Współczesne maszyny
wytrzymałościowe
Marcin Graba
POLITECHNIKA ŚWIĘTOKRZYSKA W
KIELCACH
WYDZIAŁ MECHATRONIKI I BUDOWY
MASZYN
KATEDRA PODSTAW KONSTRUKCJI MASZYN
www.tu.kielce.pl/~mgraba Copyright
2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Cel ćwiczenia
•Rodzaje maszyn wytrzymałościowych
•Możliwe do wykonanie rodzaje badań
•Rejestracja sygnałów
•Błąd pomiaru
•Charakterystyka maszyny UTS
•Charakterystyka maszyny MTS
•Programowanie sterownika MTS
•Wykonanie ćwiczenia
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Rodzaje maszyn
wytrzymałościowych
• Maszyny elektryczne (UTS, INSTRON)
- urządzeniem napędzającym jest silnik elektryczny
- przeznaczone do badań statycznych (jednoosiowa próba
rozciągania,
WIN, całka J)
- możliwie duży zakres siły i przemieszczenia
- mała częstotliwość w przypadku badań dynamicznych
• Maszyny hydropulsacyjne (MTS)
- urządzeniem napędzającym jest pompa olejowa
(elektrohydrauliczny
wzbudnik drgań - EWD)
- przeznaczone do badań statycznych jak i dynamicznych
(próby
rozciągania, odporności na pękanie, zmęczenie materiałów)
- zakres przemieszczenia i siły zależy od częstotliwości pracy
• Młoty Charpy’ego i młoty spadowe
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Rejestracja sygnałów
• Pełna komputeryzacja pomiarów
• Sygnał z maszyny przekazywany jest za
pomocą karty analogowo-cyfrowej (AC) do
komputera (wielkością fizycznym – siła,
przemieszczenie, odkształcenie – przypisane
są
odpowiednie
poziomy
napięcia,
odpowiadające poziomom na karcie AC
• Stosowane karty AC – 12 bitowe (4096
poziomów dla danego zakresu napięcia) oraz
16 bitowe (65536 poziomów dla danego
zakresu napięcia)
• Możliwość przekazania sygnału na port
drukarki
• Zapis plików z pomiarami w postaci
tekstowej lub binarnej w celu dalszej obróbki
• Każdy pomiar obarczony jest błędem
• Rzadko uzyska się wartość wielkości mierzonej, która
wcale nie różni się od zadanej
• Błąd bezwzględny N – różnica algebraiczna pomiędzy
rezultatem pomiaru mierzonej wielkości X i jej
rzeczywistą wartością N, wyrażona w jednostkach
miary
• Błąd względny
N
– wartość błędu bezwzględnego
wyrażonego
w
jednostkach
mierzonej
wielkości
odniesiona do wartości rzeczywistej wielkości N,
wyrażona w procentach
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Błąd pomiaru
