Kinematyka prosta
Kinematyka prosta
Macierze
Macierze
Mnożenie macierzy
Mnożenie macierzy
nie jest
nie jest
przemienne,
przemienne,
i aby można było mnożyć macierze
i aby można było mnożyć macierze
ilość kolumn 1 macierzy musi być
ilość kolumn 1 macierzy musi być
równa ilości wierszy 2 macierzy
równa ilości wierszy 2 macierzy
Macierz A mnożymy przez macierz B
Macierz A mnożymy przez macierz B
p
o
n
m
l
k
j
i
h
g
f
e
d
c
b
a
A
8
7
6
5
4
3
2
1
z
y
x
w
u
t
s
r
B
A*B=C
A*B=C
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
C
Tak więc aby uzyskać wynik np. „x10”
Tak więc aby uzyskać wynik np. „x10”
mnożymy pierwszą liczbę 3 wiersza
mnożymy pierwszą liczbę 3 wiersza
macierzy A z pierwszą liczbą 2 kolumny
macierzy A z pierwszą liczbą 2 kolumny
macierzy B następie dodajemy do tego
macierzy B następie dodajemy do tego
iloczyn drugiej liczby 3 wiersza
iloczyn drugiej liczby 3 wiersza
macierzy A i drugiej liczby 2 kolumny
macierzy A i drugiej liczby 2 kolumny
macierzy B potem znów dodajemy
macierzy B potem znów dodajemy
iloczyn trzeciej liczby 3 wiersza
iloczyn trzeciej liczby 3 wiersza
macierzy A i trzeciej liczby 2 kolumny
macierzy A i trzeciej liczby 2 kolumny
macierzy B i znów dodajemy iloczyn
macierzy B i znów dodajemy iloczyn
czwartej liczby 3 wiersza macierzy A i 4
czwartej liczby 3 wiersza macierzy A i 4
liczby 2 kolumny macierzy B i tak
liczby 2 kolumny macierzy B i tak
otrzymujemy wynik w macierzy C
otrzymujemy wynik w macierzy C
będący przecięciem 3 wiersza i 2
będący przecięciem 3 wiersza i 2
kolumny (tj. x10).
kolumny (tj. x10).
W przypadku innych wyników mnożenia
W przypadku innych wyników mnożenia
postępujemy analogicznie, co widać na
postępujemy analogicznie, co widać na
następnym slajdzie.
następnym slajdzie.
Rozpisanie wyników mnożenia
Rozpisanie wyników mnożenia
macierzy :
macierzy :
5
*
1
*
*
*
13
5
*
1
*
*
*
9
5
*
1
*
*
*
5
5
*
1
*
*
*
1
p
o
s
n
r
m
x
l
k
w
j
r
i
x
h
g
w
f
r
e
x
d
c
w
b
r
a
x
7
*
3
*
*
*
16
7
*
3
*
*
*
11
7
*
3
*
*
*
7
7
*
3
*
*
*
*
3
p
o
y
n
t
m
x
l
k
y
j
t
i
x
h
g
y
f
t
e
x
d
c
y
b
t
a
x

6
*
2
*
*
*
14
6
*
2
*
*
*
10
6
*
2
*
*
*
6
6
*
2
*
*
*
2
p
o
x
n
s
m
x
l
k
x
j
s
i
x
h
g
x
f
s
e
x
d
c
x
b
s
a
x
8
*
4
*
*
*
16
8
*
4
*
*
*
*
12
8
*
4
*
*
*
8
8
*
4
*
*
*
4
p
o
z
n
u
m
x
l
k
z
j
u
i
x
h
g
z
f
u
e
x
d
c
z
b
u
a
x

Proste zadanie kinematyki
Proste zadanie kinematyki
–
–
polega ono na obliczeniu pozycji i
polega ono na obliczeniu pozycji i
orientacji chwytaka względem
orientacji chwytaka względem
nieruchomej podstawy
nieruchomej podstawy
manipulatora.
manipulatora.
Aby tego dokonać niezbędna jest notacja
Aby tego dokonać niezbędna jest notacja
Denavita-Hartenberga i notacja Eulera
Denavita-Hartenberga i notacja Eulera
.
.
Notacja
Notacja
Denavita-Hartenberga
Denavita-Hartenberga
jest to
jest to
zagadnienie analizy względnego
zagadnienie analizy względnego
położenia ciała, znajdującego się w
położenia ciała, znajdującego się w
jednym układzie, w stosunku do jego
jednym układzie, w stosunku do jego
położenia w innym układzie.
położenia w innym układzie.
