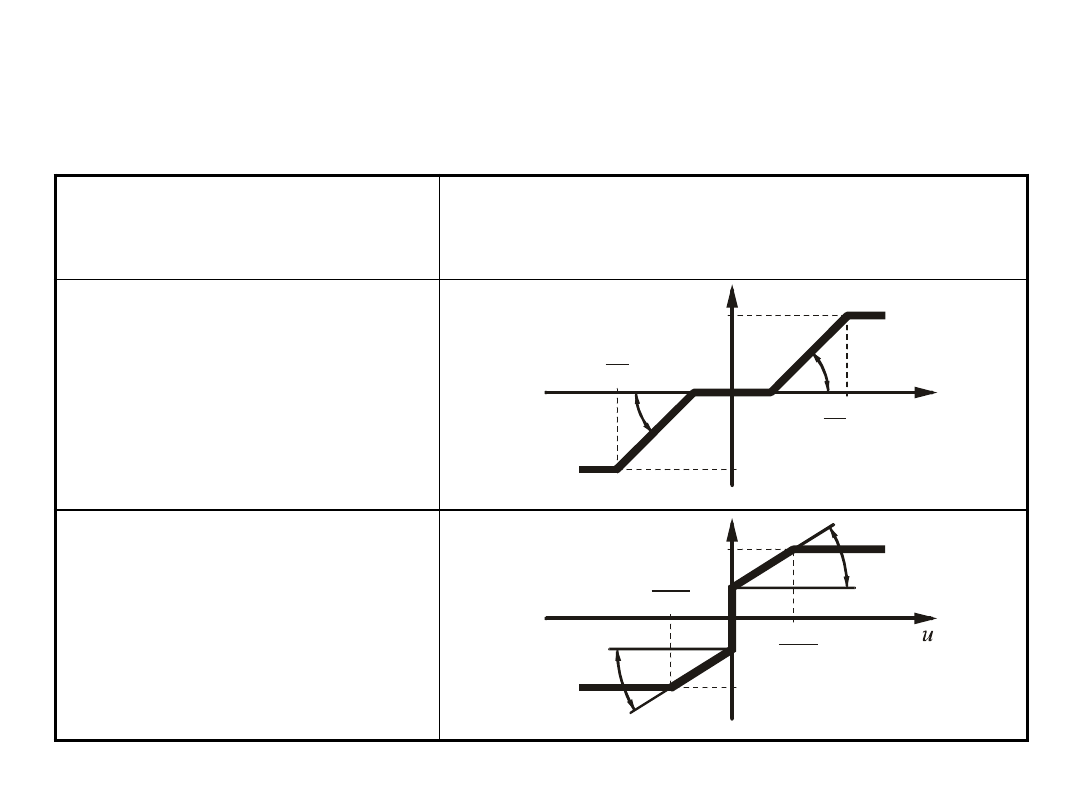
Charakterystyki statyczne wybranych członów
nieliniowych
Nazwa członu
Charakterystyka członu y = f(u)
Człon ze strefą
nieczułości
i nasyceniem
0
u
y
a
B
k
-B
α
-a
a
α
+ a
B
k
B
k
=
tg α
0
y
α
B b
k
-B
-b
b
B b
k
B
α
k
=
tg α
Człon ze
skokiem
początkowym
i nasyceniem
Charakterystyki statyczne wybranych członów
nieliniowych
Nazwa członu
Charakterystyka członu y = f(u)
0
u
y
-B
B
y
0
u
-a
-B
B
a
Przekaźnik
dwupołożeniowy
bez histerezy
(idealny)
Przekaźnik
dwupołożeniowy
z histerezą
(rzeczywisty)
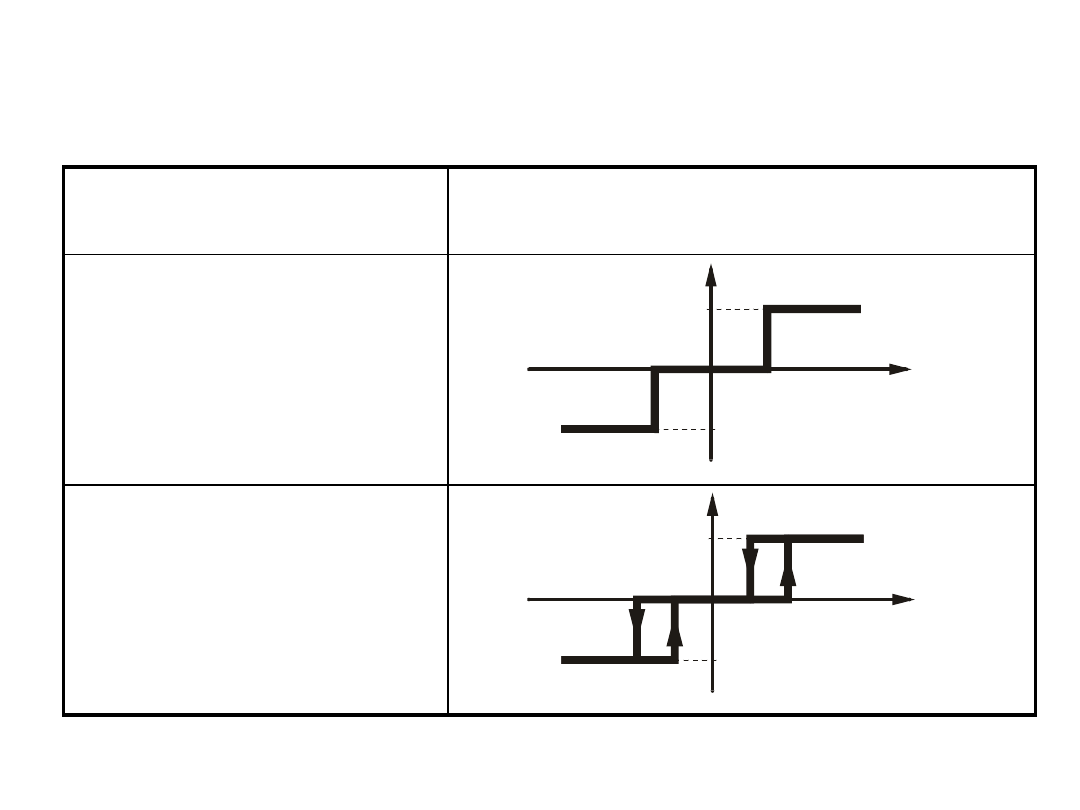
