LABORATORIUM MASZYN
ELEKTRYCZNYCH
MASZYNY ASYNCHRONICZNE KLATKOWE
1. Wiadomości wstępne
Maszyny asynchroniczne, nazywane również
indukcyjnymi, są najczęściej stosowane jako silniki
zarówno trójfazowe, jak i jednofazowe.
Silniki asynchroniczne są najbardziej
rozpowszechnionym typem maszyn wirujących. Mają
one prostą budowę, są niezawodne oraz tanie w
produkcji.
Uwzględniając silniki jednofazowe stosowane w
gospodarce domowej oraz silniki dwufazowe
wykorzystywane w układach automatyki, a także
trójfazowe największej mocy można stwierdzić, że moc
ich sięga od kilku watów do kilku megawatów.
Silniki te buduje się na napięcia od 100 do
6000V.
Silnik asynchroniczny trójfazowy jest z
zasady zasilany od strony stojana. W
uzwojeniach wirnika, a w wirnikach masywnych
także w masie wirnika, indukują się w czasie
pracy silnika prądy wywołane ruchem pola
wirującego względem wirnika.
Stąd można stwierdzić, że wirnik silnika
asynchronicznego (indukcyjnego), niezależnie
od budowy, jest zasilany na drodze indukcji
elektromagnetycznej podobnie jak uzwojenie
wtórne w transformatorze.
2.Konstrukcja
Podstawowymi częściami maszyny asynchronicznej
są: nieruchomy stojan (stator) i obracający się w nim
wirnik (rotor).
Kadłub maszyny jest odlany z żeliwa albo spawany
ze stali. Nie stanowi on części czynnej maszyny oraz nie
przewodzi strumienia magnetycznego, lecz jest częścią
konstrukcyjną.
Ze względu na przemagnesowywanie rdzenia
statora i wirnika przez strumień wirujący w przestrzeni z
częstotliwością f
1
i f
2
, dla zmniejszenia strat w stali, rdzeń
stojana i wirnika wykonany jest w formie pakietów z
nakrzemionych blach grubości najczęściej około 0,5mm,
izolowanych od siebie przez jednostronne oklejenie
cienkim papierem albo przez powlekanie ich odpowiednim
lakierem izolacyjnym.
Pakiet blach stojana, odpowiednio sprasowany,
osadzony jest w kadłubie i umocowany albo przez
ściśnienie odpowiednimi pierścieniami dociskowymi,
albo za pomocą śrub.
W maszynach z wentylacją promieniową
blachy oddzielone są odpowiednimi kanałami
wentylacyjnymi. Jeżeli przewietrzenie odbywa się
wzdłuż osi, to w blachach stojana mogą znajdować
się osiowe kanały wentylacyjne.
Pomiędzy pakietem blach a kadłubem
najczęściej jest wolna przestrzeń zapewniająca
chłodzenie blach stojana od zewnątrz.
Dla lepszego chłodzenia kadłub stojana jest
użeberkowany. Żebra mogą być otulone osłoną dla
właściwego ukierunkowania strug chłodzącego
powietrza.
Blachy stojana i wirnika są odpowiednio
użłobkowane dla umieszczenia w nich uzwojeń. Od
kształtu żłobków uzależnione są właściwości
maszyny asynchronicznej.
Występują następujące kształty żłobków
wirników silników asynchronicznych:
a)zwykłe
b) głębokożłobkowe
c) dwuklatkowe
W stojanie stosowane są zazwyczaj żłobki
półzamknięte, zaś żłobki otwarte ze względu na
technologię produkcji uzwojenia tylko przy
wysokich napięciach.
Żłobki otwarte są dogodniejsze przy
układaniu uzwojenia, ale równocześnie powodują
one jak gdyby zwiększenie szczeliny
przywirnikowej, a więc zwiększenie prądu
magnesującego, czyli zmniejszenie współczynnika
mocy maszyny.
Często dla poprawienia warunków
rozruchowych stosuje się w wirniku uzwojenie
dwuklatkowe lub głębokożłobkowe.
O szerokości szczeliny powietrznej
oddzielającej stojan od wirnika decydują względy
mechaniczne. Chodzi o to, by wirnik nie dotykał
stojana, zwłaszcza przy ewentualnym ugięciu się
wału.
Szczelina powinna być możliwie wąska, by nie
zmniejszać przewodności magnetycznej
(permeancji).
Nawet w bardzo dużych maszynach szczelina
powietrzna nie przekracza na ogół wartości 2mm.
Uzwojenie stojana i wirnika w żłobkach
zabezpieczone są przed wypadnięciem klinami
wykonanymi z preszpanu, drewna lub podobnego
materiału.
Na stojanie zamieszczona jest tabliczka
zaciskowa, do której doprowadzone są końcówki
uzwojenia stojana.
Wirniki w maszynach asynchronicznych
wykonane są również z blach żłobkowanych,
chociaż bywają wirniki bezżłobkowe.
Wirniki składają się w tym przypadku z
materiałów o różnych właściwościach
elektrycznych.
W uzwojeniu klatkowym w żłobki wkłada się
gołe pręty z aluminium, miedzi lub mosiądzu, które
za pomocą lutowania lub spawania połączone są
na obu członach wirnika pierścieniami z takiego na
ogół materiału, jak pręty.
Zamiast wkładać pręty do żłobków, żłobki
można wylać z aluminium.
Takie wirniki nazywamy klatkowymi
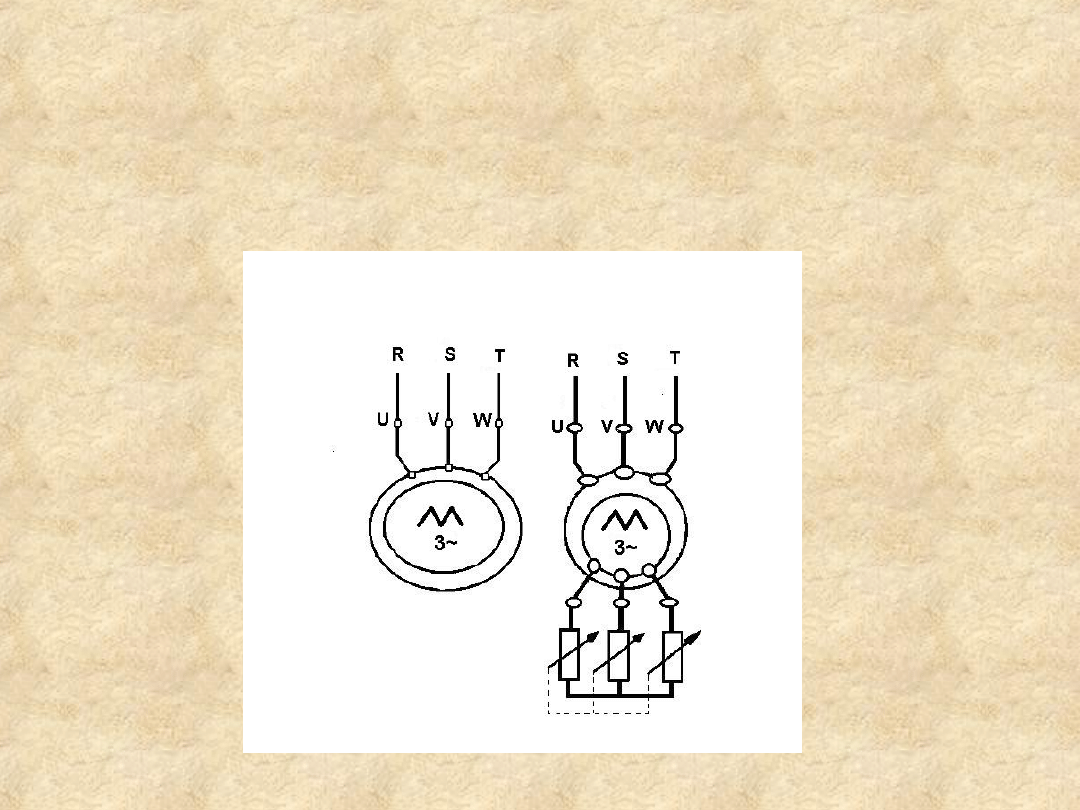
Symbole silników asynchronicznych stosowane
na schematach przedstawia poniższy rysunek
3.Uzwojenia maszyn asynchronicznych
Uzwojenia maszyn asynchronicznych są
uzwojeniami otwartymi (każda faza posiada
początek i koniec).
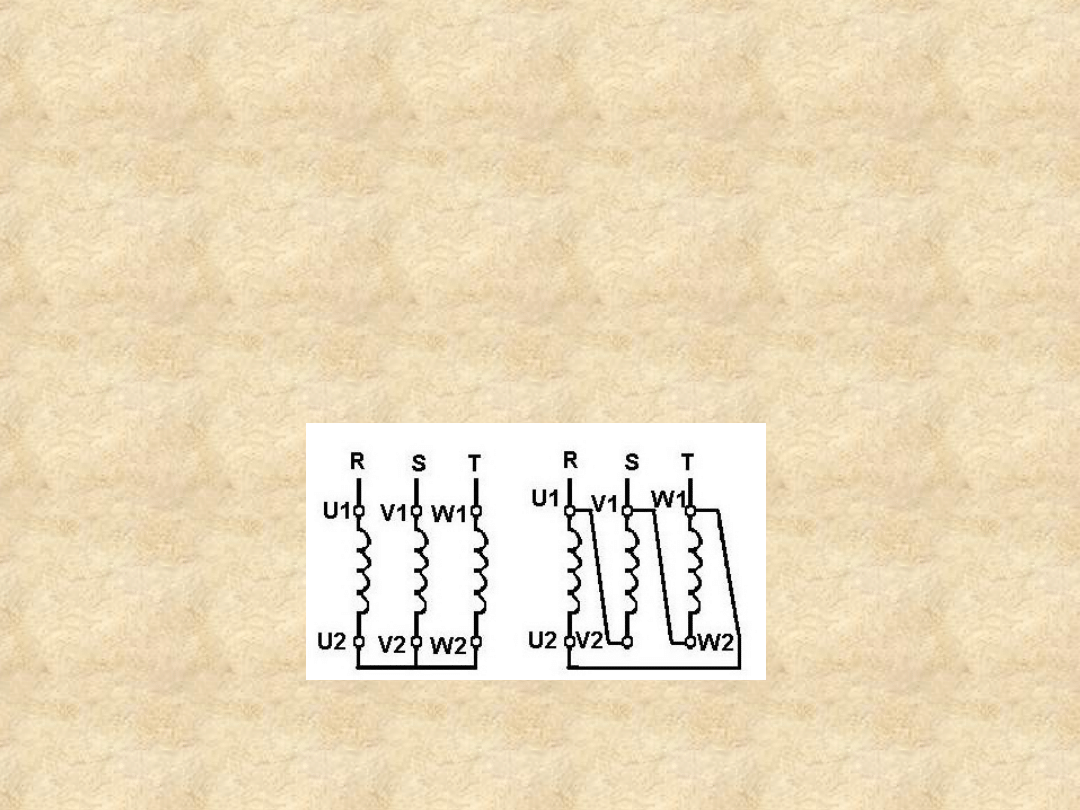
Uzwojenia trójfazowe stojana można łączyć
w trójkąt lub w gwiazdę (rys.4.4).
Aby ułatwić łączenie uzwojenia w trójkąt,
końce uzwojeń poszczególnych faz na tabliczce
nie znajdują się pod początkami tych samych
uzwojeń (np. zacisk U2 znajduje się pod
zaciskiem W1, a nie pod zaciskiem U1).
Odrębną grupę uzwojeń stanowią
uzwojenia wirników silników klatkowych.
Poniżej zestawiono rodzaje uzwojeń
stosowanych w trójfazowych silnikach
asynchronicznych.