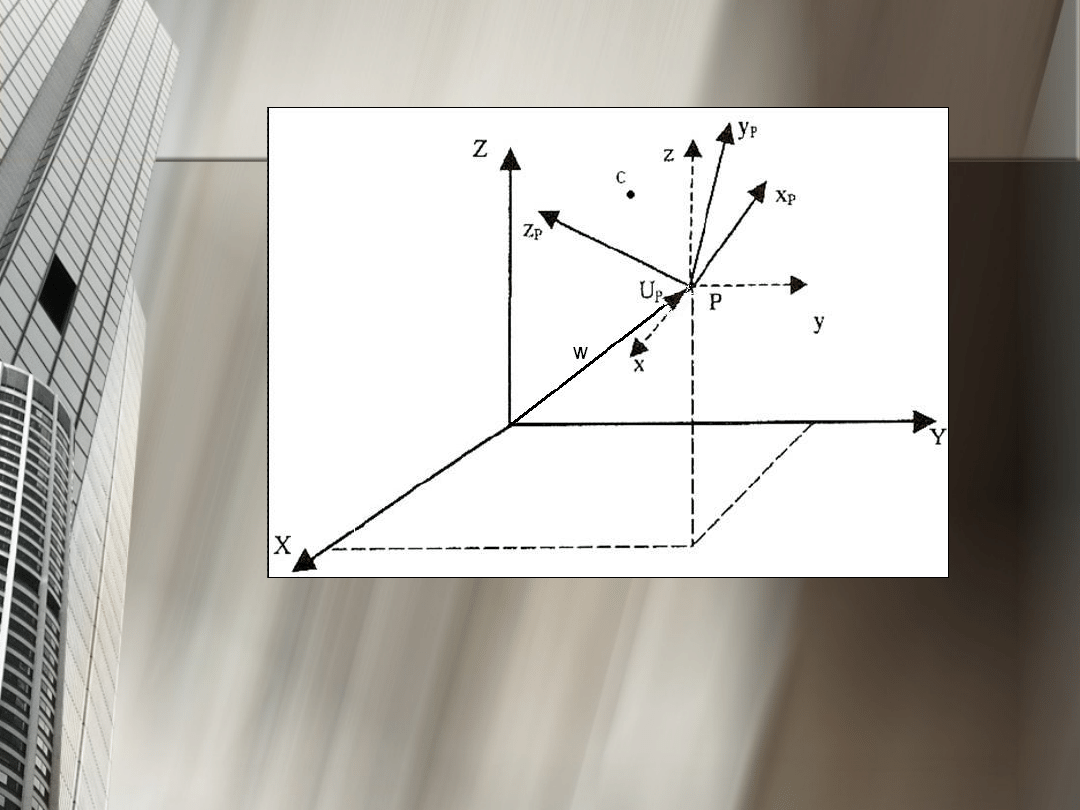
Chcąc znaleźć położenie punktu C (leżącego w
Chcąc znaleźć położenie punktu C (leżącego w
układzie Up) względem głównego układu
układzie Up) względem głównego układu
współrzędnych należy wpierw znaleźć
współrzędnych należy wpierw znaleźć
orientację układu Up względem układu
orientację układu Up względem układu
głównego
głównego
Układ współrzędnych Up jest obrócony
Układ współrzędnych Up jest obrócony
względem układu głownego
względem układu głownego
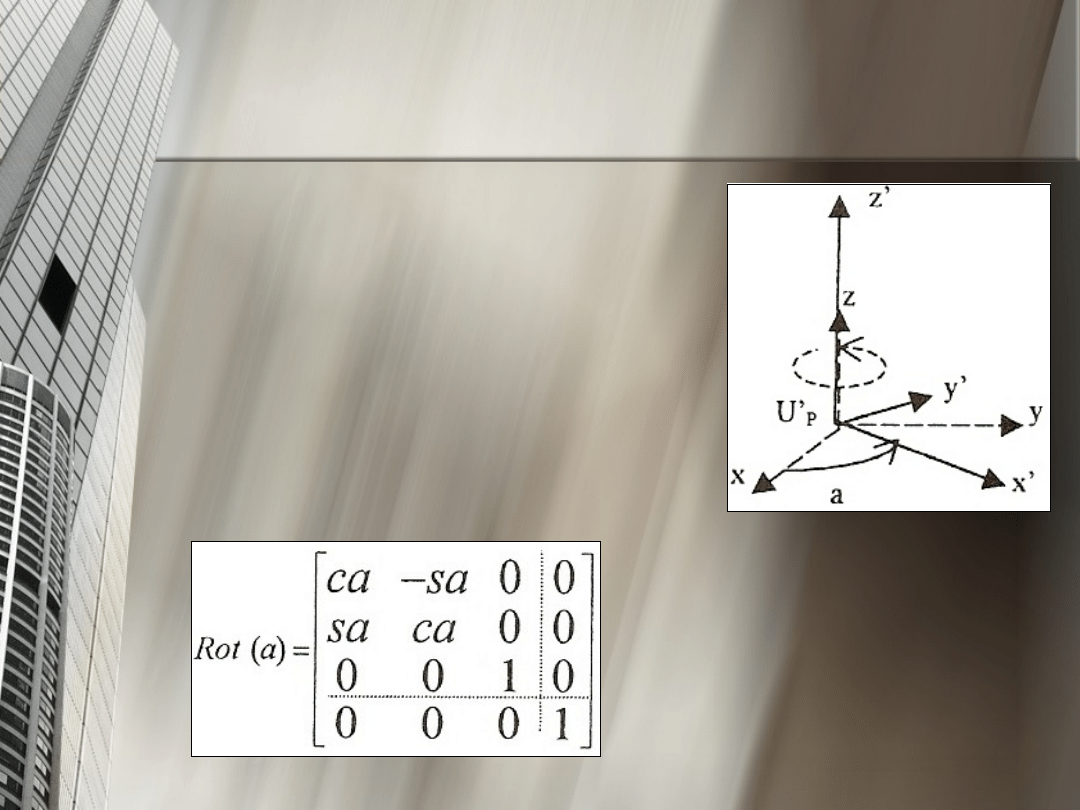
1. układ Up jest obrócony wokół osi Z głównego
1. układ Up jest obrócony wokół osi Z głównego