Charakterystyki statyczne wybranych członów
nieliniowych
Nazwa członu
Charakterystyka członu y = f(u)
a
0
u
y
- a
-B
B
0
u
y
-a
1
- a
2
-B
B
a
1
a
2
Przekaźnik
trójpołożeniowy
bez histerezy
(idealny)
Przekaźnik
trójpołożeniowy z
histerezą
(rzeczywisty)
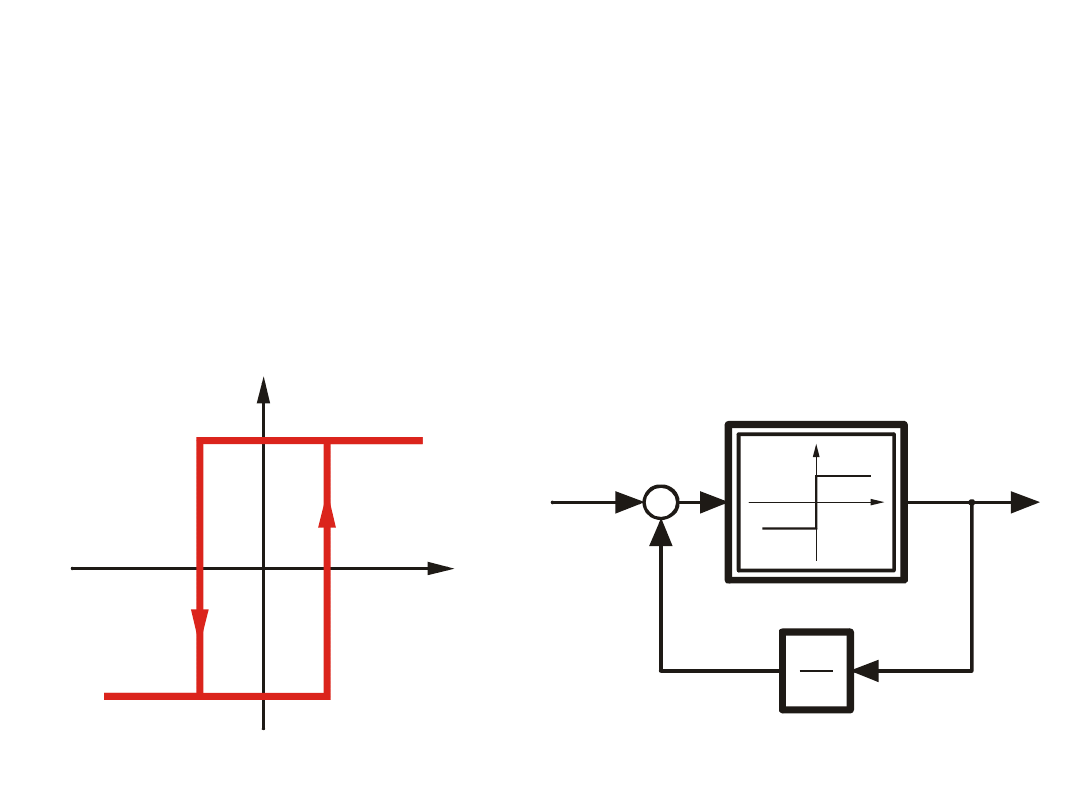
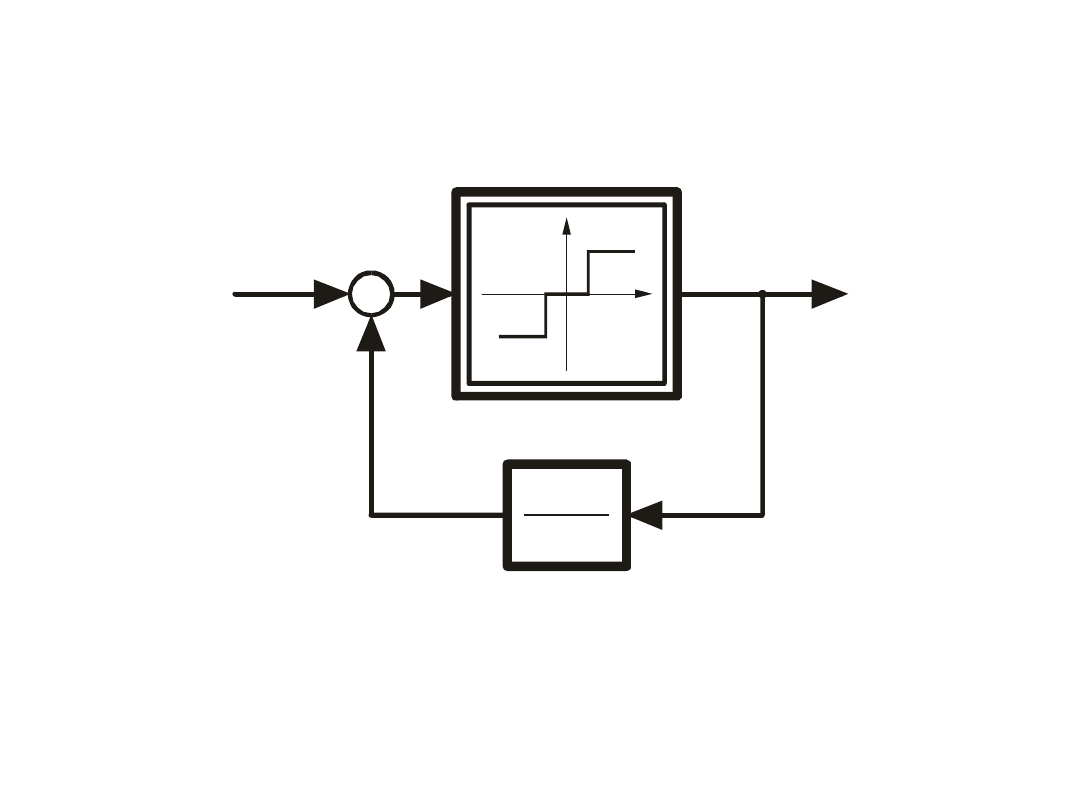
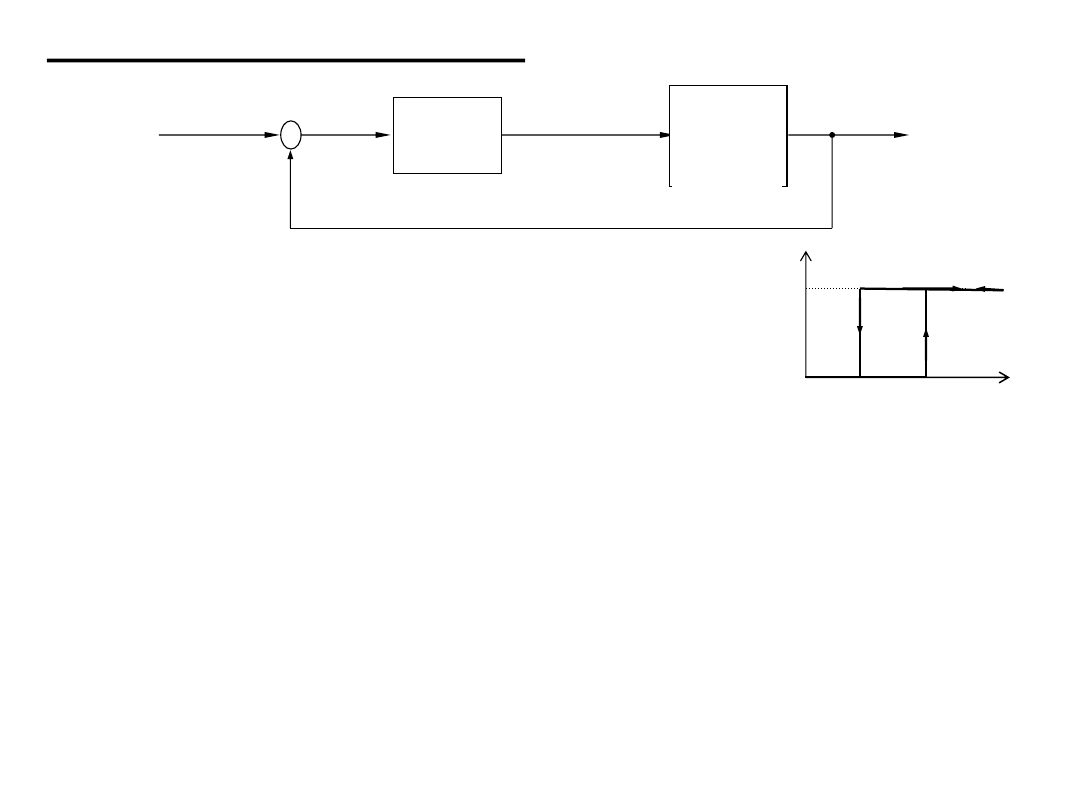
Wybrane schematy zastępcze członów
przekaźnikowych
Dla charakterystyki
przekaźnika dwupołożeniowego z histerezą
konstruujemy schemat
zastępczy zawierający charakterystykę
przekaźnika idealnego i obwód sprzężenia zwrotnego jak na
rysunku
poniżej.