1.Uzwojenie stojana
1.1.Jednowarstwowe
1.1.1. Piętrowe
1.1.1.1.Dwupiętrowe
1.1.1.2.Dwupiętrowe z grupą łamaną
1.1.1.3.Trójpiętrowe
1.1.2. Wzornikowe
1.1.2.1.Grupowe
1.1.2.2.O jednakowych zezwojach
1.1.2.3.Koszykowe
1.2.Dwuwarstwowe
1.2.1. Pętlicowe
1.2.2. Faliste
1.Uzwojenia wirnika
1.1.Pierścieniowe
1.1.1.Drutowe
1.1.2.Prętowe
1.2.Klatkowe
1.2.1. Jednoklatkowe
1.2.2. Dwuklatkowe
1.1.3.Głęboko-żłobkowe
Przed przystąpieniem do wykonania
uzwojenia należy określić parametry
uzwojenia. Istotnymi parametrami uzwojeń
są:
Ż - liczba żłobków na obwodzie rdzenia
2p - liczba biegunów
m - liczba faz
τ- podziałka biegunowa;
Określana jest ona (τ) jako odległość
między dwoma sąsiednimi biegunami,
mierzona po obwodzie wewnętrznym
stojana.
Podziałkę biegunową określa się według zależności:
p
i
D
2
gdzie:
D
i
-wewnętrzna średnica stojana.
Podziałkę biegunową można określić także liczbą
żłobków przypadającą na jeden biegun:
p
Ż
2
gdzie:
q - liczba żłobków na biegun i fazę; oznacza ona ile
żłobków jest zajętych przez uzwojenie danej fazy na
przestrzeni jednej podziałki biegunowej.

Po podsumowaniu można stwierdzić, że:
w uzwojeniach jednowarstwowych z q
całkowitym i grupami niedzielonymi liczba
grup na fazę równa się liczbie par biegunów
G = p,
w uzwojeniach dwuwarstwowych z q
całkowitym oraz w uzwojeniach
jednowarstwowych z grupami liczba grup na
fazę równa się liczbie biegunów G = 2p.
W rzeczywistości, w celu otrzymania rozkładu
indukcji w szczelinie zbliżonego do rozkładu
sinusoidalnego, każde uzwojenia fazowe dzieli się
na grupy cewek umieszczonych w sąsiednich
żłobkach.
Typowym uzwojeniem dwuwarstwowym
stojanów silników trójfazowych jest uzwojenie
pętlicowe, którego zwoje mogą być zarówno
jednozwojne, jak i wielozwojne.
4. Zasada działania silnika asynchronicznego
P o doprowadzeniu symetrycznego napięcia trójfazowego
do stojana, w nieruchomym początkowo powstaje pole
wirujące, wzbudzone symetrycznymi prądami trójfazowymi.
P ole wirujące, przy stałej częstotliwości prądów
zasilających, ma stałą prędkość synchroniczną określoną
zależnością:
min
/
60
/
2
obr
p
f
s
n
s
rad
p
f
s
Rozpatrzmy fizyczny silnika dwubiegunowego, w którym
pole wirujące obraca się w lewo, a wirnik klatkowy jest
początkowo nieruchomy.
W prętach wirnika na wskutek ruchu pola
magnetycznego względem wirnika wytworzy się siła
elektromotoryczna E
2
o częstotliwości napięcia zasilającego.
Przy zamkniętym obwodzie wirnika klatkowego popłynie
prąd I
2
, którego kierunek określamy regułą prawej dłoni, a
wartość zależnością:
2
2
2 Z
E
I
gdzie:
Z
2
- impedancją obwodu wirnika.
Prądy płynące w uzwojeniu stojana
tworzą pole magnetyczne wirujące.
Pole to przekracza uzwojenie wirnika i
wywołuj w tych uzwojeniach, zgodnie z
prawem Faradaja, siły elektromotoryczne.
Pod wpływem siły elektromotorycznej w
wirniku płynie prąd i wraz z polem wirującym
tworzą moment elektromagnetyczny.
Pod wpływem tego momentu silnik
wiruje.
P o d s ta w o w ym w a ru n k ie m p ra c y m a s z yn y
a s yn c h ro n ic z n e j je s t ró ż n ic a p rę d k o ś c i k ą to w yc h w iro w a n ia
p o la i w irn ik a .
P a ra m e tre m , k tó ry o k re ś la tą ró ż n ic ę n a z yw a s ię
p o ś liz gie m „s ”.
1
1
1
1
n
n
n
s
[ra d /s e k ] [o b r/m in ]
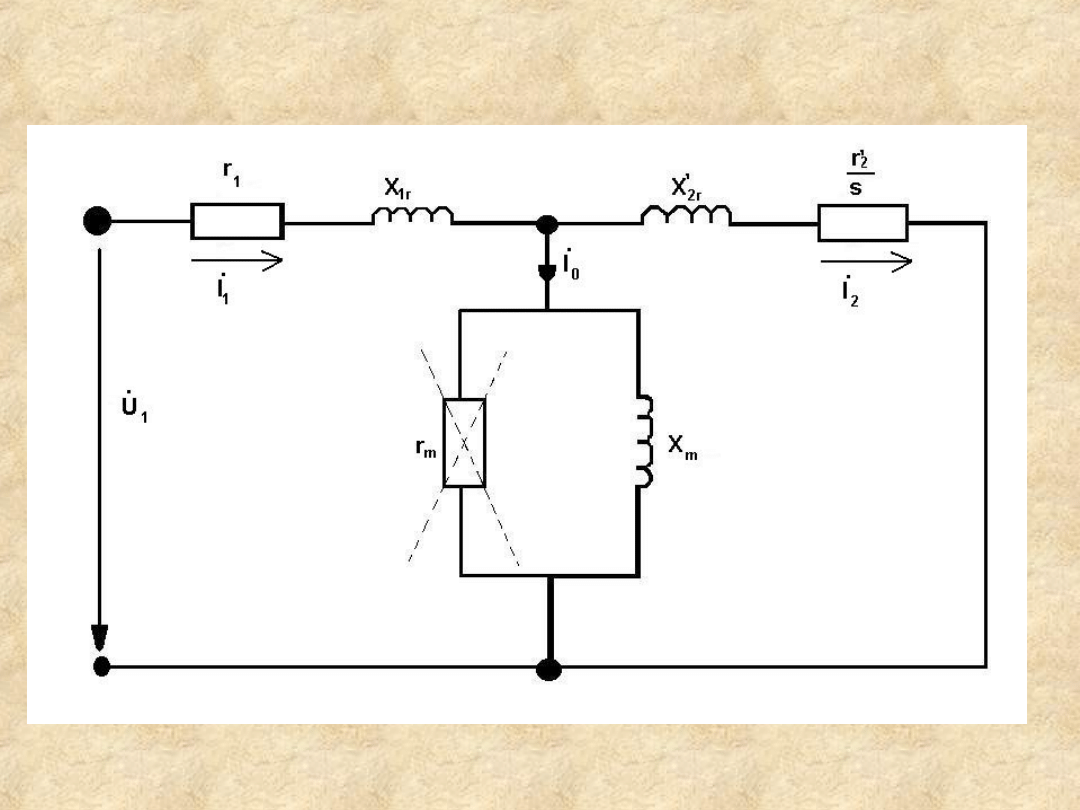
Schemat zastępczy układu pomiarowego
1
1
1
1
1
1
E
I
jx
I
r
U
r
1
U
– napięcie zasilające
r
1
– rezystancja uzwojenia stojana
x
1
– reaktancja rozproszenia stojana
x
1r
=
1
L
1r
w
=
1
-=s
1
2
2
2
2
2
2
2
2
2
2
2
I
jx
I
s
r
E
s
E
E
L
j
I
r
E
r
s
r
w
s
2
E
- siła elektromotoryczna przy nieruchomym wirniku
r
2
- rezystancja uzwojenia wirnika
x
r2
– reaktancja rozproszenia nieruchomego wirnika
x
r2
=
1
L
r2
przekładnia mas zyny as ync hronic znej
n
z
z
E
E
2
1
2
1
2
2
2
0
1
'
'
nI
I
I
I
I
2
0
1
2
2
2
2
1
'
'
'
'
I
I
I
I
jx
I
s
r
E
r
r
2
’
=n
2
r
2
x
2r
’
=n
2
x
2r
W m a s z y n ie a s y n c h ro n ic z n e j s tra ty w rd z e n iu
p ra w ie r ó w n a ją s ię z e ro , d la te g o ż e s tru m ie ń
m a g n e ty c z n y p r z e k ra c z a s z c z e lin ę .
P rą d m a g n e s o w a n ia I
0
je s t d o ś ć m a ły i d la te g o
I
1
I
2
’.
s
s
r
r
s
r
1'
2
'
2
'
2
Moc, która jest na rezystancji
s
s
r
1
'
2
jest mocą mechaniczną silnika asynchronicznego.
W tym schemacie zastępczym wszystkie elementy
mają sens fizyczny
r
1
- rezystancja wewnętrzna stojana
x
1r
- reaktancja rozproszenia uzwojenia stojana
x
m
- reaktancja namagnesowania
x
2r
’ - reaktancja rozproszenia uzwojenia wirnika
r
2
’ - rezystancja wirnika
Wszystkie elementy układu zastępcze
mogą być obliczone z wykorzystaniem danych
z poradnika i mogą być określone na maszynie
rzeczywistej z wykorzystaniem metod zwarcia i
biegu jałowego.
Schemat zastępczy jest podstawą do
obliczenia wszystkich charakterystyk silnika
asynchronicznego.
DIAGRAMY ENERGETYCZNE
P
1
- moc elektryczna w sieci
P
1
- straty
P
ee
- moc elektromagnetyczna, która jest
przekazywana ze stojana do wirnika za pomocą
pola magnetycznego
P
2
- straty w wirniku
P
2
- moc mechaniczna
2
'
2
1
2
'
2
1
1
'
2
2
1
'
2
1
1
1
1
'
2
1
'
2
2
'
2
3
2
r
x
r
x
s
r
r
U
I
r
x
r
x
j
s
r
r
u
z
u
I
I
s
s
r
I
P
1
2
2
'
2
'
2
3
2
2
1
1
3
1
cos
1
1
3
1
M
ee
P
M
P
I
r
P
I
r
P
I
U
P
Podstawową charakterystyką maszyny
elektrycznej jest zależność maszyny na wale
od poślizgu s.
2
'
2r
x
1r
x
2
s
'
2
r
1
r
1
ω
s
'
2
r
2
1
3U
M
podstawowa charakterystyka maszyny
asynchronicznej
J eżeli s>0, to
1>=
maszyna pracuje jako silnik
J eżeli s<0, to >
1
, to maszyna pracuje jako prądnica.