N
X
N
%
100
N
N
N
%
100
N
N
N
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Charakterystyka maszyny UTS
• urządzeniem napędzającym jest silnik
elektryczny
• przeznaczone do badań statycznych
(jednoosiowa próba rozciągania, WIN,
całka J)
• możliwie
duży
zakres
siły
i
przemieszczenia
• mała częstotliwość w przypadku badań
dynamicznych
• maksymalna siła około 100kN
• zakres przemieszczenia około 500mm –
ulega
zmniejszeniu
w
przypadku
założenia uchwytów
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Charakterystyka maszyny MTS
• urządzeniem napędzającym jest pompa
olejowa elektrohydrauliczny wzbudnik drgań
- EWD)
• przeznaczone do badań statycznych jak i
dynamicznych (próby rozciągania, odporności
na pękanie, zmęczenie materiałów)
• zakres przemieszczenia i siły zależy od
częstotliwości
pracy
–
charakterystyka
częstotliwościowa
• maksymalna siła około 250kN
• zakres przemieszczenia około 100mm –
ulega zmniejszeniu w przypadku założenia
uchwytów
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Charakterystyka maszyny
MTS
• poziom
obciążenia
lub
przemieszczenia
zależy od parametrów wkładki;
• możliwość sterowania siłą, przemieszczeniem
i odkształceniem
• maksymalna częstotliwość pracy przy małym
zakresie ruchu trawersy 30Hz (50Hz lub
100Hz dla drugiej maszyny o nacisku 100kN i
przemieszczeniu 10mm )
• możliwość
wykonania
szeregu
badań
doświadczalnych w zależności od potrzeb;
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
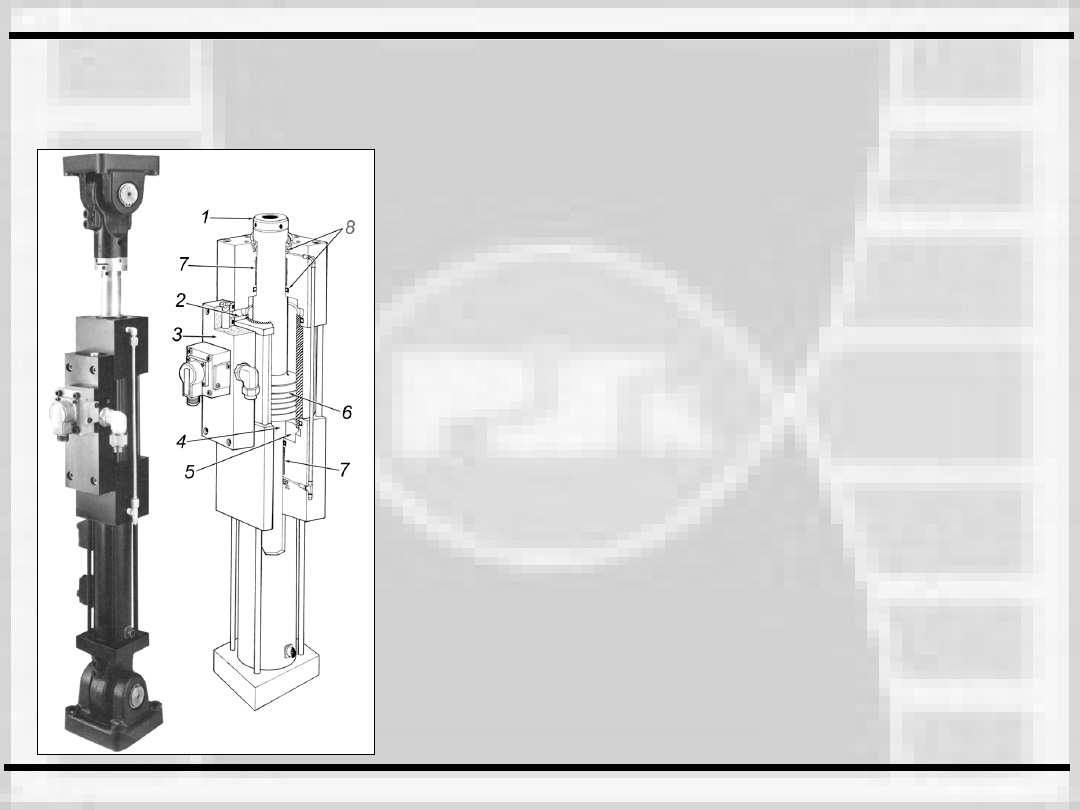
Maszyna MTS - EWD
Elektrohydrauliczny wzbudnik
drgań
1-tłoczysko
2-
zasilanie,
3-
obudowa serwozaworu, 4-dolna
część
tłoczyska,
5-komora
cylindra, 6-tłok, 7,8, uszczelnienia
Zmiany przemieszczenia tłoczyska w czasie
powodowane są zmianami elektrycznego
sygnału sterującego. Specjalny serwozawór
sterowany elektromagnetycznie umożliwia
przetłaczanie dużych ilości oleju pod
ciśnieniem rzędu 20MPa do komór cylindra
po obu stronach tłoka. Różnica ciśnień po
obu
stronach
tłoka
wywołuje
siłowe
oddziaływanie
elementu
wykonawczego
wzbudnika na badany obiekt (dynamiczne
wymuszenie drgań obiektu), zaś różne
objętości oleju po obu stronach tłoka są
przyczyną
przemieszczeń
elementu
wykonawczego (kinematyczne wymuszenie
drgań).