u
y
a
B
-a
-B
u
-B
B
y
a
B
–
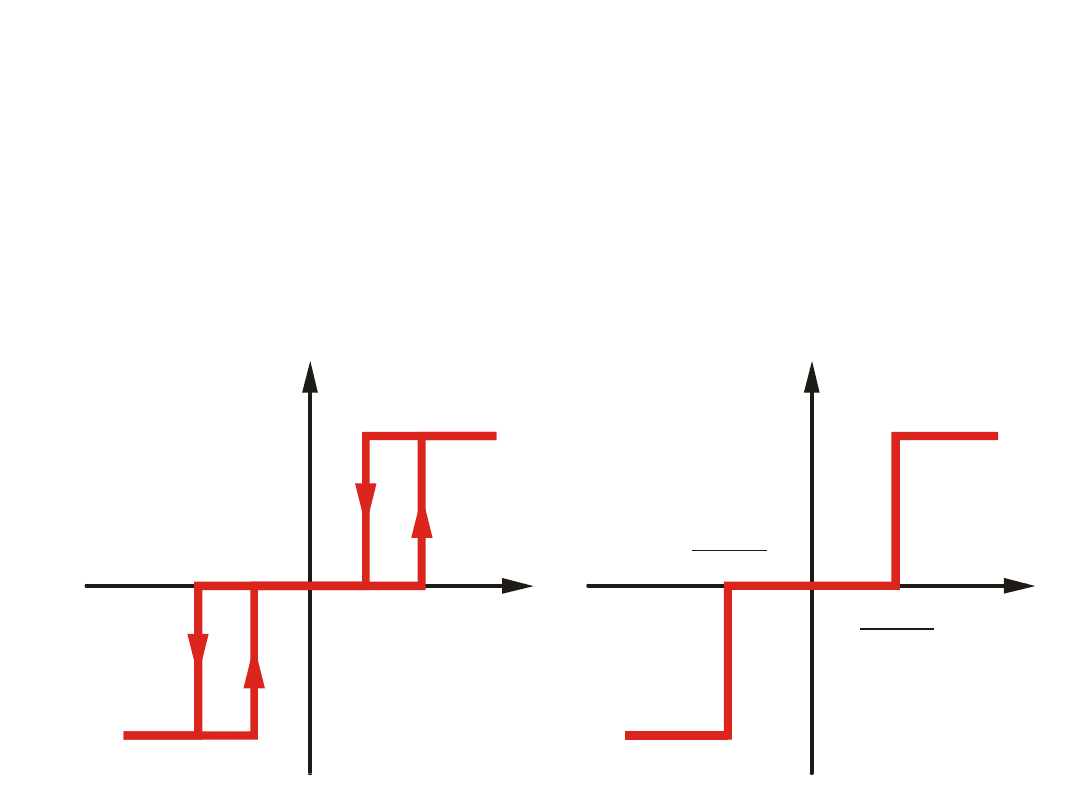
Wybrane schematy zastępcze członów
przekaźnikowych
Dana jest charakterystyka
przekaźnika trójpołożeniowego z
histerezą oraz charakterystyka przekaźnika idealnego
przechodząca przez środek pola histerezy.
u
y
a
1
a
2
B
-a
2
-a
1
-B
u
y
B
-B
–
+
2
a
a
1
2
a
a
1
2
+
2
Wybrane schematy zastępcze członów
przekaźnikowych
u
-B
B
y
a a
B
2
1
-
2
–
Schemat zastępczy przekaźnika trójpołożeniowego z
histerezą.

Przekształcanie schematów blokowych
Schematy blokowe
układów z członami nieliniowymi można
przekształcać podobnie jak schematy układów liniowych.
Obowiązuje przy tym warunek konieczny i dostateczny prze-
kształcenia:
Zastąpienie
części
schematu
układem
równoważnym nie może powodować zmian w
pozostałych częściach schematu nie podlegającym
przekształceniu.
Kolejność występowania członów nieliniowych
ma istotne znaczenie dla
właściwości układu i
nie wolno jej
zmieniać.
Stąd wynika podstawowa zasada przekształcania:

Przekształcanie schematów blokowych
Dopuszczalne
przekształcenia schematów blokowych:
1) szeregowe
połączenie członów,
2)
równoległe połączenie członów,
3) przenoszenie
węzła zaczepowego.
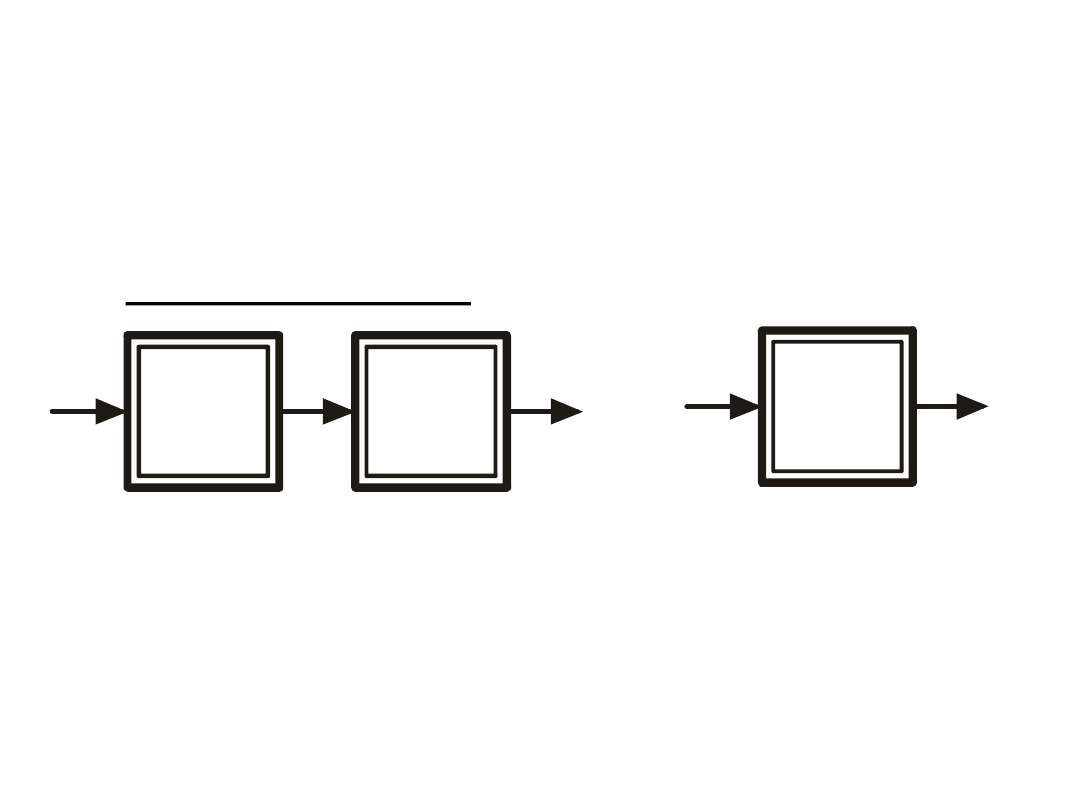
Przekształcanie schematów blokowych
Rozważamy fragment układu złożony z dwóch członów
nieliniowych o znanych charakterystykach statycznych
połączonych szeregowo:
Dwa człony nieliniowe połączone
szeregowo.
u
f u
1
( )
u
1
f u
2
1
( )
y
u
f u
( )
y
Człon zastępczy równoważny
układowi z rysunku obok.