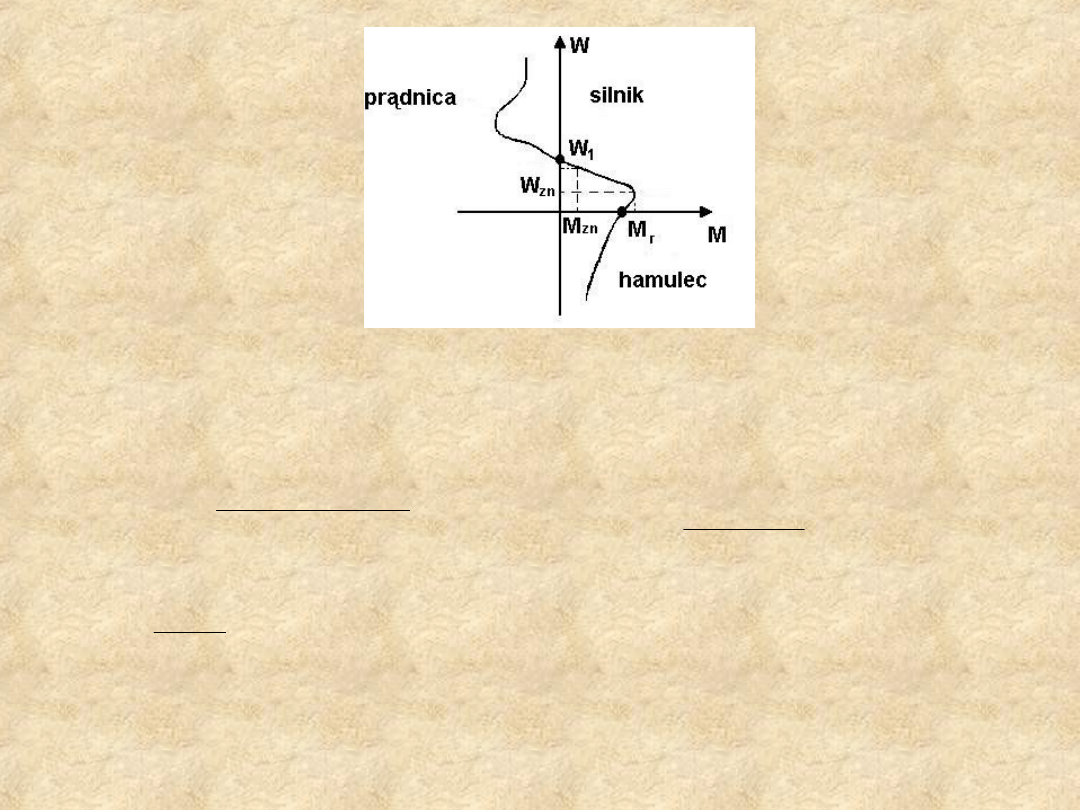
Ze wzrostem momentu na wirniku spada
prędkość
P
f
r
x
r
x
U
M
1
2
1
'
2
1
1
2
2
1
max
'
2
1
2
r
x
r
x
r
kr
S
f
1
– częstotliwość sieci
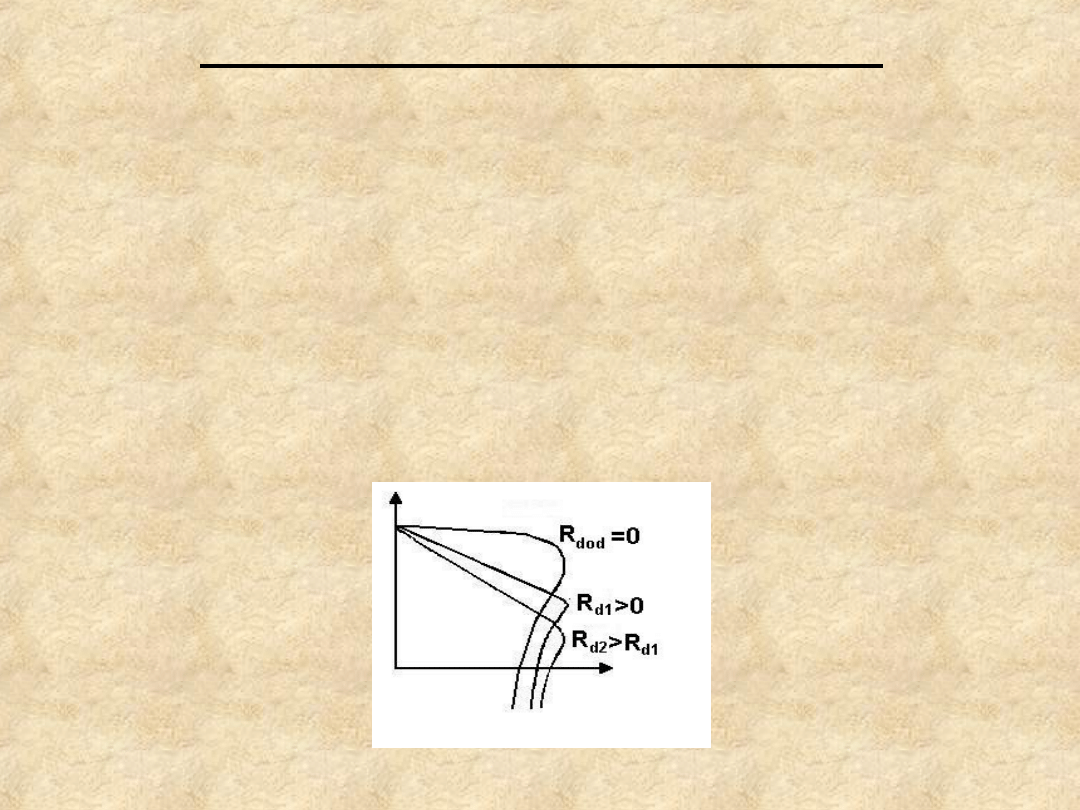
CECHY MASZYNY ASYNCHRONICZNEJ
1. Moment maksymalny nie zależy od
rezystancji wirnika tylko zależy od
napięcia
2. Poślizg krytyczny zależy od
rezystancji wirnika
Dla maszyny pierścieniowej można
podłączyć do sieci rezystancję dodatkową i
otrzymać rodzimą charakterystykę.
BADANIE TRÓJFAZWEJ MASZYNY
ASYNCHRONICZNEJ KLATKOWEJ
1. CEL PRACY
Badanie trójfazowej maszyny
asynchronicznej klatkowej
2. TREŚĆ PRACY
Zdjęcie charakterystyk mechanicznych
maszyny w układzie silnika i generatora.
Zdjęcie charakterystyk roboczych w układzie
silnika.
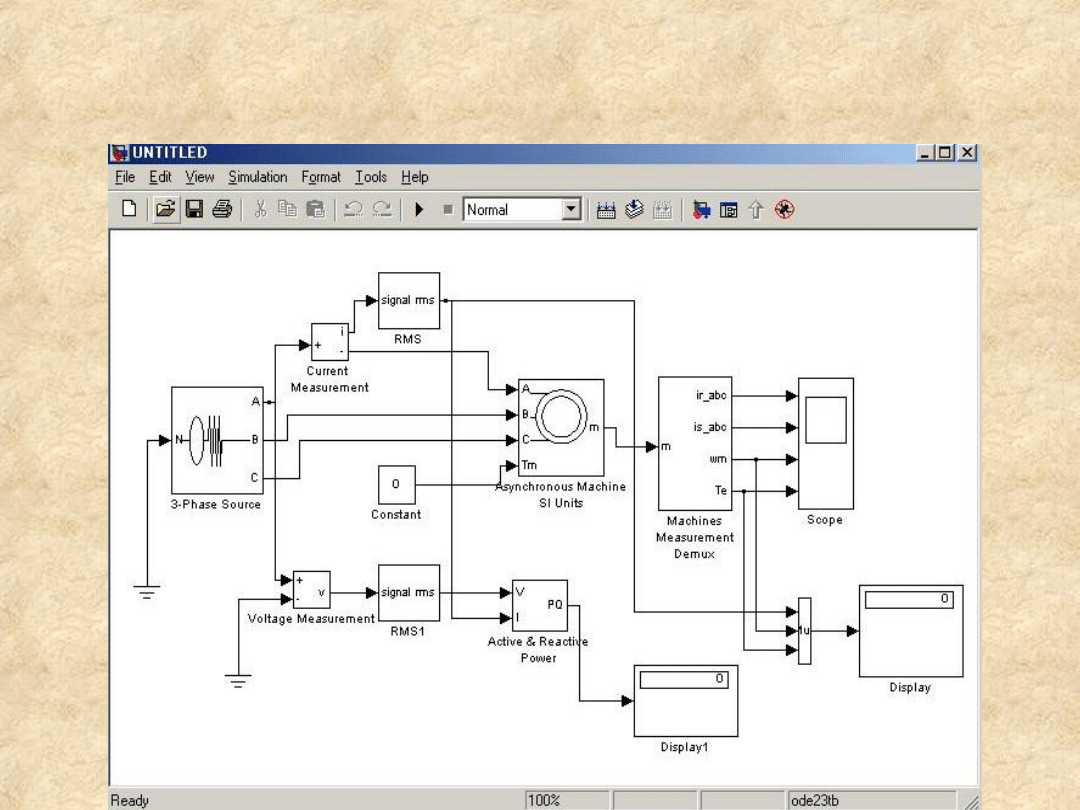
3. OPISANIE WIRTUALNEGO UKŁADU POMIAROWEGO
Sposób tworzenia schematu pomiarowego w
„Matlabie”
Układ ten składa się z:
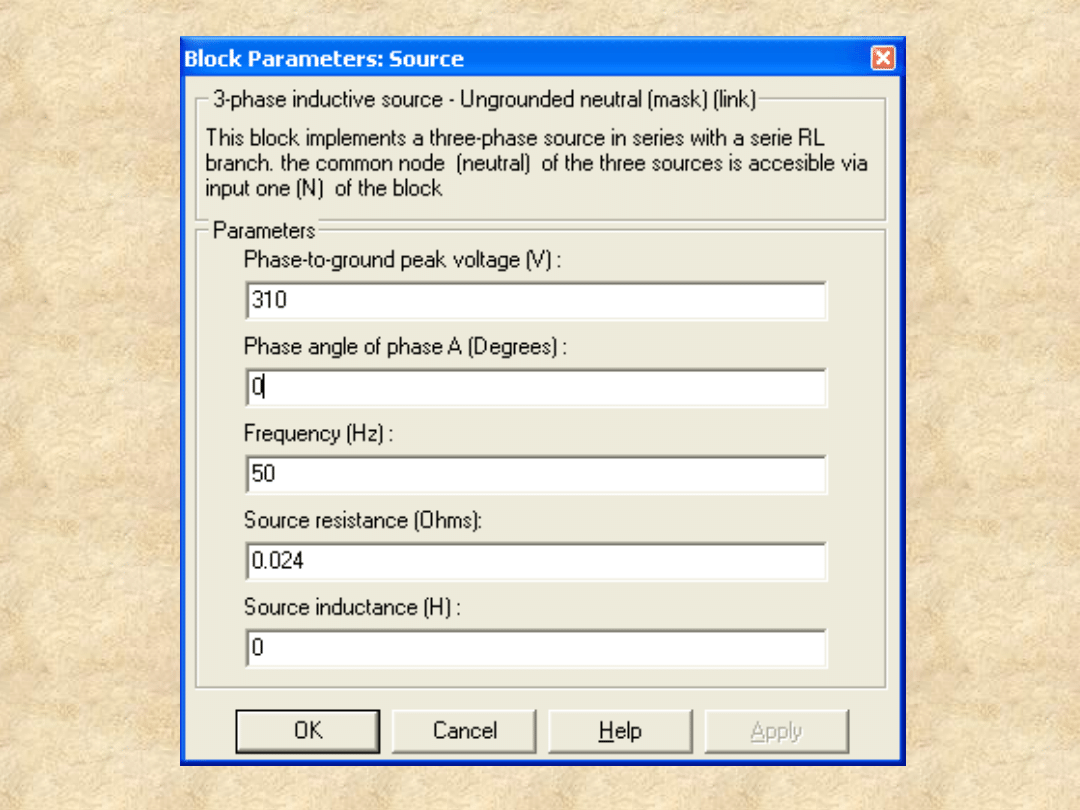
•Źródła trójfazowego napięcia przemiennego
Source z biblioteki Power System Blockset
/Extras/ Electrical Sources
•Miernik trójfazowego napięcia i prądu Three-
Phase V-I Measurement z biblioteki Power
System Blockset /Extras/ Measurement
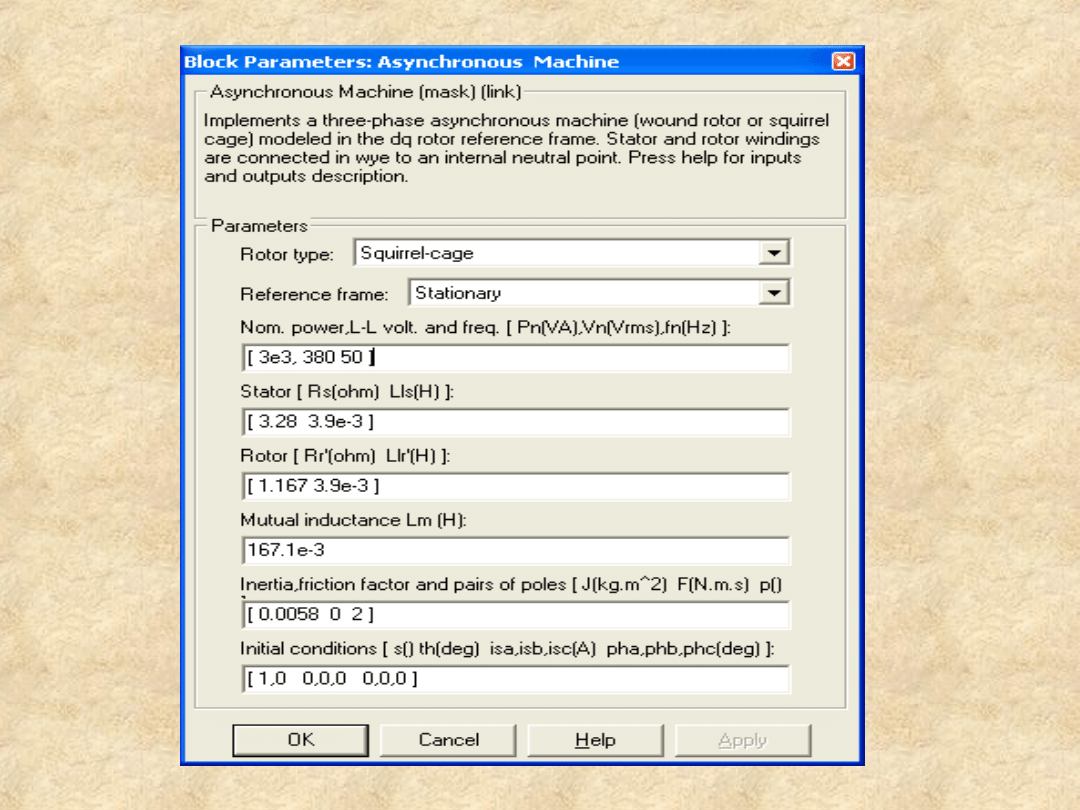
•Badanej trójfazowej maszyny
asynchronicznej Asynhronus Machine z
biblioteki Power System Blockset /Extras/
Machines
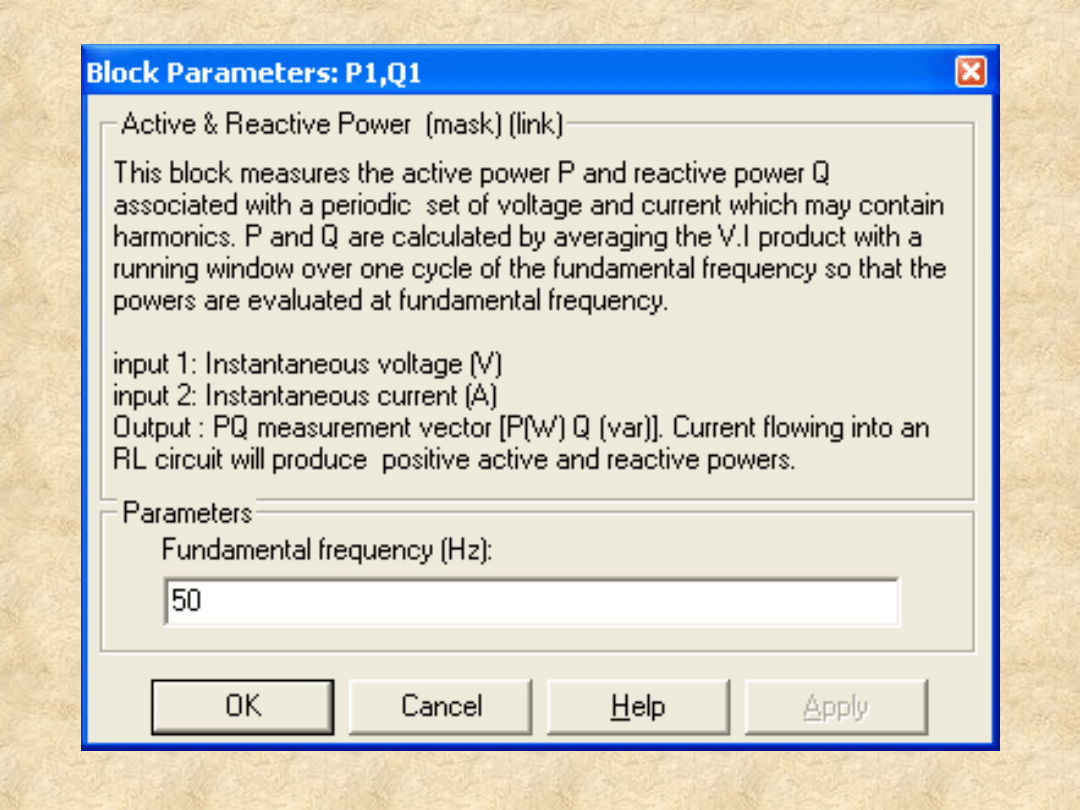