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
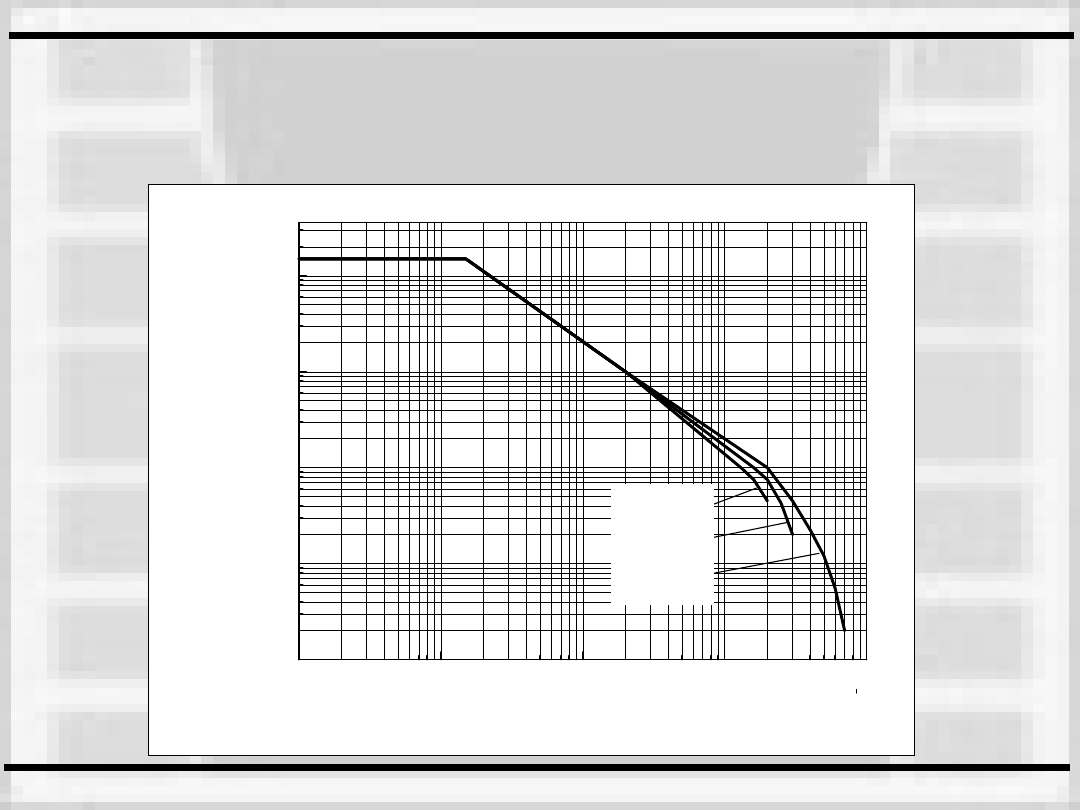
Maszyna MTS –
charakterystyka
częstotliwościowa
0.1
1
10
100
1000
0.01
0.1
1
10
100
50 [kN]
25 [kN]
0 [kN]
p
rz
e
m
ie
sz
cz
e
n
ie
t
ło
c
zy
sk
a
[
m
m
]
częstotliwość [Hz]
www.tu.kielce.pl/~mgraba Copyright
2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
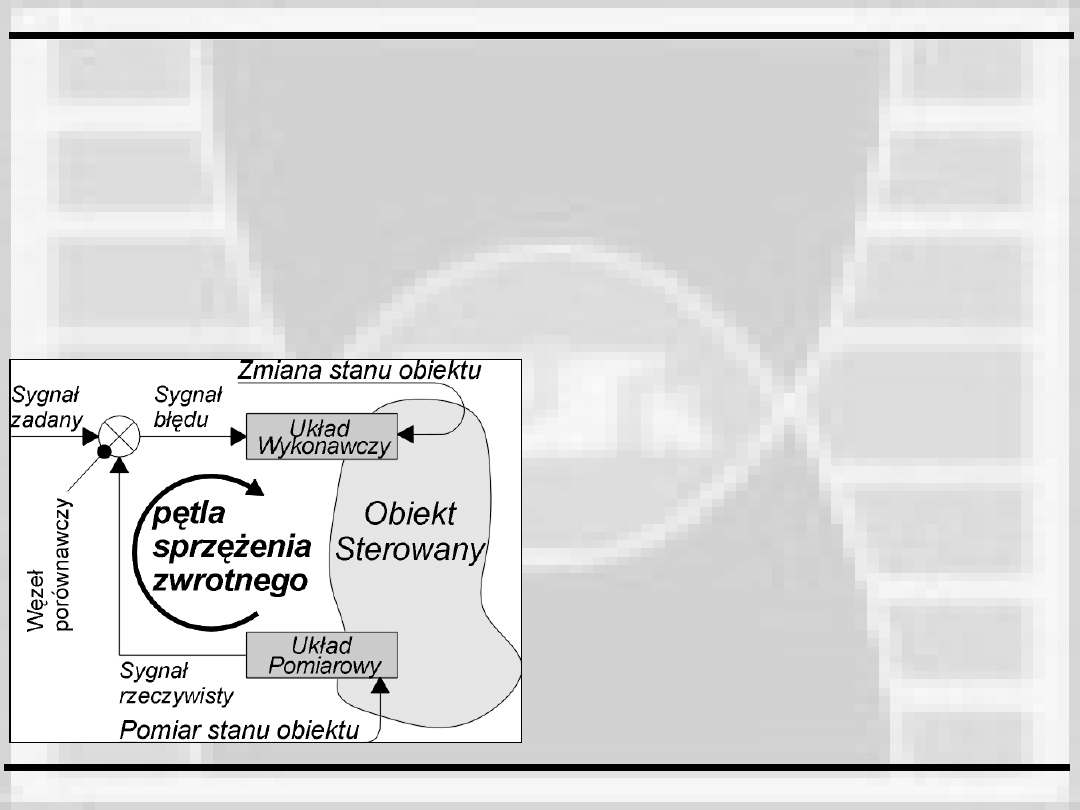
Maszyna MTS – pętla
sprzężenia zwrotnego
rzeczywisty jest mierzony w czasie
rzeczywistym, możliwe jest więc
ich porównanie. Jeśli występuje
między
nimi
różnica
(to
porównanie wytworzenie sygnału
błędu
wykonuje
węzeł
porównawczy; ta organizacja PSZ
powoduje taką reakcję elementu
wykonawczego, by powstały błąd
sprowadzić
do
wartości
minimalnej. Istotą opisywanego
układu
sterowania
jest
takie
oddziaływanie
na
układ
wykonawczy
sterowania
(na
siłownik
hydrauliczny
poprzez
EWD), by jego stan był zgodny z
sygnałem zadanym.
Aby sterować w czasie rzeczywistym dynamicznymi własnościami
stanowiska badawczego (poprzez EWD) wykorzystuje się podstawową
metodę układów automatyki, tzw. pętlę sprzężenia zwrotnego (PSZ).