Po podstawieniu charakterystyki pierwszego
członu do
charakterystyki drugiego
członu otrzymujemy
y = f
2
(u
1
) = f
2
[f
1
(u)] = f(u)
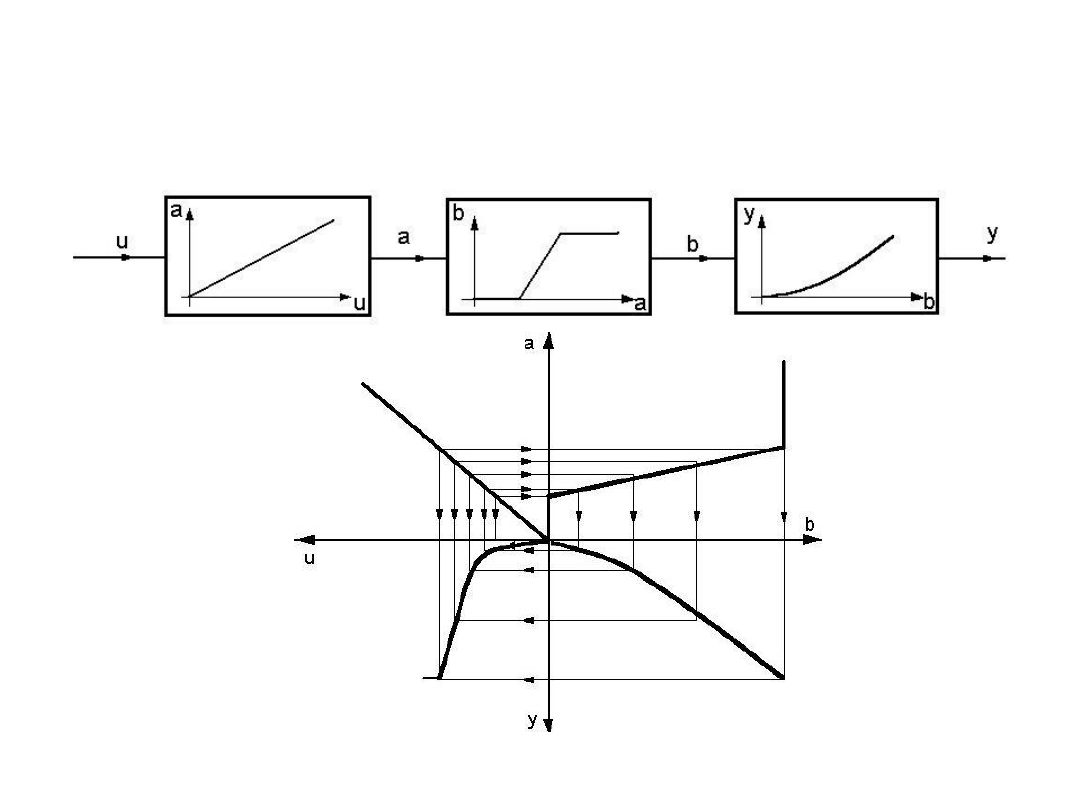
Graficzne wyznaczanie charakterystyki członu zastępczego
dla członów nieliniowych połączonych szeregowo
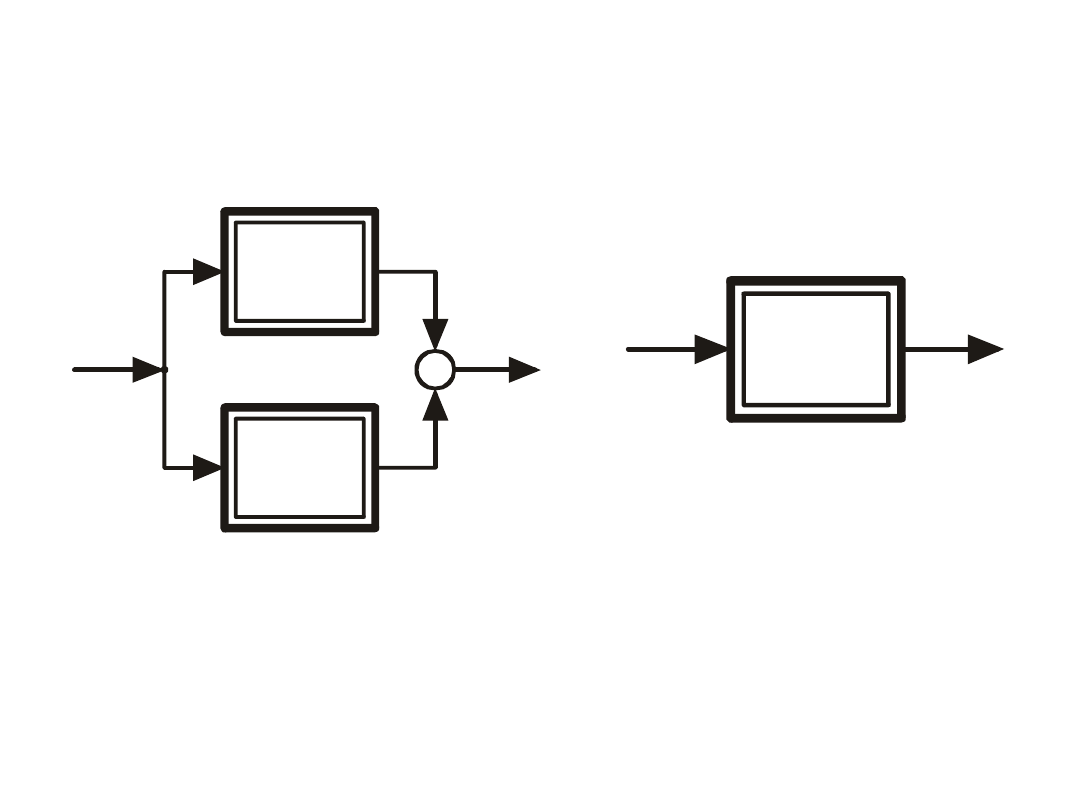
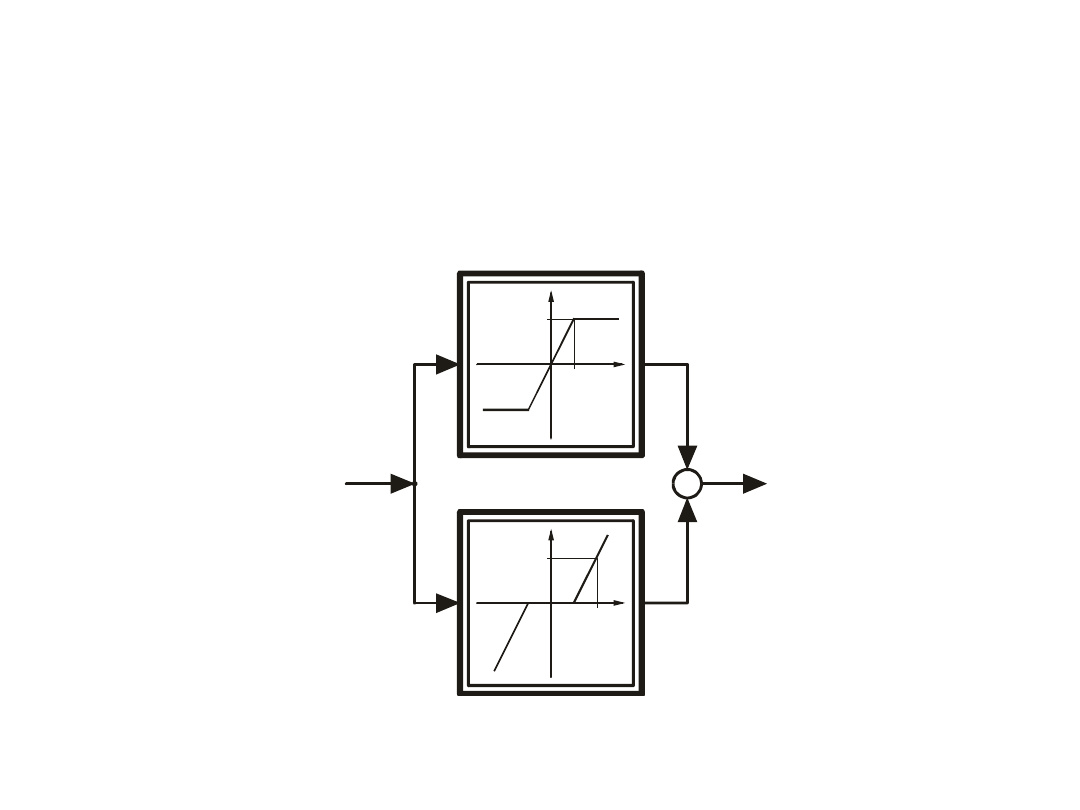
Przekształcanie schematów blokowych
Człon zastępczy równoważny
układowi ze schematu obok
Dwa człony nieliniowe połączone
równolegle
u
f u
1
( )
f u
2
( )
y
+
y
1
+
y
2
u
f u
( )
y
Równoległe połączenie członów
Z istoty
połączenia równoległego wynika, że charakterystyka członu
zastępczego jest równa sumie charakterystyk członów składowych
y = y