•Miernika mocy czynnej i biernej P1, Q1 z
biblioteki Power System Blockset /Extras/
Measurement
•Bloku Display do liczbowego przedstawienia
mierzonych mocy i bloku Scope do śledzenia
prądów wirnika i stojana, a także prędkości i
momentu maszyny asynchronicznej z
biblioteki głównej Simulink/ Sinks
•Bloku Moment do zadania momentu
mechanicznego na wale maszyny z biblioteki
głównej Simulink / Source
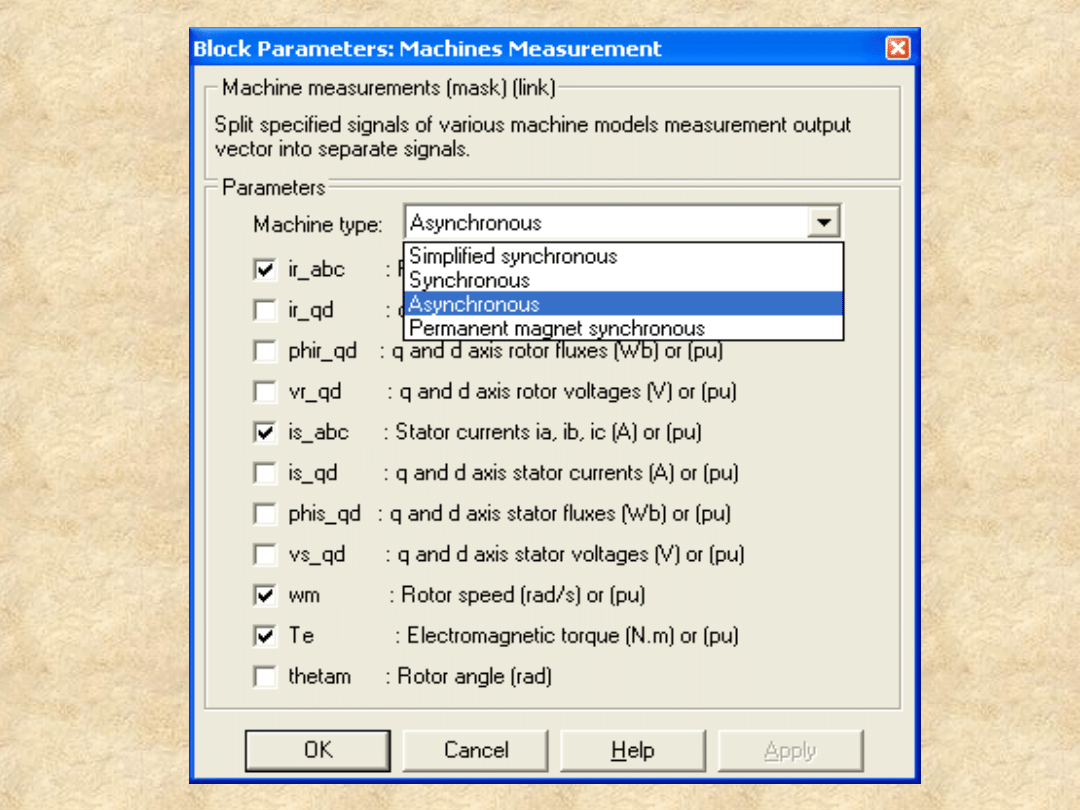
•Bloku Machines Measurement biblioteki Power
System Blockset /Machines
•Bloku Display1 do liczbowego przedstawienia
zmierzonego momentu elektromagnetycznego
[Nm] i prędkości [rad/s] maszyny głównej z
biblioteki Simulink / Sinks
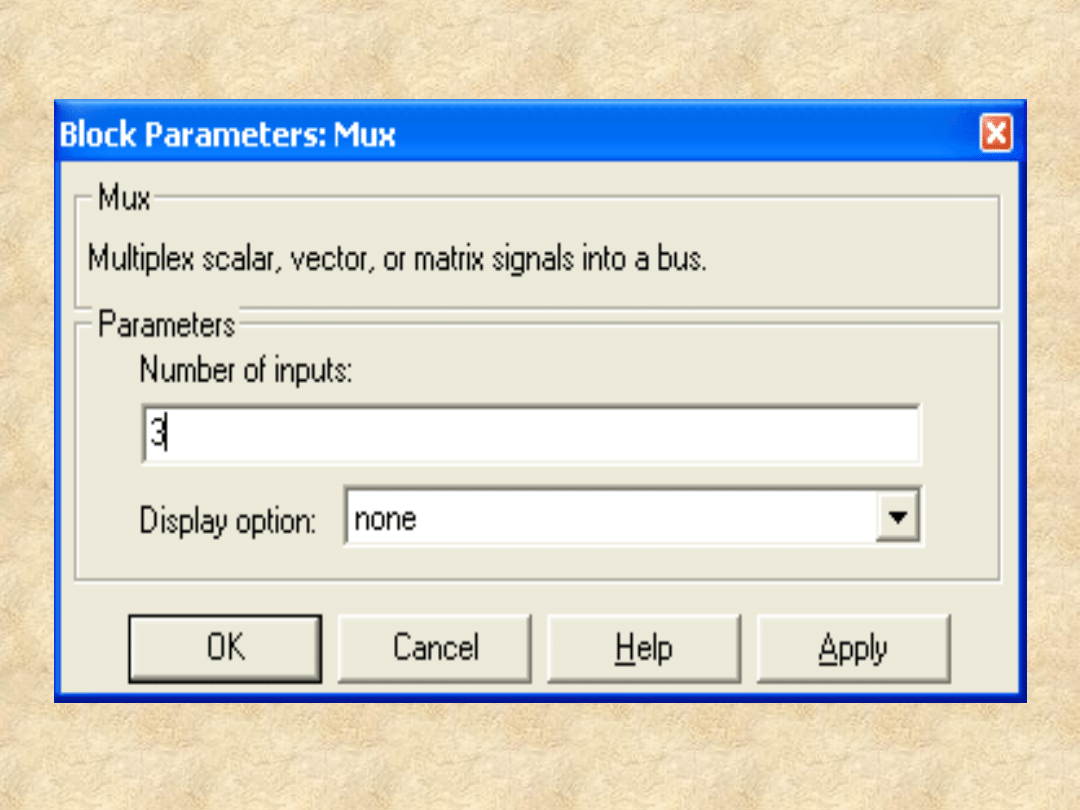
•Bloku Mux, przekształcający trzy sygnały w
jeden wektorowy, z głównej biblioteki Simulink /
Sinks
W polach okna zadaje się kolejno
następujące parametry:
•Typ wirnika (Rotor Type ), za pomocą tego pola
można zadać krótkozwarty lub fazowy wirnik
•System obliczeń przy analizie (Reference
frame)
•Moc, nominalne napięcie sieciowe i
częstotliwość
•Parametry schematu zastępczego stojana
•Parametry schematu zastępczego wirnika
•Parametry gałęzi namagnesowania
•Moment bezwładności, współczynnik tarcia
lepkiego, liczba par biegunów
•Początkowe warunki modelowania ( poślizg,
położenie wirnika, prądy stojana i fazy
początkowe )
Nominalne napięcie sieciowe dla wszystkich
maszyn wynosi 380 V.