Ogólnie układ taki działa poprzez porównanie sygnału wyjściowego
informującego o wybranym stanie obiektu z sygnałem wejściowym
(zadanym). Sygnał zadany generowany jest najczęściej w układach
cyfrowych. Sygnał
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
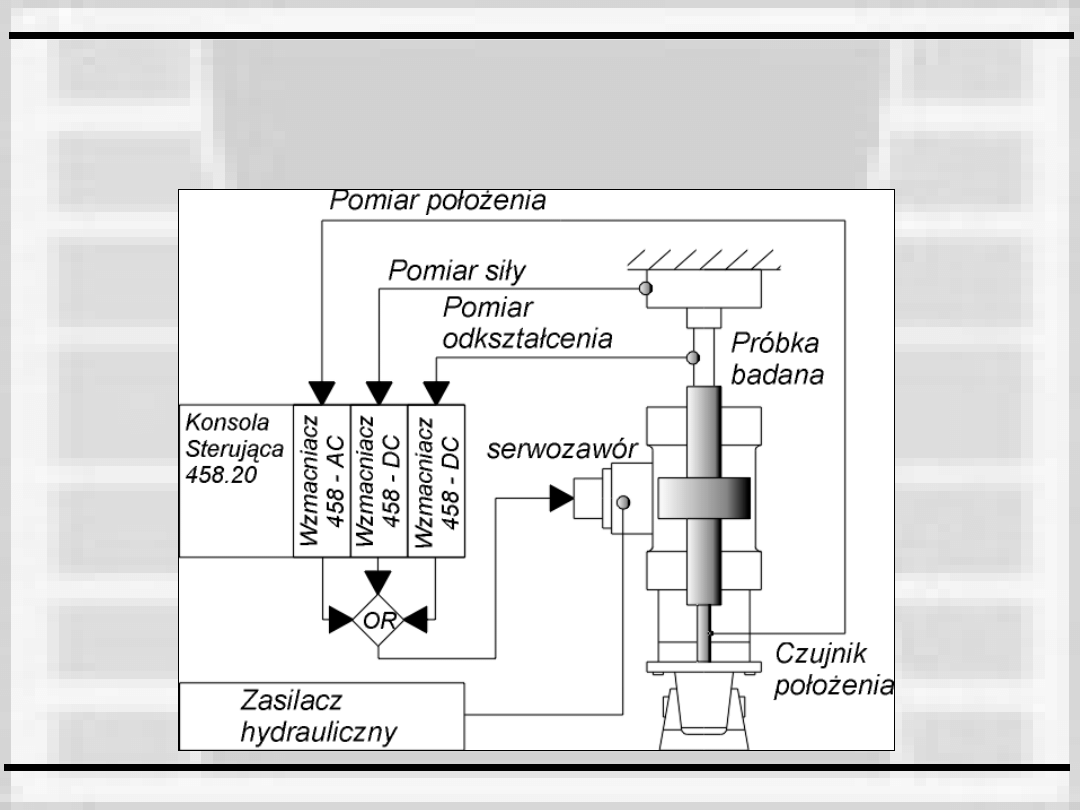
Maszyna MTS – sterowanie
siłownikiem MTS
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Maszyna MTS – programowanie
sterownika
Tworzenie programów dla sygnałów sterujących oparte w
systemie MTS na składaniu złożonego przebiegu z
elementarnych fragmentów nazywanych segmentami.
Przyjęto następujące zasady:
• nie definiujemy parametrów początkowych segmentu,
(stan początkowy) wynikają one bądź z bieżącego
położenia sterowanego elementu bądź są to końcowe
parametry poprzedniego segmentu,
• definiujemy parametry końcowe segmentu (stan
końcowy),