1
+ y
2
= f
1
(u) +
f
2
(u) = f(u)
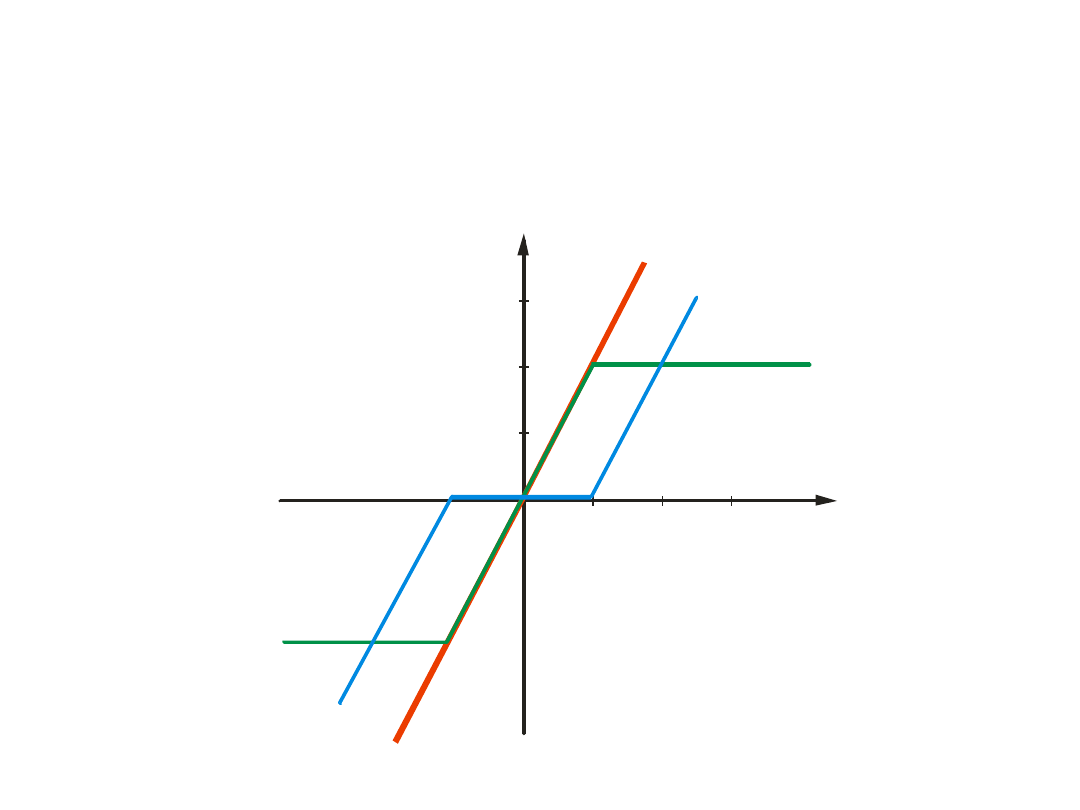
Graficzne wyznaczanie charakterystyki członu zastępczego
dla członów nieliniowych połączonych równolegle
u
y , y , y
1
2
y
f u
1
1
=
( )
y
f u
2
2
=
( )
y f u
=
( )
1
2
3
4
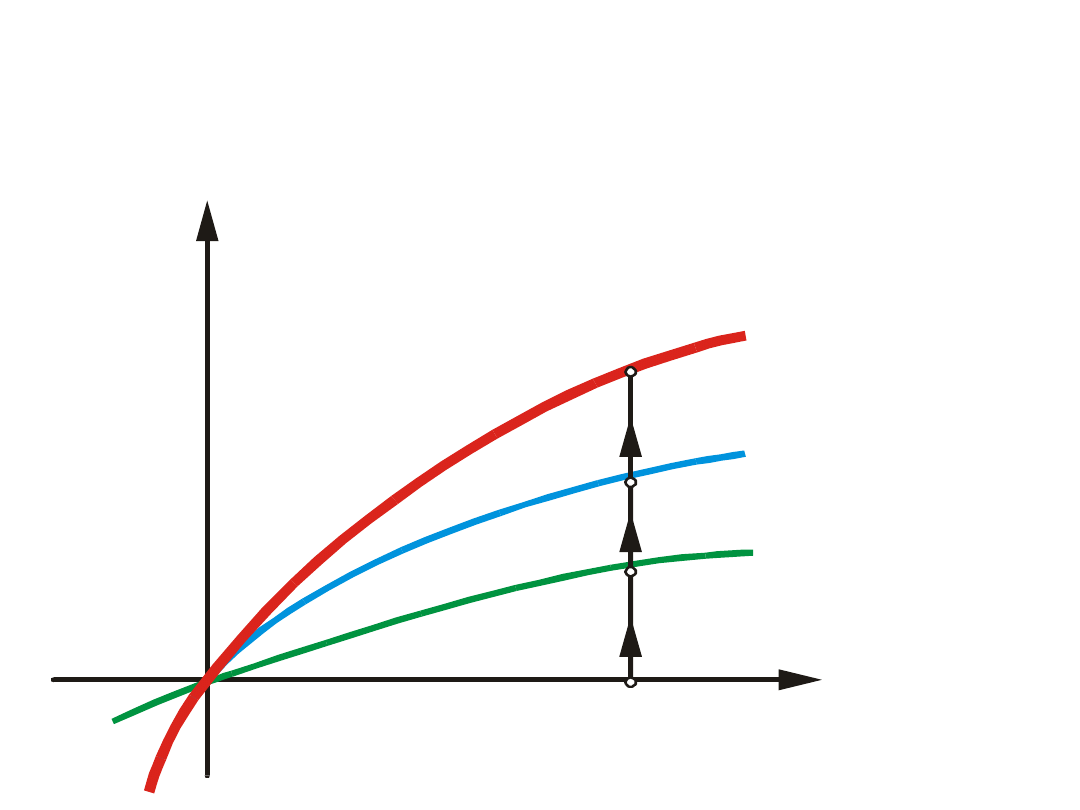
Przekształcanie schematów blokowych – przykład
Wyznaczyć charakterystykę członu zastępczego dla podanego niżej
równoległego połączenia członów o znanych charakterystykach
statycznych.
Dwa człony nieliniowe połączone równolegle
u
2
4
2
4
4
y
+
y
1
+
y
2
Przekształcanie schematów blokowych – przykład
Rozwiązaniem
jest
charakterystyka
pokazana na rysunku.
Charakterystyka
wypadkowa jest liniowa
lub
zbliżona do liniowej.