Za pomocą pola Machine type można zadać
typ maszyny, chorągiewkami można wybrać
zmienne do pomiaru.
W polach okna nastawy parametrów pomiaru
znajduje się:
Amplituda napięcia fazowego źródła [V]
Początkowa faza [
]
Częstotliwość [Hz]
Rezystancja wewnętrzna [] i induktywność
źródła [G]
Napięcie i częstotliwość źródła powinny
odpowiadać parametrom maszyn
asynchronicznych.
Okno nastawy bloku pomiarowego mocy.
W tym oknie zadaje się tylko jeden parametr
– częstotliwość, która powinna być równa
częstotliwości źródła zasilania.
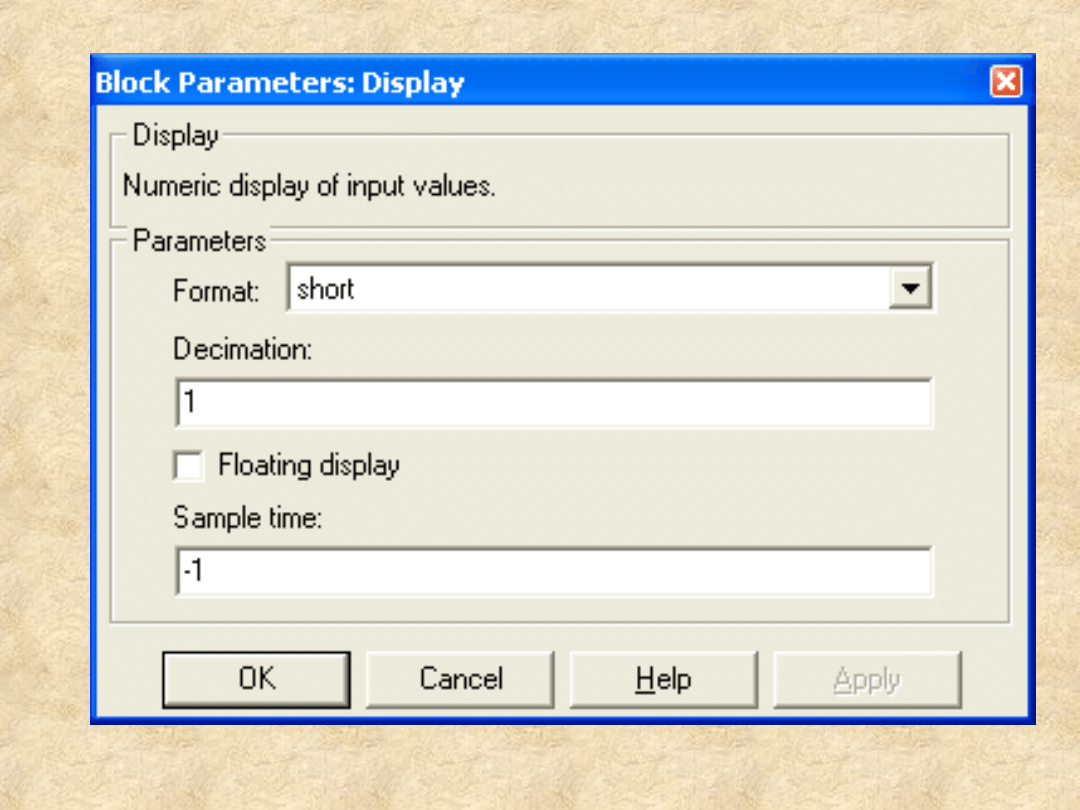
W polach okna ustawień wyświetlacza
pokazany jest format rezultatów liczbowych, w polu
Decimation (wyładowanie) zadaje się liczbę kroków
obliczeń, po których wartości wyświetlane są na
monitorze.
Ustawienie wartości 1 w polu Sample
time synchronizuje pracę bloku z krokiem
obliczeń.
Okno nastawy parametrów
wyświetlacza
Okno nastaw bloku Mux
sprzęgającego dwa sygnały w jeden
wektorowy.
W polach okna nastawy zadaje się
liczbę wejść i wewnętrzny widok kształtu
bloku.
Okno nastawy bloku Mux.
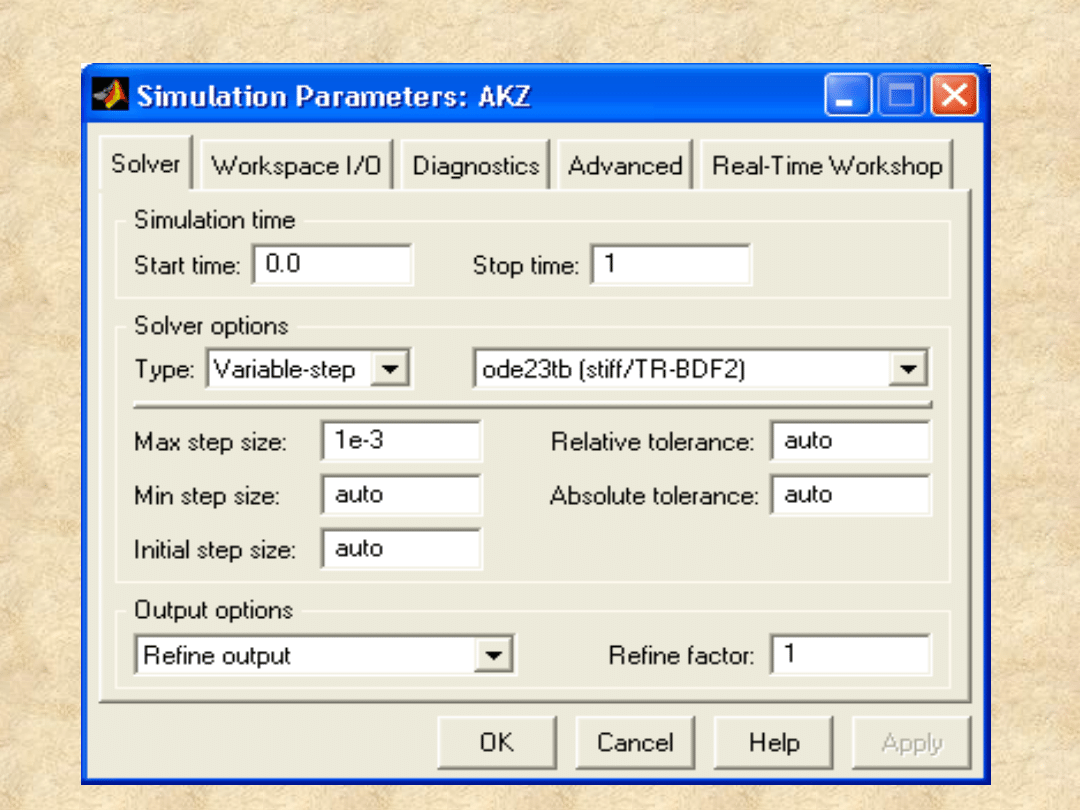
KOLEJNOŚĆ WYKONYWANIA PRACY
Okno nastawy parametrów modelowania
Zdjęcie charakterystyk mechanicznych
maszyny w układzie silnika i generatora odbywa
się w układzie do badania maszyny
asynchronicznej przy zmianie momentu
obciążenia od –1.5 do 1.5 obciążenia
nominalnego.
Przy czym dla każdej wartości momentu
obciążenia przeprowadza się modelowanie.
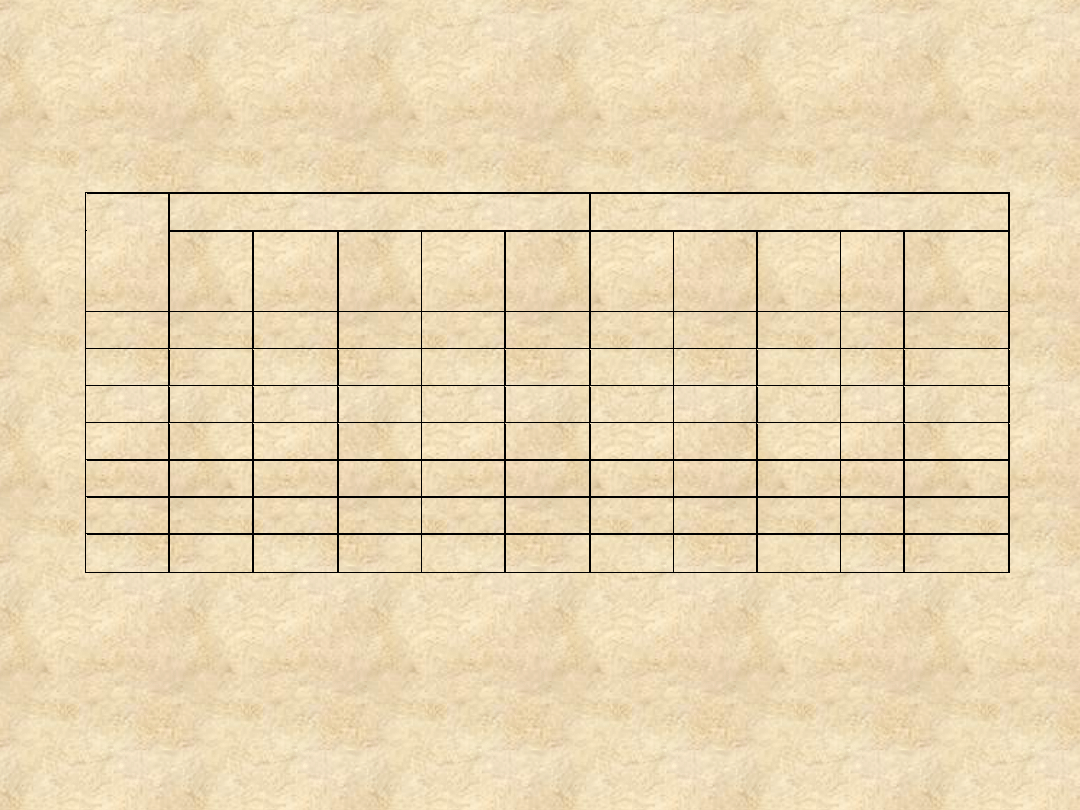
Podczas przeprowadzania badań wypełnia się tabelę
M (Nm)
(rad/sek)
Zdjęcie charakterystyk roboczych silnika
przeprowadza się na modelu przy zmianie momentu
obciążenia od 0 do 1.2 momentu nominalnego.