• wybieramy postać segmentu (sposób przejścia ze
stanu początkowego do stanu końcowego).
Segment może mieć postać:
- liniową (Ramp),
- nieliniową (harmoniczny, połowa okresu, Haversine),
- stałą (Hold),
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
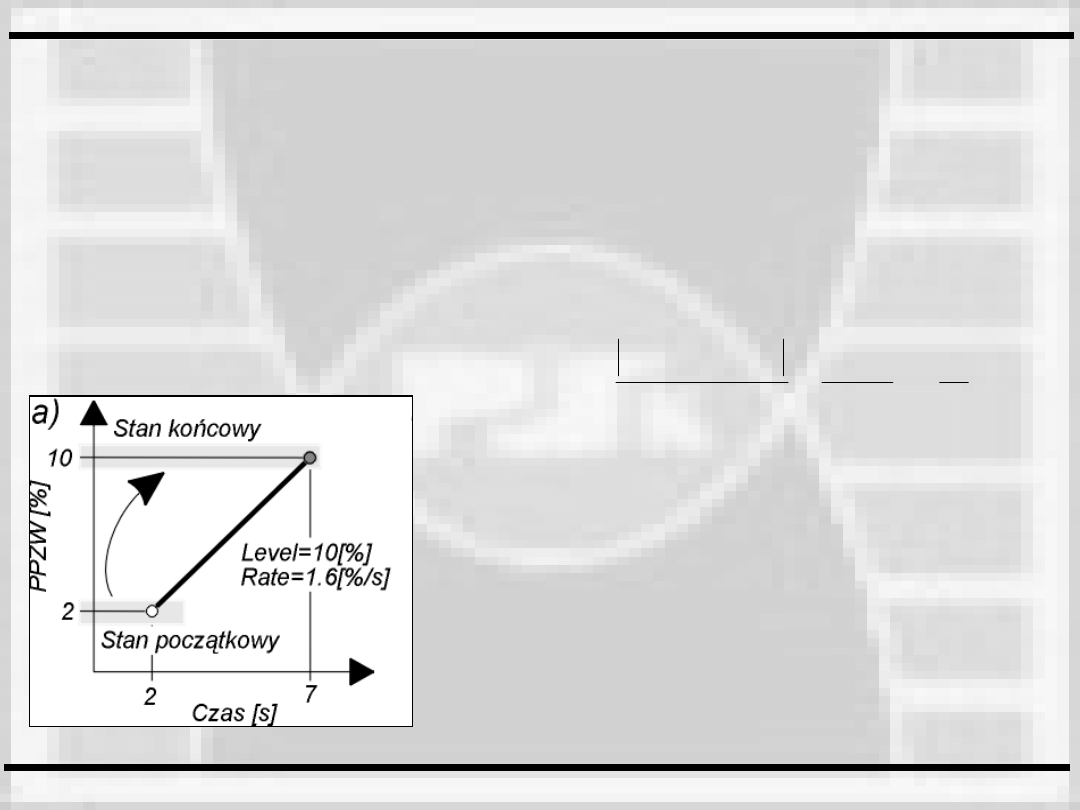
Maszyna MTS – programowanie
sterownika – blok liniowy
gdzie WPK, WPP to odpowiednio
współrzędne punktu końcowego i
współrzędne punktu początkowego
wyrażone w skali względnej (PPZW),
t
czas
wyrażony
w sekundach,
(przyrost
sygnału
sterowanego / przyrost czasu), PZW jak
wyżej. Dla przykładu pokazanego na
rysunku
2.11a
wyznaczono:
WPK = 10 [%], WPP = 2 [%],
t = 7-
2 = 5 [s], Rate = (10-2) / 5 = 1,6 [%/s],
Level = 10 [%]
Programując liniową zmianę sterowanego sygnału podajemy dwie
informacje:
1) pożądany poziom stanu końcowego (Level) w PPZW [%],
2) prędkość (Rate) tj. pochylenie linii segmentu wyrażone w