Charakterystyki dla podanych układów
u
0
2
4
6
y , y , y
1
2
2
4
6
y f u
=
( )
y f u
1
1
=
( )
y f u
2
2
=
( )
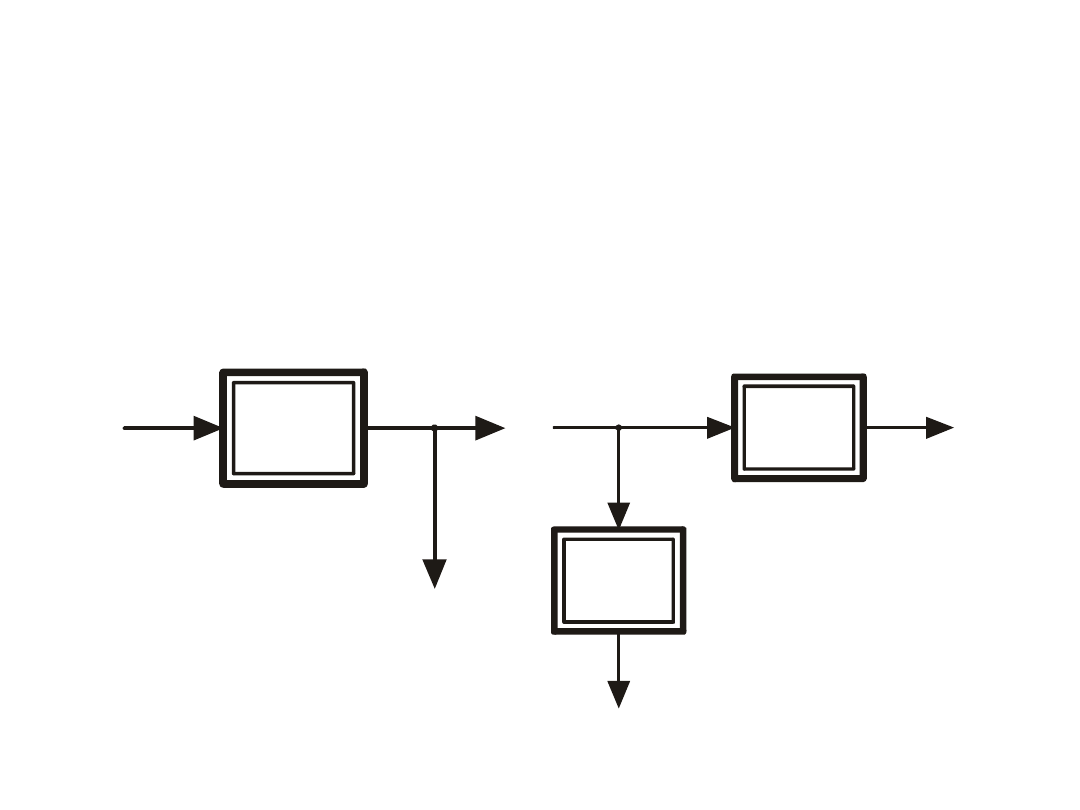
Przenoszenie węzła zaczepowego przed blok
Przeniesienie
węzła zaczepowego przed blok nieliniowy
zgodnie z warunkiem koniecznym i dostatecznym wymaga
wprowadzenia dodatkowego
członu nieliniowego takiego,
jak
człon dany. Otrzymamy wtedy schemat pokazany
poniżej na rysunku.
Przekształcony schemat
z rysunku obok
Schemat blokowy z węzłem
zaczepowym za blokiem
u
f u
( )
y
y
u
f u
( )
y
f u
( )
y
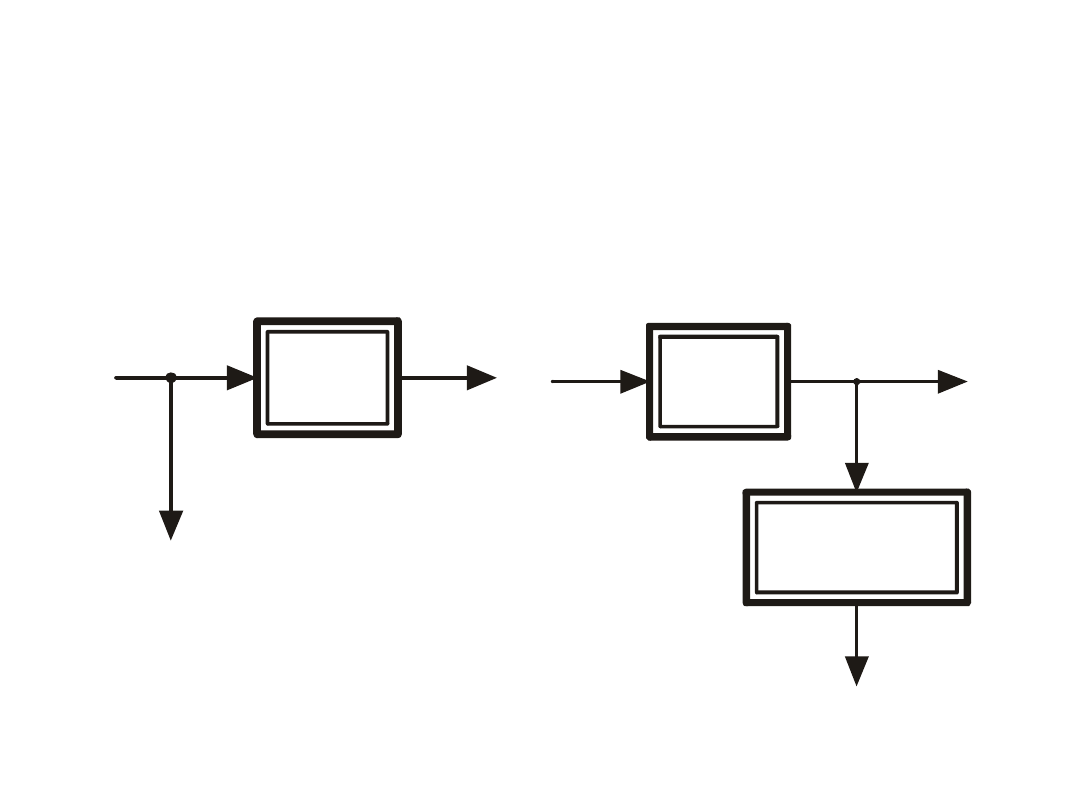
Przenoszenie węzła zaczepowego za blok
Przeniesienie
węzła zaczepowego za blok nieliniowy
zgodnie z warunkiem koniecznym i dostatecznym wymaga
wprowadzenia dodatkowego
członu nieliniowego o cha-
rakterystyce odwrotnej do charakterystyki danej.
Przekształcony schemat z
rysunku obok
Schemat blokowy z węzłem
zaczepowym przed blokiem
u
f u
( )
y
u
u
u
f u
( )
y
y
φ ( )
( )
y
f
u
=
-1
u

Układy regulacji przekaźnikowej
Przekaźnikowe
regulatory
nieciągłe,
dwupołożeniowe
i
trójpołożeniowe, tworzą nieliniowe układy regulacji.
Regulatory
dwupołożeniowe
są stosowane do obiektów o dużych
stałych czasowych, na przykład w układach regulacji ciśnienia,
poziomu i temperatury.
Do grupy
regulatorów nieciągłych należą również
regulatory
trójpołożeniowe
,
generujące trzy stany-wysoki, niski i zerowy,
które mogą odpowiadać obrotom silnika nawrotnego w lewo, w
prawo i zatrzymaniu.
Elementy
trójpołożeniowe objęte pętlą korekcyjnego ujemnego
sprzężenia zwrotnego i sterujące silnikami wykonawczymi,
nazywają się
regulatorami krokowymi
.
Regulacja dwupołożeniowa
W charakterze regulatora dwustawnego RD
występuje element mający charakterystykę
przekaźnikową -przekaźnik, stycznik, tyrystor.
RD
y
z
+
y (t)
-
e(t)
Obiekt
u(t)
u
e
e
1
e
2
L
H
Regulatory dwupołożeniowe stosuje się do stabilizacji:
• temperatury (
termostaty
), na przykład w podgrzewaczach paliwa,
• poziomu cieczy (
mombreje
), na przykład w zbiornikach
rozchodowych,
• ciśnienia (
presostaty
), na przykład w zbiornikach sprężonego
powietrza.
Sygnał wyjściowy regulatora dwupołożeniowego
przyjmuje dwa stany: L (low) i H (high).