układu o kąt „a” i powstaje
układu o kąt „a” i powstaje
układu U’p
układu U’p
Obrót ten
Obrót ten
zapisujemy jako
zapisujemy jako
macierz
macierz
gdzie:
gdzie:
c – kosinus kąta
c – kosinus kąta
s – sinus kąta
s – sinus kąta
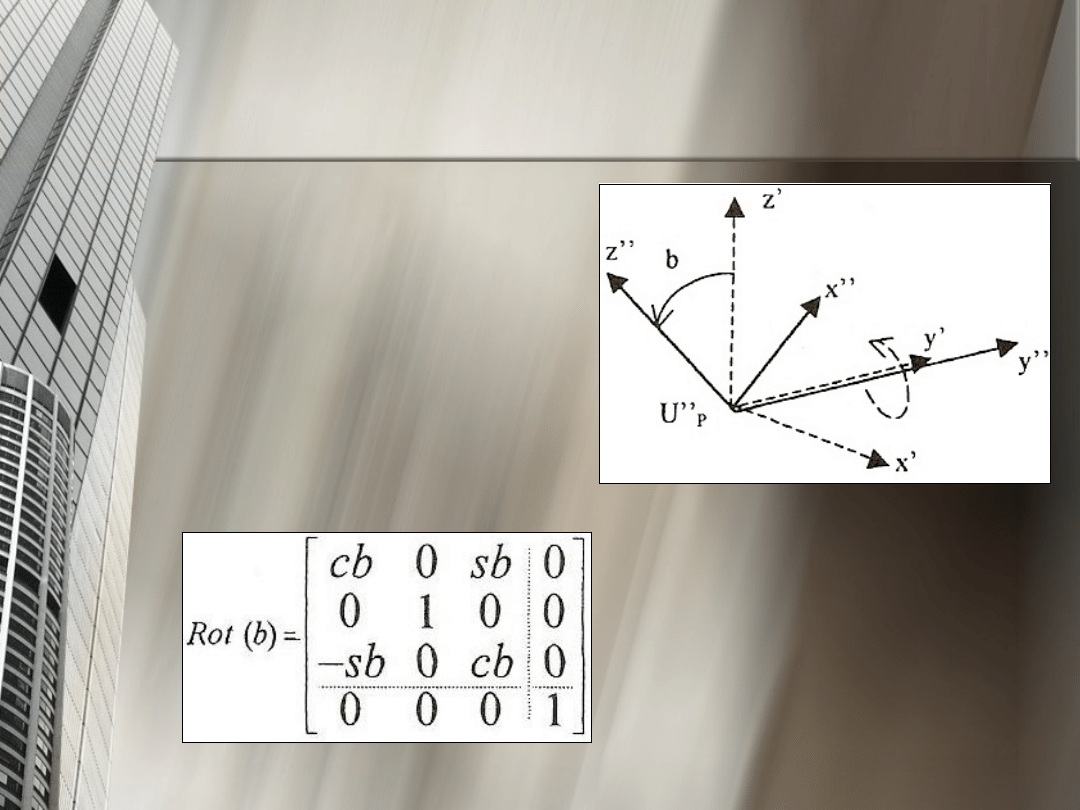
2. układ U’p jest obrócony wokół osi Y’ układu
2. układ U’p jest obrócony wokół osi Y’ układu
U’p o kąt „b” i powstaje
U’p o kąt „b” i powstaje
układu U’’p
układu U’’p
Obrót ten
Obrót ten
zapisujemy jako
zapisujemy jako
macierz
macierz
gdzie:
gdzie:
c – kosinus kąta
c – kosinus kąta
s – sinus kąta
s – sinus kąta
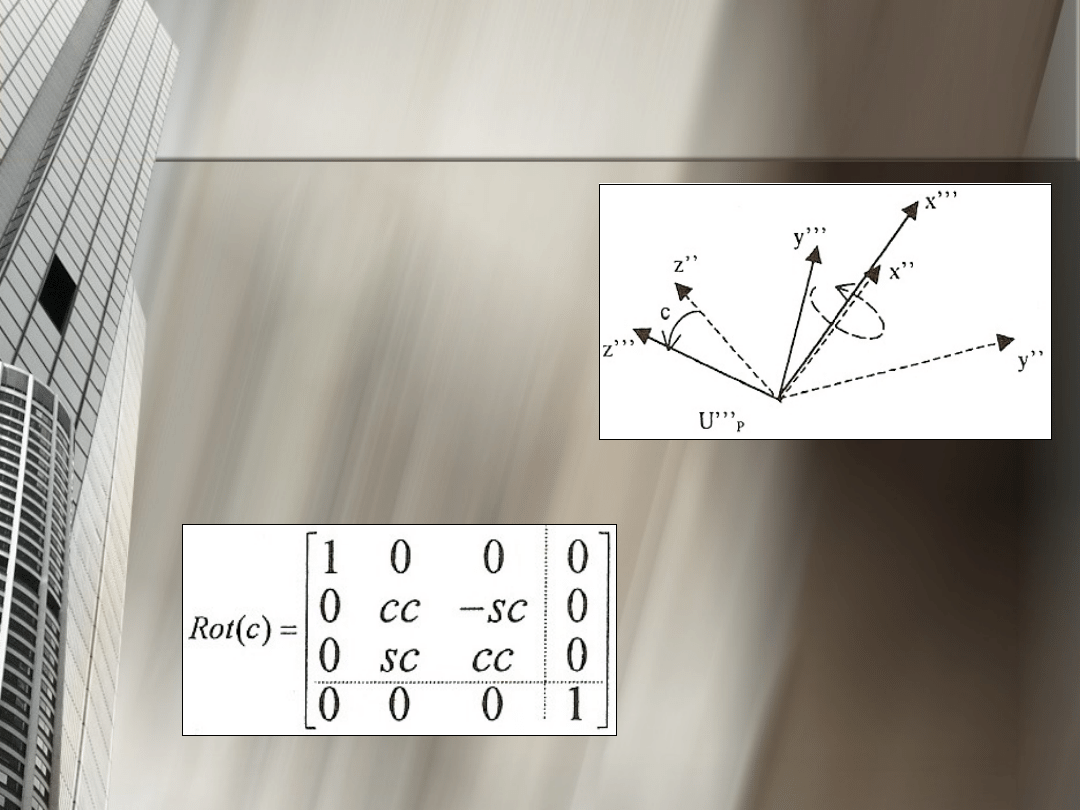
3. układ U’’p jest obrócony wokół osi X’’’ układu