PPZS[%]/czas[s] wyznaczoną wg jednego ze wzorów:
s
PZW
t
WPP
WPK
Rate
%
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
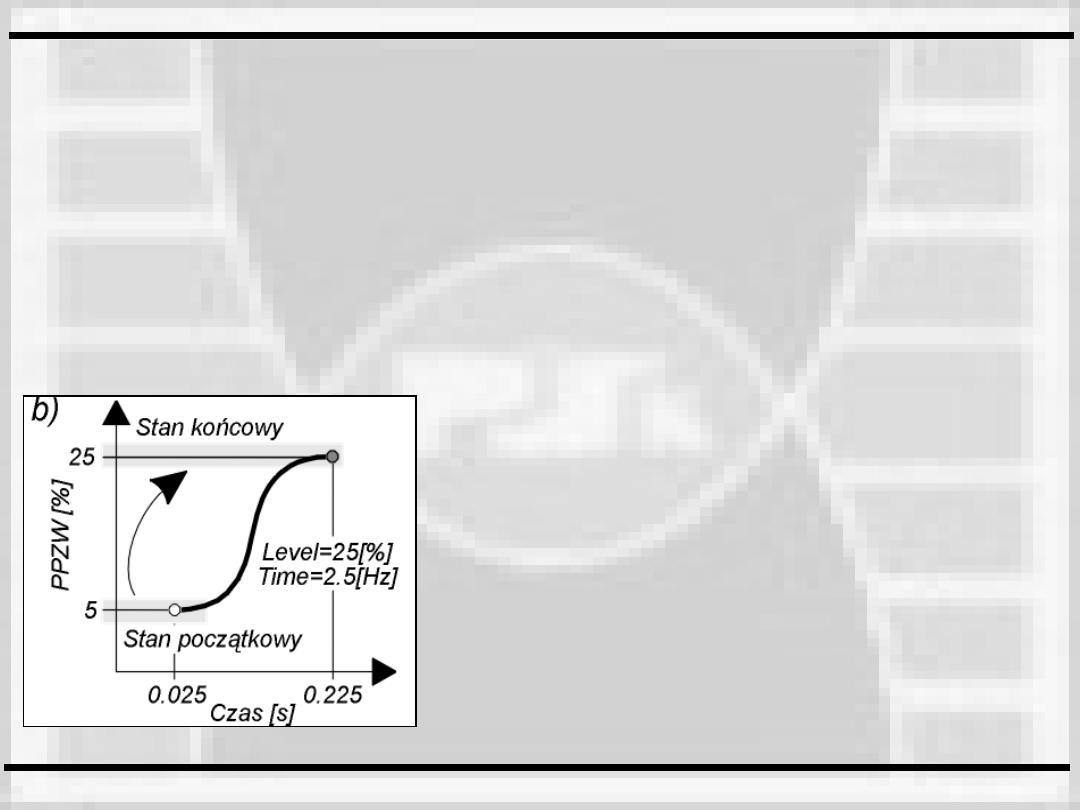
Maszyna MTS – programowanie
sterownika – blok nieliniowy
Level = 25 [%],
zaś
Frequency = 2,5 [Hz]
bo
segment
definiowany jest dla połowy okresu
przebiegu harmonicznego tzn.
0,5 1/f = (0,225-0,025) [s],
stąd f = 2,5 [Hz] (wpisujemy w pozycji
Time=2,5)
Programując nieliniową zmianę sterowanego sygnału podajemy
dwie informacje:
1) pożądany poziom stanu końcowego (Level) w PPZW [%],
2) częstotliwość f wyrażoną w [Hz] (wpisujemy w pozycji Time MP).
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
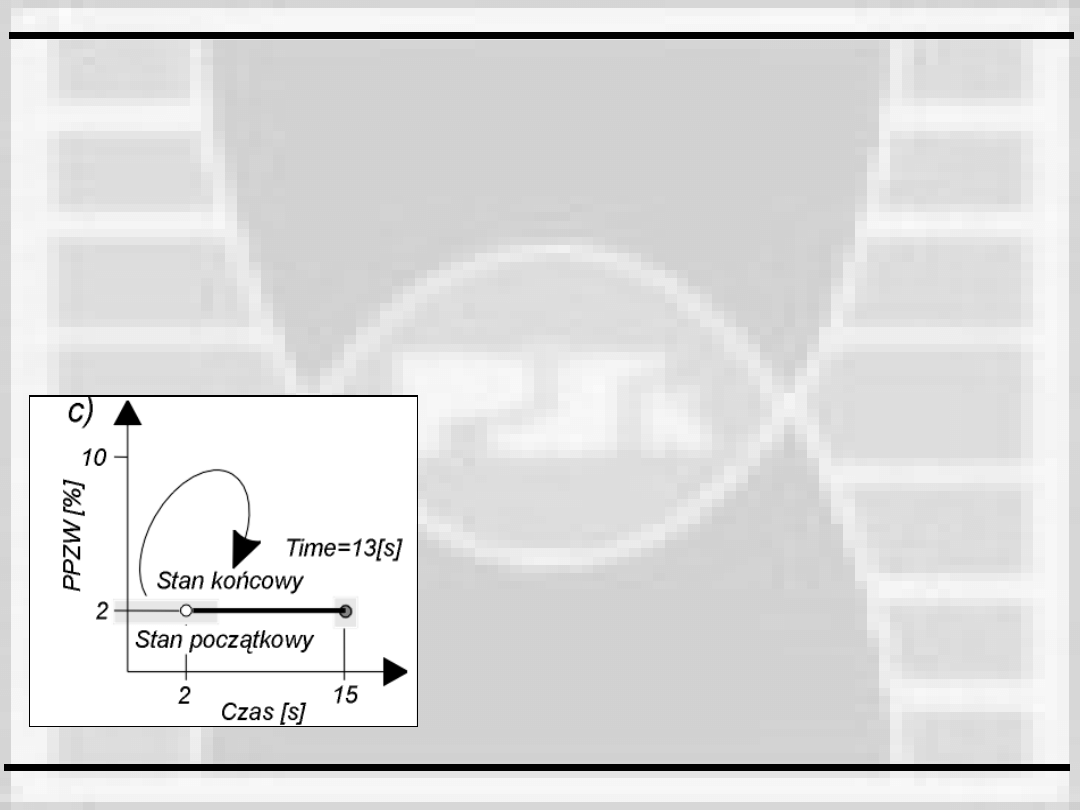
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Maszyna MTS – programowanie
sterownika – blok stały
Time = (15-2) s= 13 [s].