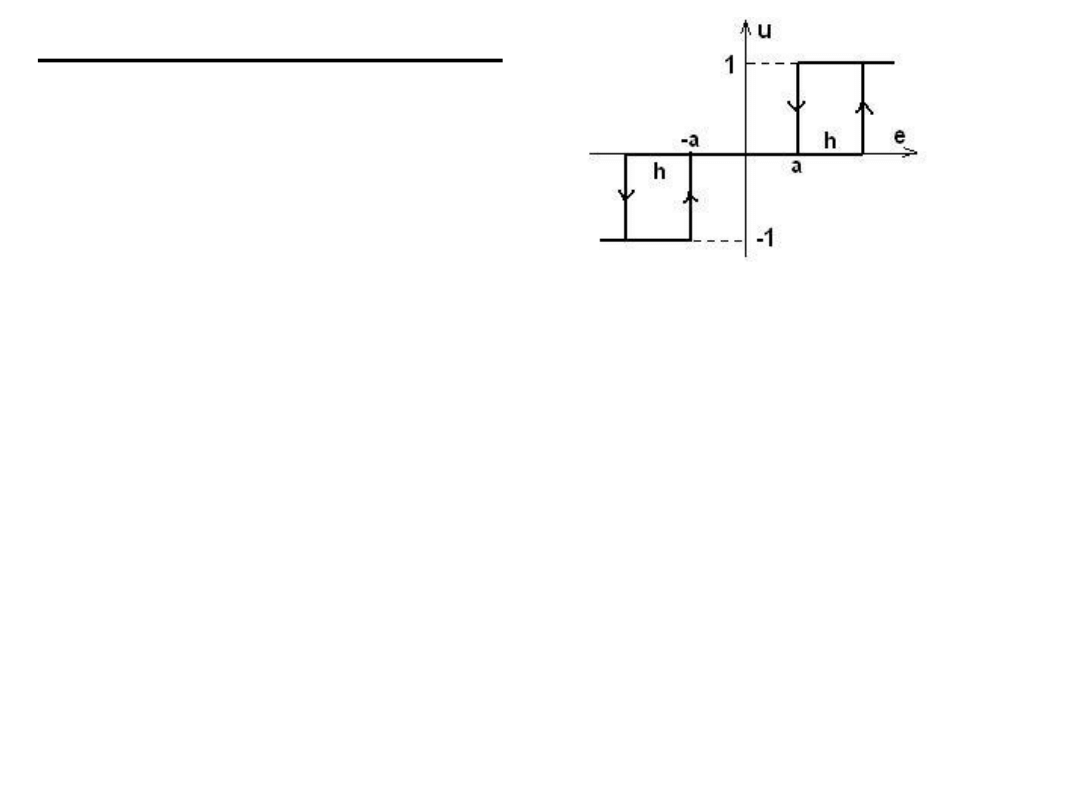
Regulacja trójpołożeniowa
W porównaniu z regulatorami dwupołożeniowymi dodatkowym
parametrem charakterystyki statycznej, oprócz strefy histerezy h,
jest strefa nieczułości a.
Istotne znaczenie regulatorów trójpołożeniowych wynika
z możliwości sterowania silnikami nawrotnymi - trzy stany na
wyjściu odpowiadają kierunkowi obrotów w prawo, w lewo oraz
stop.
Zastosowanie regulatora trójpołożeniowego bez dodatkowych
członów dynamicznych nie daje dobrych rezultatów.
Charakterystyka statyczna
regulatora trójpołożeniowego ma
trzy stany: -1, 0, 1
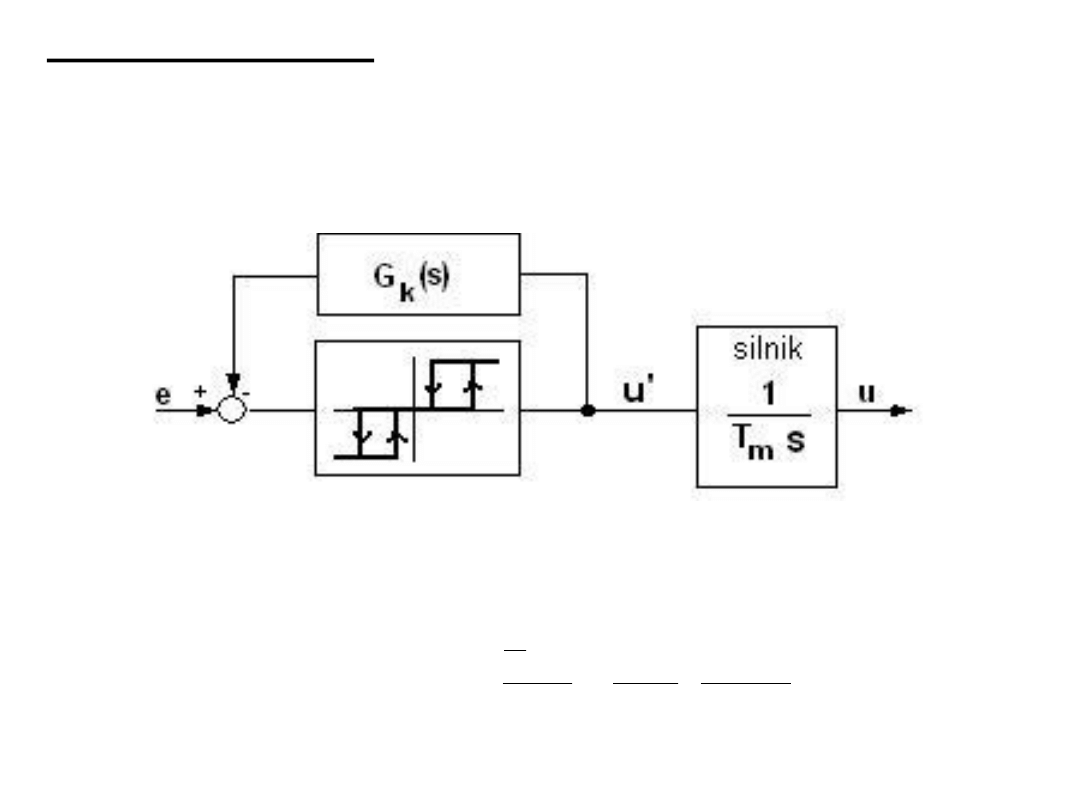
Regulacja krokowa
Przy powolnych zmianach e(t) oraz dla
uśrednionych wartości
można wyznaczyć transmitancję regulatora krokowego:
Regulator trójpołożeniowy zintegrowany z silnikiem wykonawczym
i
zaopatrzony w korekcję własności dynamicznych nazywa się
regulatorem krokowym:
)
s
(
G
1
sT
1
)
s
(
e
)
s
(
u
)
s
(
G
k
m
RK
Dla
regulator krokowy
ma własności regulatora PI:
Dla
regulator krokowy ma
własności regulatora PID:
1
s
T
k
(s)
G
i
k
i
m
i
RK
sT
1
1
kT
T
)
s
(
G
1
s
T
s
T
T
k
)
s
(
G
i
2
d
i
k
d
i
m
i
RK
sT
sT
1
1
kT
T
)
s
(
G
Nastawy
regulatorów krokowych PI i PID są prawie takie same
jak
regulatorów o wyjściu ciągłym, ponadto dobiera się
szerokość pętli histerezy h i strefy nieczułości a, w
następujący sposób:
-
szerokości strefy nieczułości a jest w przybliżeniu równa
maksymalnej
wartości uchybu ustalonego,
-
zwykle przyjmuje się h/a<0.5 ponieważ wzrost strefy
histerezy pogarsza stabilność układu,
Nastawy regulatorów krokowych
Przykłady regulatorów przekaźnikowych
stosowanych na statkach
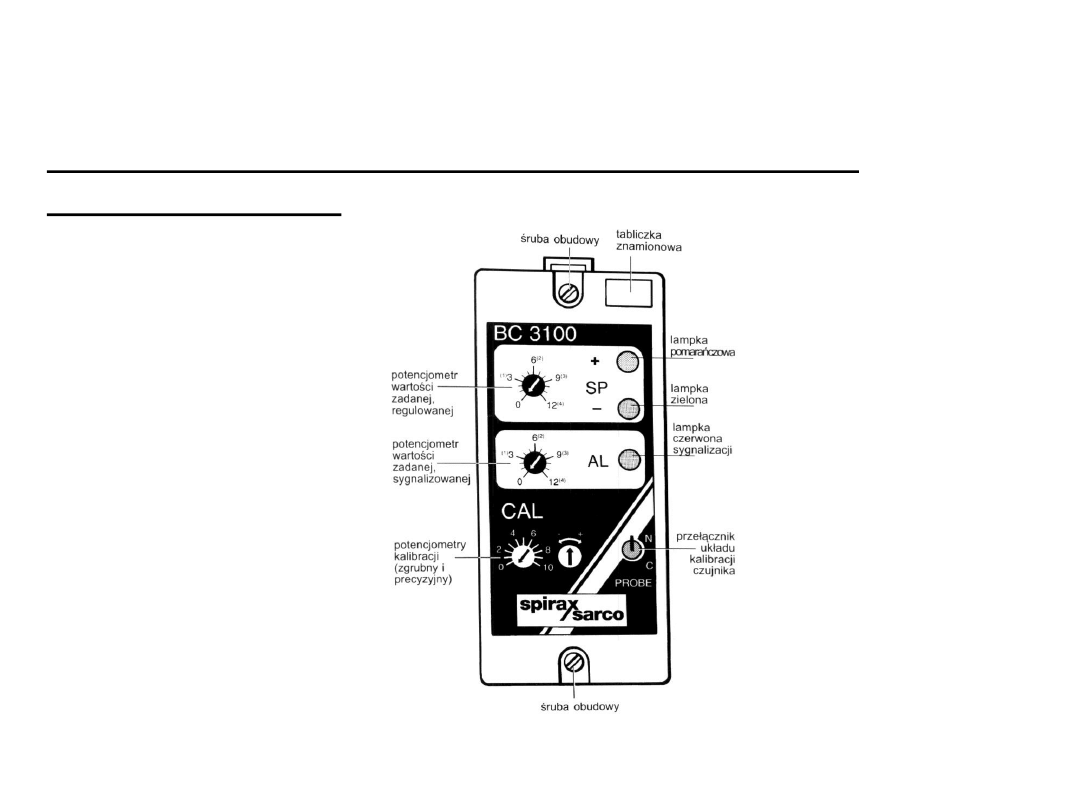
Regulator dwupołożeniowy przewodności BC 3100
firmy Spirax Sarco

Regulator przeznaczony jest do pracy w układach regulacji
i sygnalizacji zasolenia wody kotłowej, z wykorzystaniem
pomiaru przewodności.