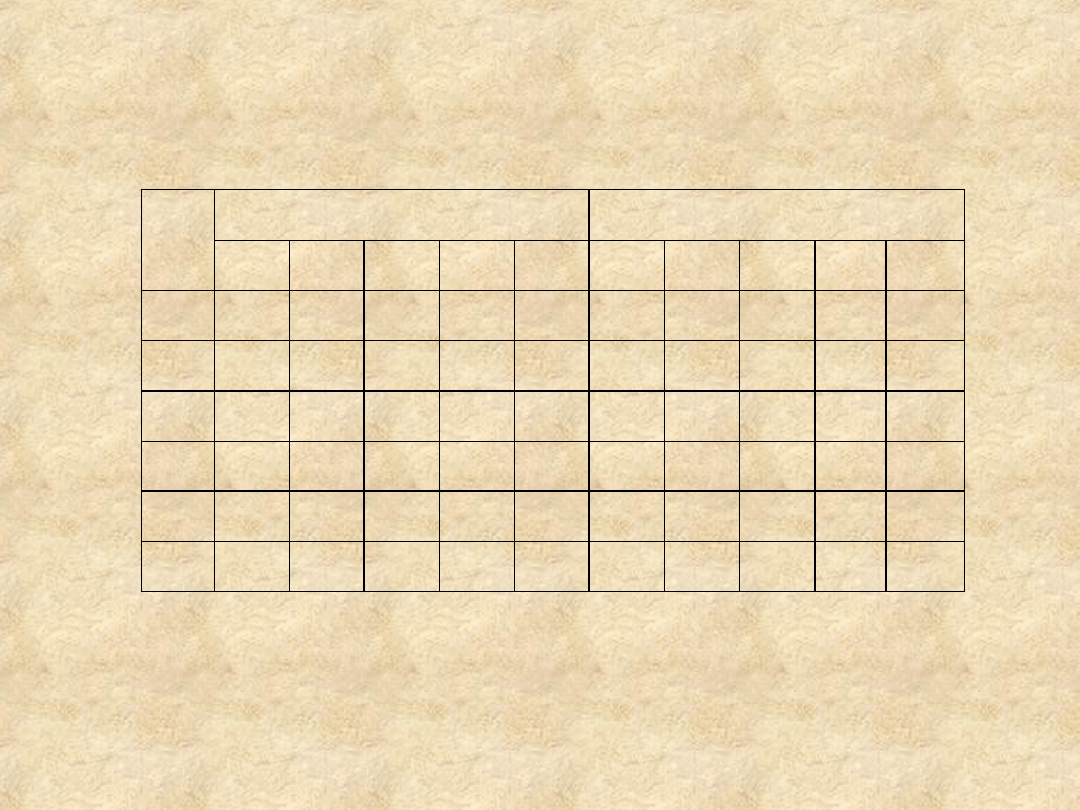
Podczas przeprowadzania badań wypełnia się
tabelę:
Pomiary
Obliczenia
M
P
1
Q
1
U
1
I
1
cos P
2
s
Nm W VAR V A rad/s stopnie
W
O bliczenia wykonuje się według wzorów:
1
1
P
Q
arctg
P
2
=M
1
2
P
P
1
2
1
s
W edług danych z tabel wykonuje się mechaniczną
charakterystykę maszyn i na osobnym rysunku
charakterystyki robocze.
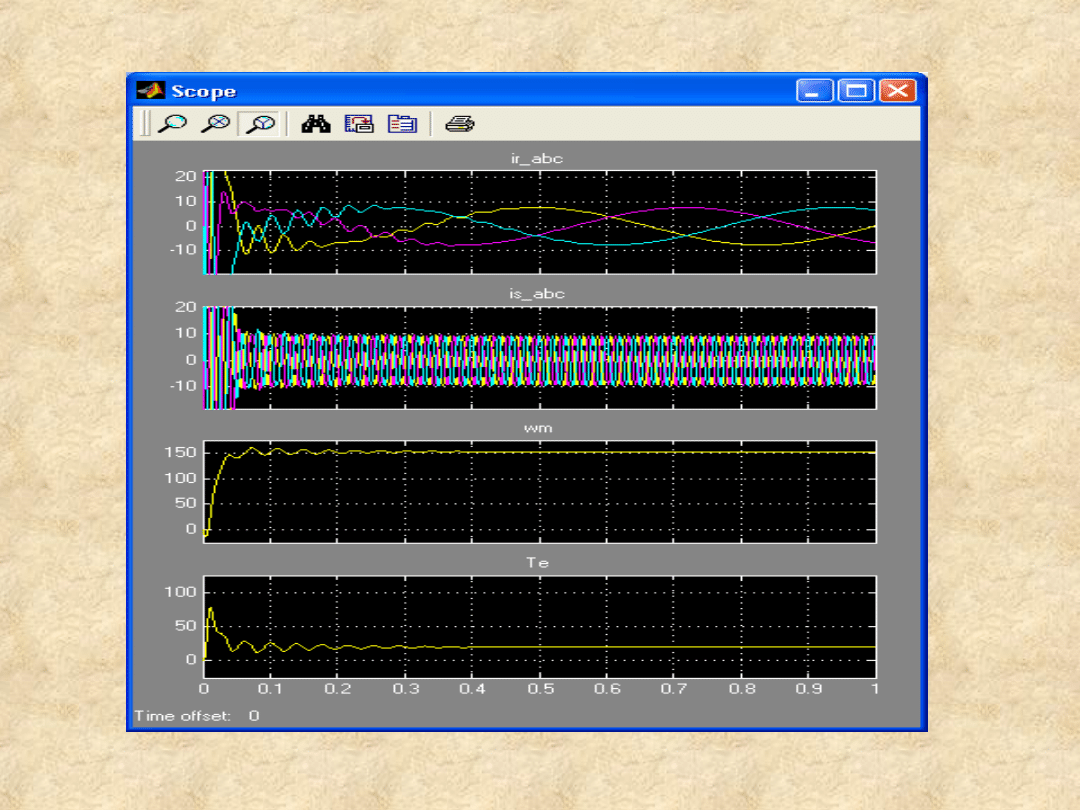
Zależności w czasie zmiennych stanu maszyny w
układzie silnikowym można zaobserwować na ekranie
oscyloskopu.
W idać tam przebieg procesu przy starcie maszyny i
przebieg przy ustabilizowaniu się pracy.
Treść sprawozdania
•Schemat modelu i opis bloków wirtualnych
•Charakterystyka mechaniczna maszyny w
układzie silnikowym i generatorowym
•Charakterystyki robocze maszyny w
układzie silnikowym
pomiary
obliczenia
M
P
1
[W]
Q
1
[VAR]
U
1
[V]
I
1
[A]
[rad/s]
cos
P
2
[W]
%
S
%
-30
5412
5412
220
8,216
162,7
45
0,707
-4881
-0,9
-0,036
-25
4815
4815
220
7,312
161,9
45
0,707
-4047
-0,84
-0,030
-20
4239
4239
220
6,439
161,1
45
0,707
-3222
-0,76
-0,025
-15
3690
3690
220
5,604
160,2
45
0,707
-2403
-0,65
-0,015
-10
3219
3219
220
5,89
159,3
45
0,707
-1593
-0,49
-0,014
-5
2862
2862
220
4,348
158,3
45
0,707 -791,5
-0,27
-0,007
CZĘŚĆ PRAKTYCZNA - POMIARY I OBLICZENIA
pomiary
obliczenia
M
P
1
[W]
Q
1
[VAR]
U
1
[V]
I
1
[A]
[rad/s]
cos
P
2
[W]
%
S
%
0
2711,4 2711,4 220
4,12 157,4
45
0,707
0
0
-0,0019
5
2785,8 2785,8 220
4,23 156,3
45
0,707 781,5 0,28 0,0044
10
3120 3120
220
4,74 155,1
45
0,707 1551 0,50 0,0127
15