Programując stały segment sterowanego sygnału podajemy tylko
czas trwania bieżącej wartości sygnału:
1) Time wyrażony w sekundach
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Wykonanie ćwiczenia -
sporządzenie sprawozdania -
część I
• Zaprogramować program liniowy (napisać program dla
maszyny MTS)
• Zarejestrować jego przebieg
• Kolejne segmenty opisać liniami prostymi o równaniu
y=ax+b w celu uzyskania przebiegu teoretycznego
• Dla czasu próbkowania podanego w rejestracji przebiegu
rzeczywistego wykreślić przebieg teoretyczny
• Wyznaczyć błąd względny i bezwzględny
• Sporządzić
wykresy
sygnałów
rzeczywistego
i
teoretycznego oraz wykresy błędów w całej dziedzinie
czasu
• W tabeli dla punktów charakterystycznych i miejsc
zerowych zarejestrowanego sygnału podać wartości
rzeczywistą, teoretyczną i wartości obu błędów
• Wnioski
www.tu.kielce.pl/~mgraba Copyright 2007 Marcin Graba – Politechnika Świętokrzyska
w Kielcach
WSPÓŁCZESNE MASZYNY WYTRZYMAŁOŚCIOWE
Wykonanie ćwiczenia -
sporządzenie sprawozdania -
część II
• Zaprogramować program nieliniowy (napisać program dla
MTS)
• Zarejestrować jego przebieg z różnym czasem próbkowania
• Zestawić wykresy zarejestrowane w trakcie próby i
porównać je
• Dla najdokładniej odwzorowanego sygnału opisać jego
przebieg równaniem typu y=B+A(sint+)
• Na podstawie wyznaczonego równania odtworzyć jego
przebieg i sporządzić wykres sygnału teoretycznego
• Wyznaczyć błąd względny i bezwzględny
• Sporządzić oraz wykresy błędów w całej dziedzinie czasu
dla trzech prób
• W tabeli dla punktów charakterystycznych i miejsc
zerowych zarejestrowanego sygnału podać wartości
rzeczywistą, teoretyczną i wartości obu błędów
• Wnioski
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
Prezentacja1 01
prezentacja 7 01 Metody pomiaru R
Prezentacja 01 03
Prezentacja 01, PREZENTACJA MATURALNA, OGRÓD w literaturze, malarstwie i muzyce, prezentacja tematu
Prezentacja1 01
prezentacja 01
Antologia Harlequin na Życzenie 08 Świąteczny prezent 01
01 Prezentacja Komunikacja spoleczna
prezentacja L6 01 Systemy liczenia
magazyn dzwig 01 05 prezentacja dzialanosci
Nauka czytania w klasie I prezentacja 23 01
cukrzyca Nowa prezentacja 24 01 06r
Prezentacje 13 12 12 03 01 13
R.Koscielak-integracja spolecz. niep.umysl. - 11.01.10, studia notatki, notatki, prezentacje, itp
01. nozologia rkz wstrzas skrot prezentacji, medycyna, III rok, patofizjologia
0
więcej podobnych podstron