Regulator wyposażony jest standardowo w nastawialne wyjście
sygnalizacyjne, a także analogowe 0(4)-20 mA, reprezentujące
wartość mierzoną przewodności w jednostkach odpowiadających
wybranemu zakresowi regulatora.
Regulator BC 3100 posiada sześć zakresów, wybieranych
wewnętrznym przełącznikiem, dostępnym po zdjęciu obudowy.
Regulator posiada również wejście przystosowane do podłączenia
oporowego czujnika temperatury PT 100, w celu ewentualnej
kompensacji temperaturowych zmian przewodności wody
w
warunkach zmieniającego się ciśnienia i temperatury.
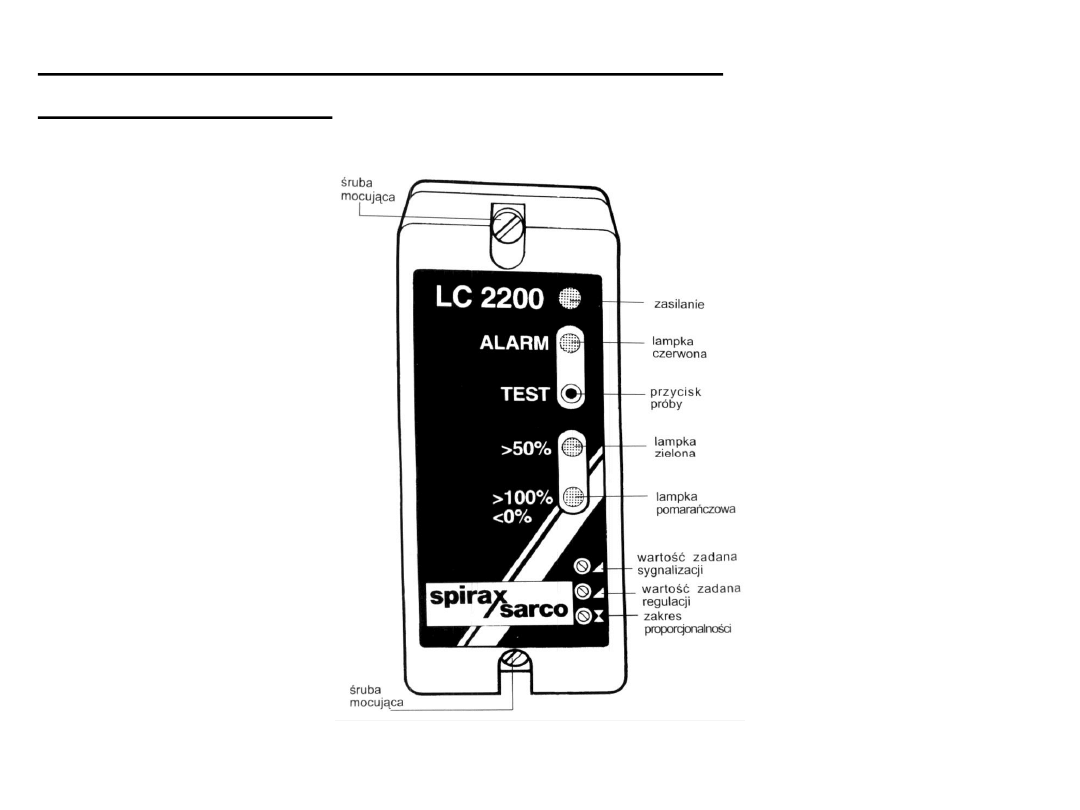
Regulator krokowy poziomu wody LC 2200
firmy Spirax Sarco
Regulator jest zalecany do współpracy z przetwornikiem
pojemnościowym poziomu w układach regulacji krokowej
poziomu wody w kotle, zbiorniku pod odgazowywaczem,
wodniarce, itp.
Można także wykorzystać sygnały pomiarowe z dowolnego
przetwornika ciśnienia, różnicy ciśnień lub temperatury.
Sygnał nastawiający regulatora jest dostosowany do współpracy z
siłownikiem elektrycznym, wyposażonym w nadajnik
potencjometryczny położenia zaworu.
Drugi kanał wyjściowy, także dwustanowy, służy do sygnalizacji
stanu krytycznego wielkości mierzonej. Wyjście sygnalizacyjne
wyposażone jest w filtr, umożliwiający sygnalizację stanów
poziomu na przykład burzliwie zachowującej się wody.
Regulator elektroniczny przekaźnikowy temperatury SX65
firmy Spirax Sarco

Regulator jest przeznaczony do stałowartościowej- ciągłej,
krokowej lub
dwupołożeniowej regulacji temperatury we
współpracy z czujnikiem oporowym Pt 100 i elementami
wykonawczymi, przyjmującymi sygnał analogowy, prądowy
4-
20 mA lub z przekaźnika (siłowniki elektryczne).
Możliwości regulatora:
• dwie przełączane zdalnie wartości zadane,
• regulacja według algorytmu PID z możliwością takiej
jego
modyfikacji, aby otrzymać algorytmy pochodne
-
regulację P lub dwupołożeniową,
• dwie programowalne sygnalizacje,
• blokada klawiatury elewacyjnej,
• ochrona przed przeregulowaniem,
• ogranicznik sygnału wyjściowego.

Dziękuję za uwagę.
Wyszukiwarka
Podobne podstrony:
temat9
Charakterystyki czasowe JG
JG RUST Patterns 9 15
Pi.gov klastry aktualnosci, Uniwersytet Ekonomiczny JG, Praca magisterska
ChOiN II JG wyklad 6
cala sciaga, Uniwersytet Ekonomiczny JG, Prognozowanie
Bilans i RZiS, Uniwersytet Ekonomiczny JG, Analiza ekonomiczna
jg rozciaganie
Akt zawierzenia młodzieży na JG 15[1].08.91r., Pomoce do katechezy
ChOiN I JG wyklad 6
jg rozciaganie
iGrafx okno instrukcja nowa 2013n JG
MozgUZ Temat9
jg bs 02 04
ChOiN I JG wyklad 5
07 MBII 2007 JG
ChOiN II JG wyklad 3
ChOiN I JG wyklad 2
mb, Uniwersytet Ekonomiczny JG, Marketing
więcej podobnych podstron