3657 3657
220
5,56 153,8
45
0,707 2307 0,63 0,0210
20
4371 4371
220
6,65 152,4
45
0,707 3048 0,70 0,0299
25
5208 5208
220
7,91 150,8
45
0,707 3770 0,72 0,0401
30
6459 6459
220
9,36 149,1
45
0,707 4473 0,69 0,0509
Nm
P
Nm
P
Nm
P
Nm
P
Nm
P
Nm
P
P
arctg
arctg
arctg
arctg
4473
1
,
149
30
2
3770
8
,
150
25
2
3048
4
,
152
20
2
2307
8
,
153
15
2
1551
1
,
155
10
2
5
,
781
3
,
156
5
2
0
4
,
157
0
2
45
1
3120
3120
30
...
5
0
OBLICZENIA
69
,
0
6459
4473
30
72
,
0
5208
3770
25
70
,
0
4371
3048
20
63
,
0
3657
2307
15
50
,
0
3120
1551
10
28
,
0
8
,
2785
5
,
781
5
0
4
,
2711
0
0
1
2
P
P
%
0509
,
0
1
,
157
1
,
149
1
,
157
30
%
0401
,
0
1
,
157
8
,
150
1
,
157
25
%
0299
,
0
1
,
157
4
,
152
1
,
157
20
%
0210
,
0
1
,
157
8
,
153
1
,
157
15
%
0127
,
0
1
,
157
1
,
155
1
,
157
10
%
0044
,
0
1
,
157
3
,
156
1
,
157
5
%
0019
,
0
1
,
157
4
,
157
1
,
157
0
s
s
s
s
s
s
s
1
2
1
s
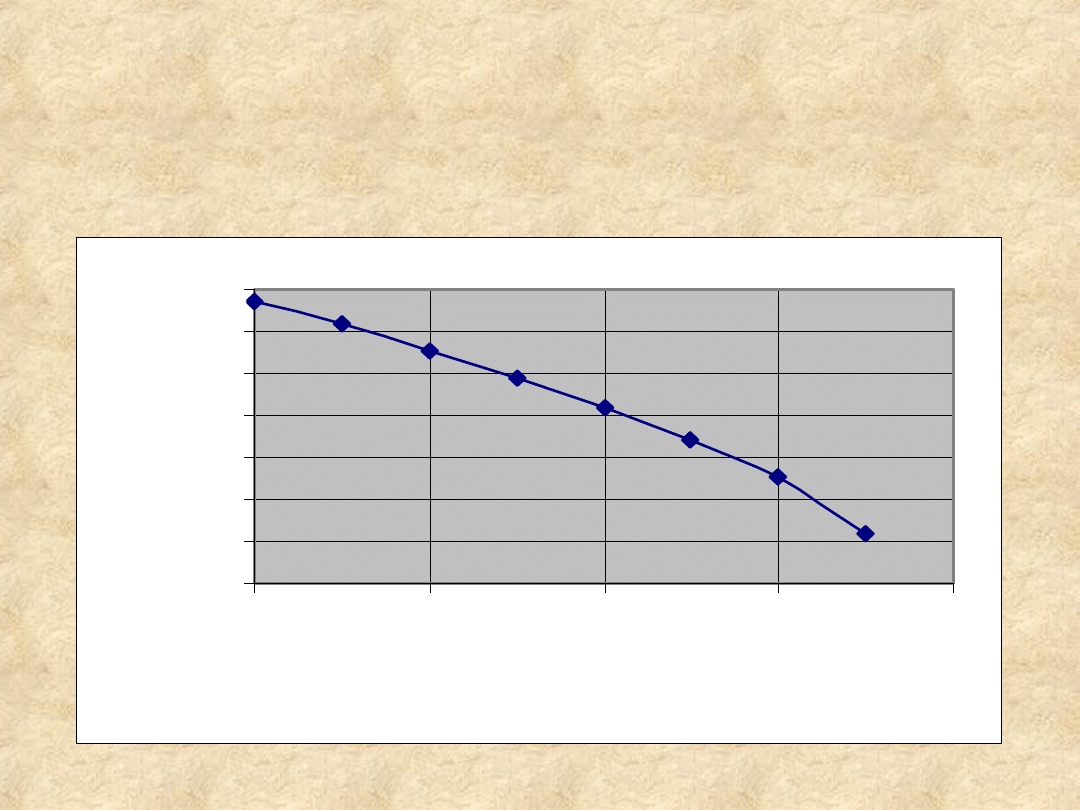
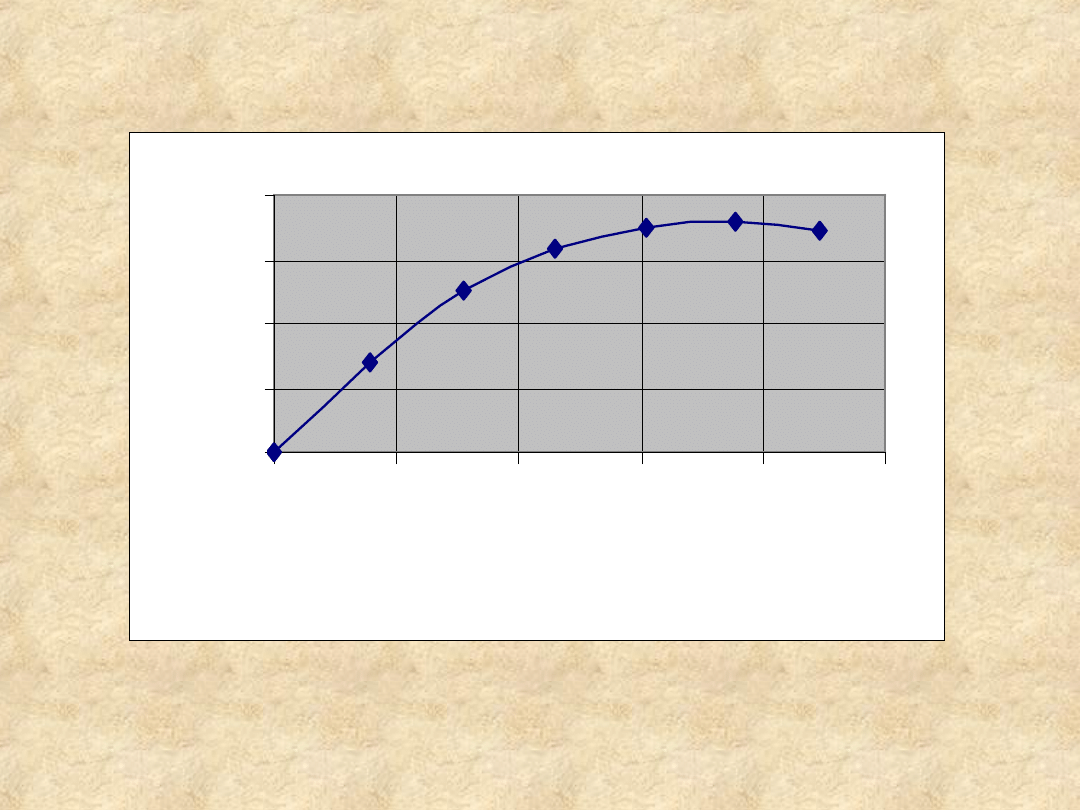
Charakterystyka mechaniczna silnika
asynchronicznego klatkowego pracującego jako silnik
144
146
148
150
152
154
156
158
0
10
20
30
40
M[Nm]
[r
a
d
/s
]
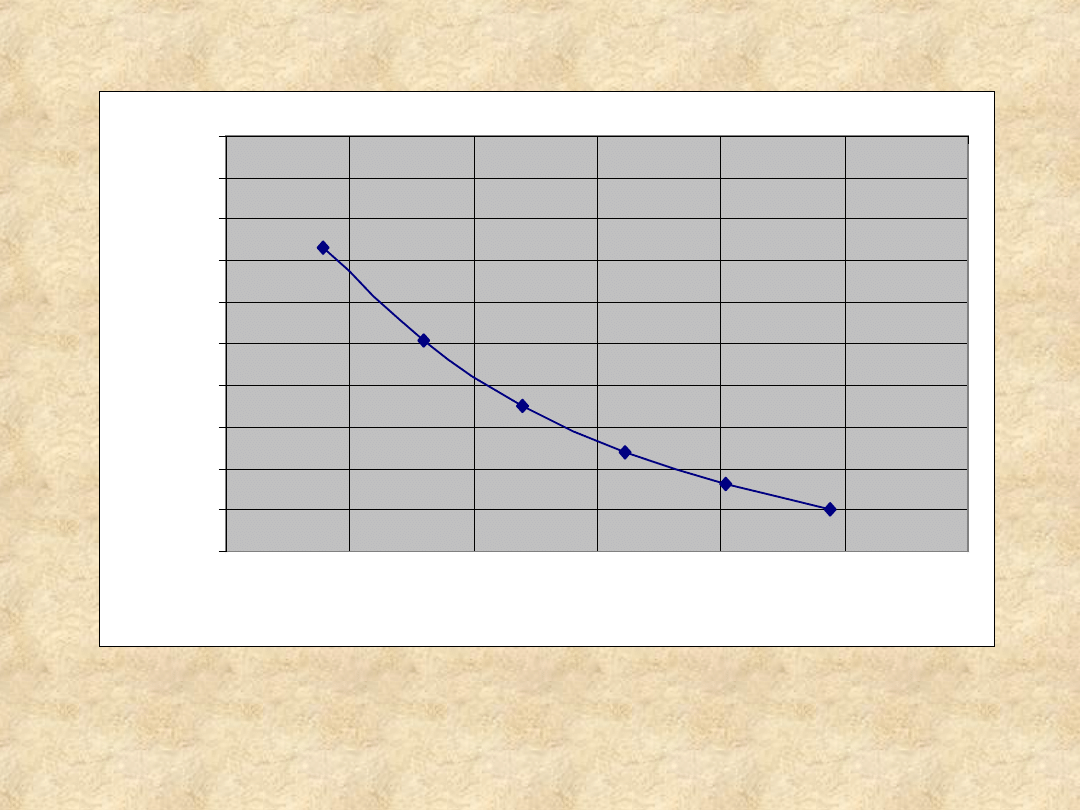
-0,02
0
0,02
0,04
0,06
0
1000
2000
3000
4000
5000
P2[W]
s
[%
]
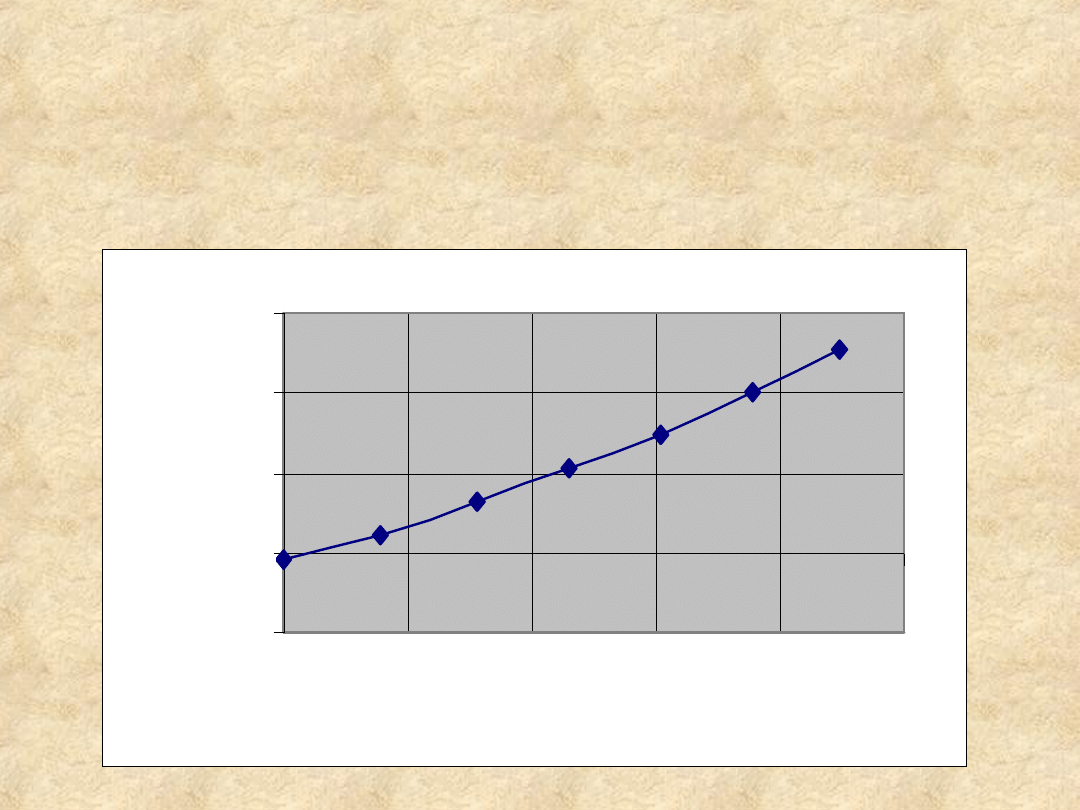
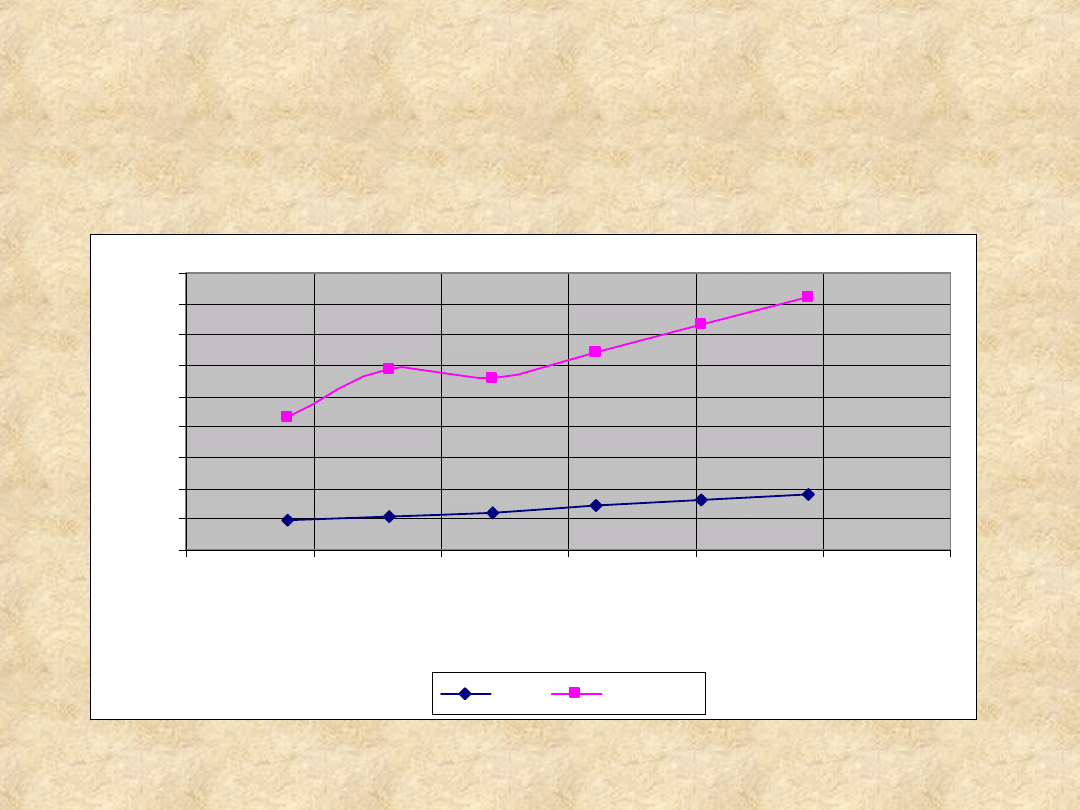
Charakterystyki robocze silnika asynchronicznego
klatkowego pracującego jako silnik
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
P2 [kW]
P
1
[k
W
]
;
I
[A
]
P1 [kW]
I [A]
0
0,2
0,4
0,6
0,8
0
1000
2000
3000
4000
5000
P2 [W]
s
pr
aw
no
ść
[%
]
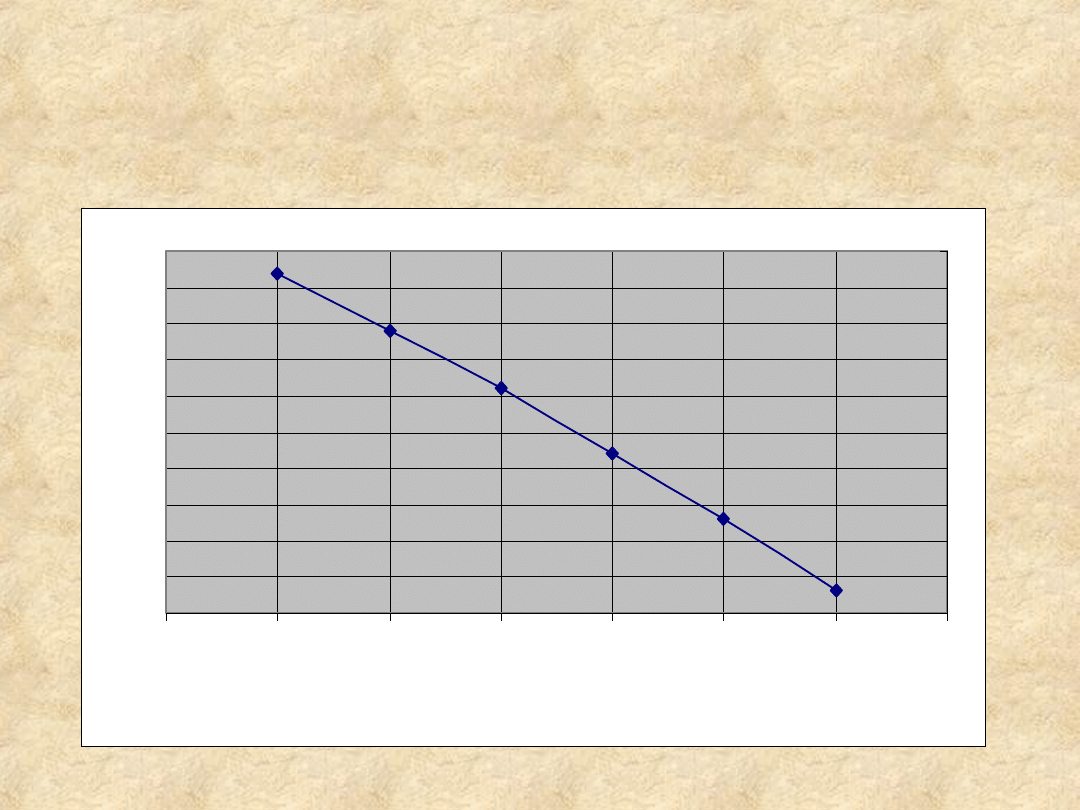
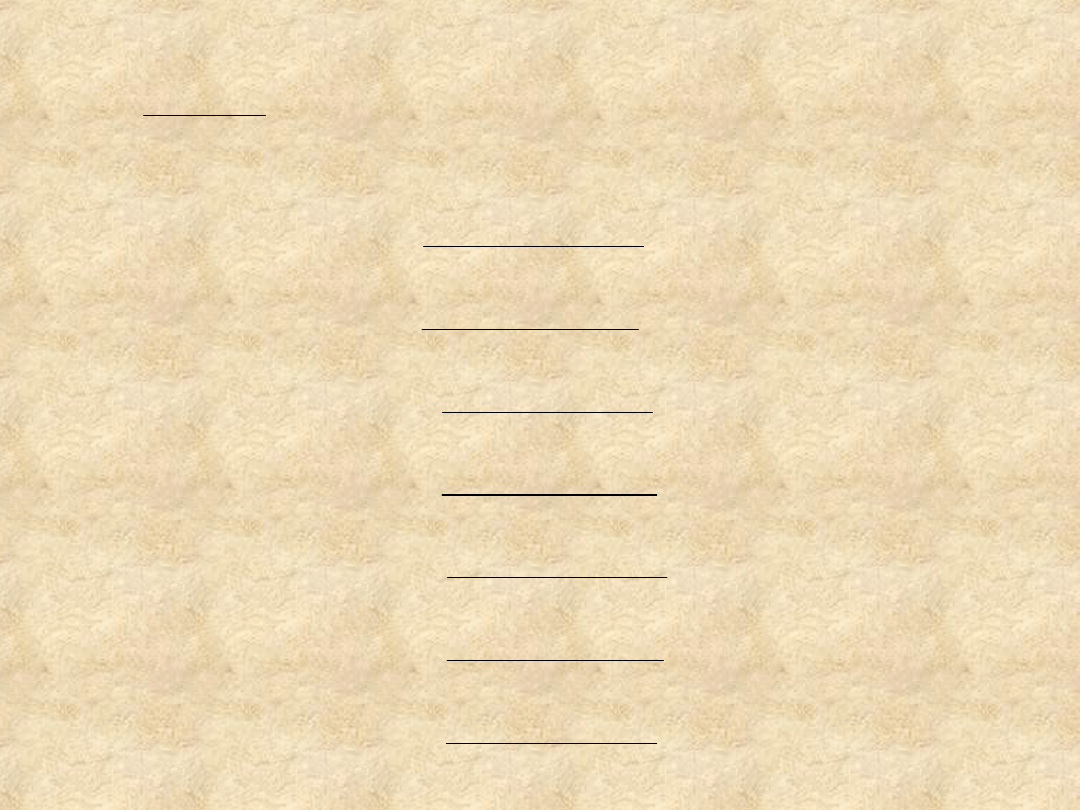
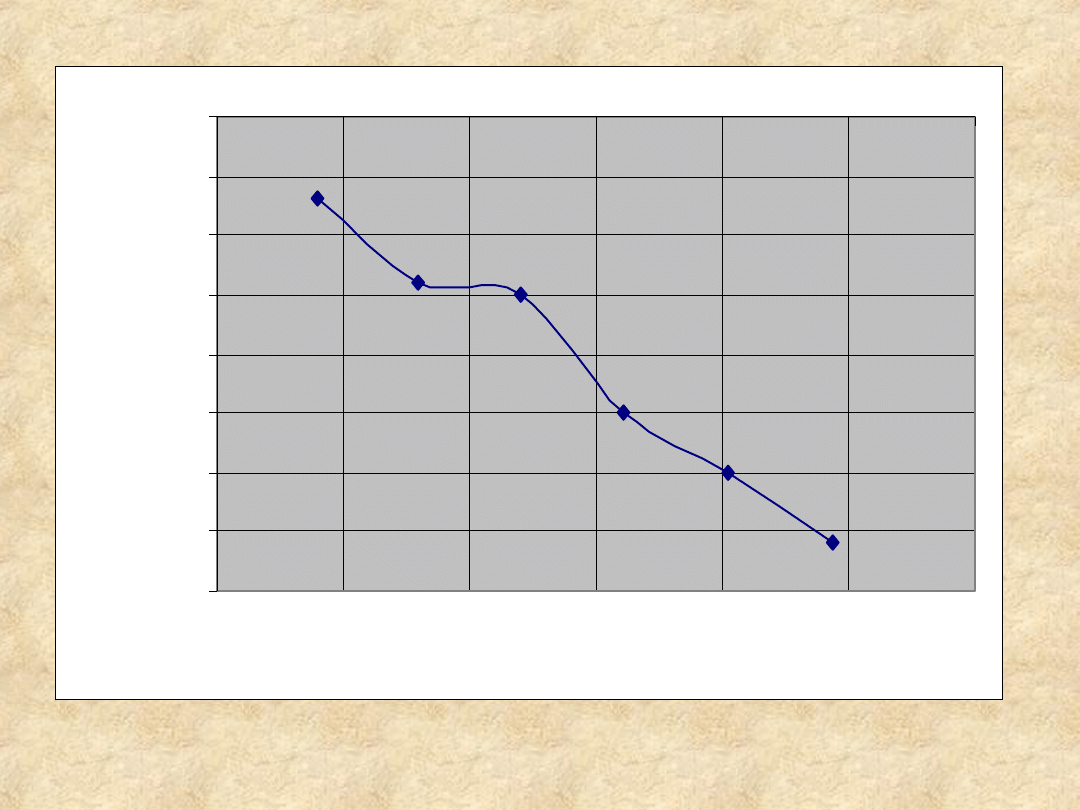
Charakterystyka mechaniczna silnika
asynchronicznego klatkowego pracującego jako
prądnica
158
158,5
159
159,5
160
160,5
161
161,5
162
162,5
163
-35
-30
-25
-20
-15
-10
-5
0
M [Nm]
[r
a
d
/s
]
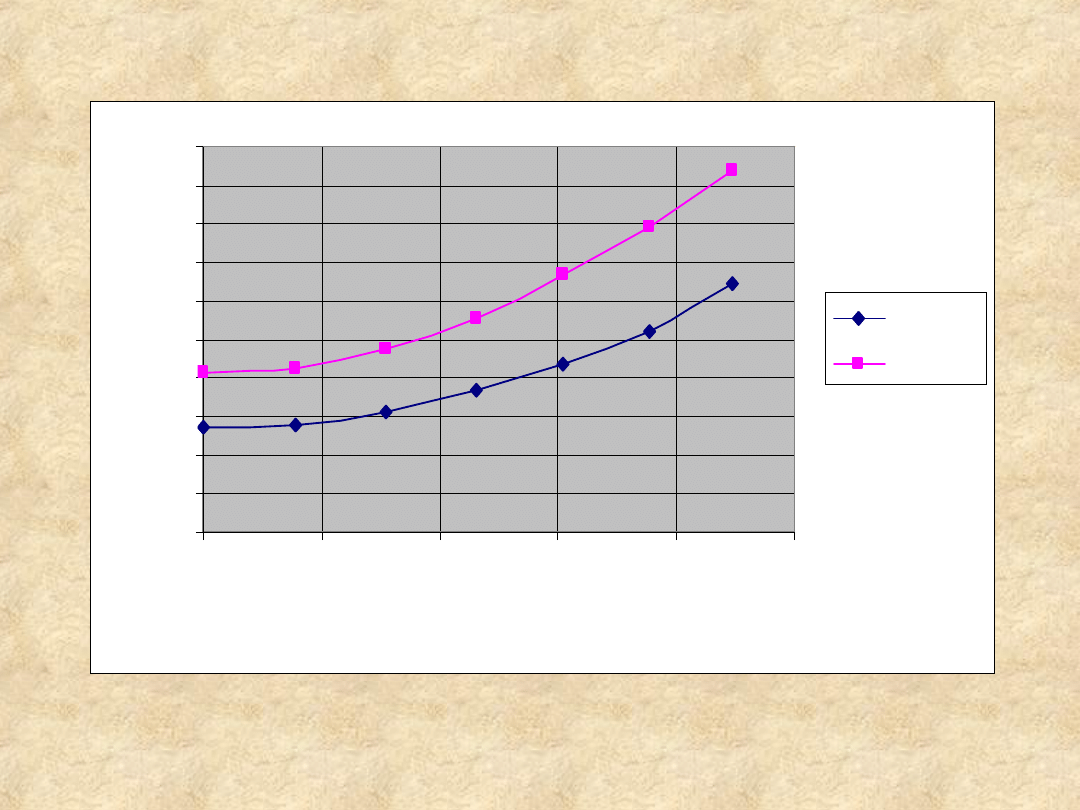
CHARAKTERYSTYKI ROBOCZE SILNIKA
ASYNCHRONICZNEGO PRACUJĄCEGO JAKO PRĄDNICA
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5
6
P2 [kW]
I
[A
]
;
P
1
[k
W
]
I [A]
P1 [kW]
-1
-0,9
-0,8
-0,7
-0,6
-0,5
-0,4
-0,3
-0,2
-0,1
0
0
1
2
3
4
5
6
P2 [kW]
sp
ra
w
n
o
ść
[
%
]
-0,04
-0,035
-0,03
-0,025
-0,02
-0,015
-0,01
-0,005
0
0
1
2
3
4
5
6
P2 [kW]
s
[%
]
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
Wyszukiwarka
Podobne podstrony:
opracowanie pyt maszyny poprawka
prezentacja maturalna poprawiona
Prezentacja protetyka popraw 2
prezentacja pierwotniaki poprawiona
prezentacja zarzad poprawiona2
prezentacja METODY poprawione
prezentacja Maszyny proste, zasady działania i zastosowanie praktyczne
Prezentacja protetyka popraw
Prezentacja wersja poprawiona
prezentacja m gruntow poprawiona
prezentacja maszyny
prezentacja Zasda poprawnej legislacji w praktyce
TENSES prezentacja wersja poprawiona
Prezentacja poprawiona
Maszynoznawstwo prezentacja multimedialna
opis slajow do prezentacji poprawionej 2
Staliwa węglowe i konstrukcyjne stopowe, Inżynieria chemiczna i procesowa, Materiało- i maszynoznaws
więcej podobnych podstron