3. układ U’’p jest obrócony wokół osi X’’’ układu
U’’p o kąt „c”
U’’p o kąt „c”
i powstaje układu U’’’p
i powstaje układu U’’’p
Obrót ten
Obrót ten
zapisujemy jako
zapisujemy jako
macierz
macierz
gdzie:
gdzie:
c – kosinus kąta
c – kosinus kąta
s – sinus kąta
s – sinus kąta
Przy obrotach układów Up, U’p, i U’’p i początek
Przy obrotach układów Up, U’p, i U’’p i początek
tych układów współrzędnych nie zmienia się i
tych układów współrzędnych nie zmienia się i
jest wciąż taki sam, czyli pozostaje nim punkt P
jest wciąż taki sam, czyli pozostaje nim punkt P
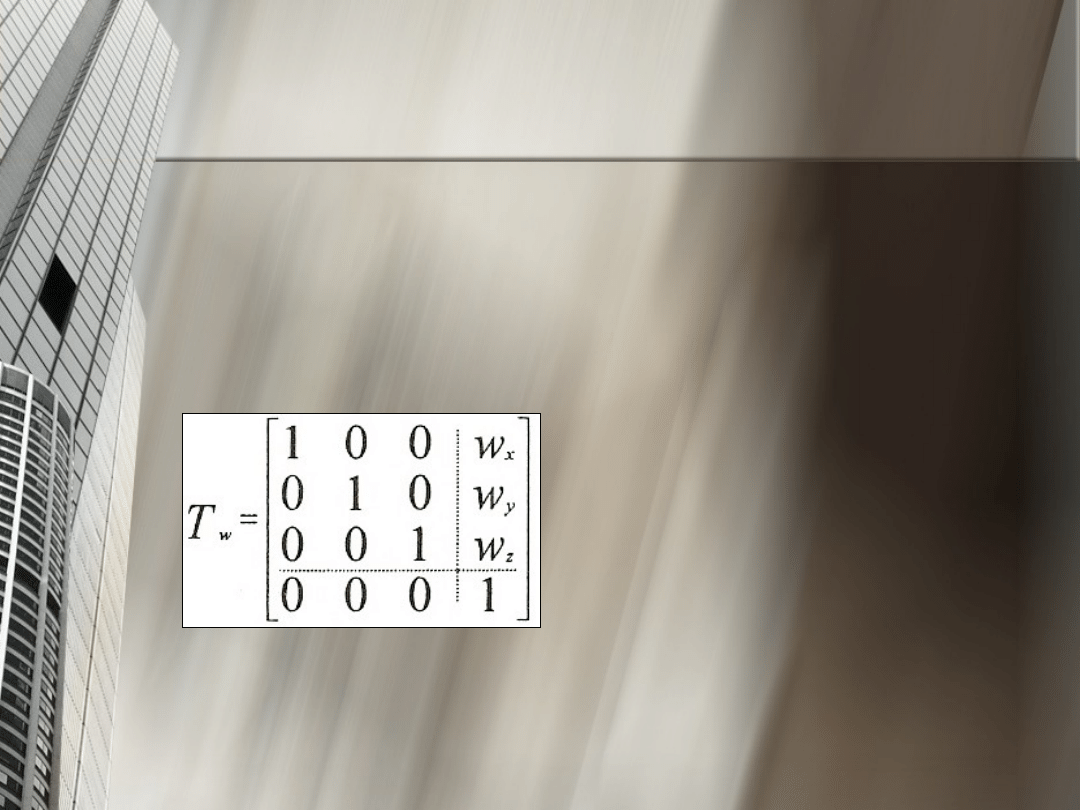
Układ U’’’p jest przesunięty o wektor względem
Układ U’’’p jest przesunięty o wektor względem
układu głównego.
układu głównego.
Wektor ten można zapisać w postaci macierzy:
Wektor ten można zapisać w postaci macierzy:
Wartości „1” i „0” w macierzach dotychczas
Wartości „1” i „0” w macierzach dotychczas
przedstawionych są stałe i nie ulegają zmianie
przedstawionych są stałe i nie ulegają zmianie
Tak więc orientacja układu U’’’p względem
Tak więc orientacja układu U’’’p względem
układu głównego jest iloczynem macierzy
układu głównego jest iloczynem macierzy
obrotu i translacji
obrotu i translacji
czyli:
czyli:
Tp = Rot(a)*Rot(b)*Rot(c)*Tw
Tp = Rot(a)*Rot(b)*Rot(c)*Tw
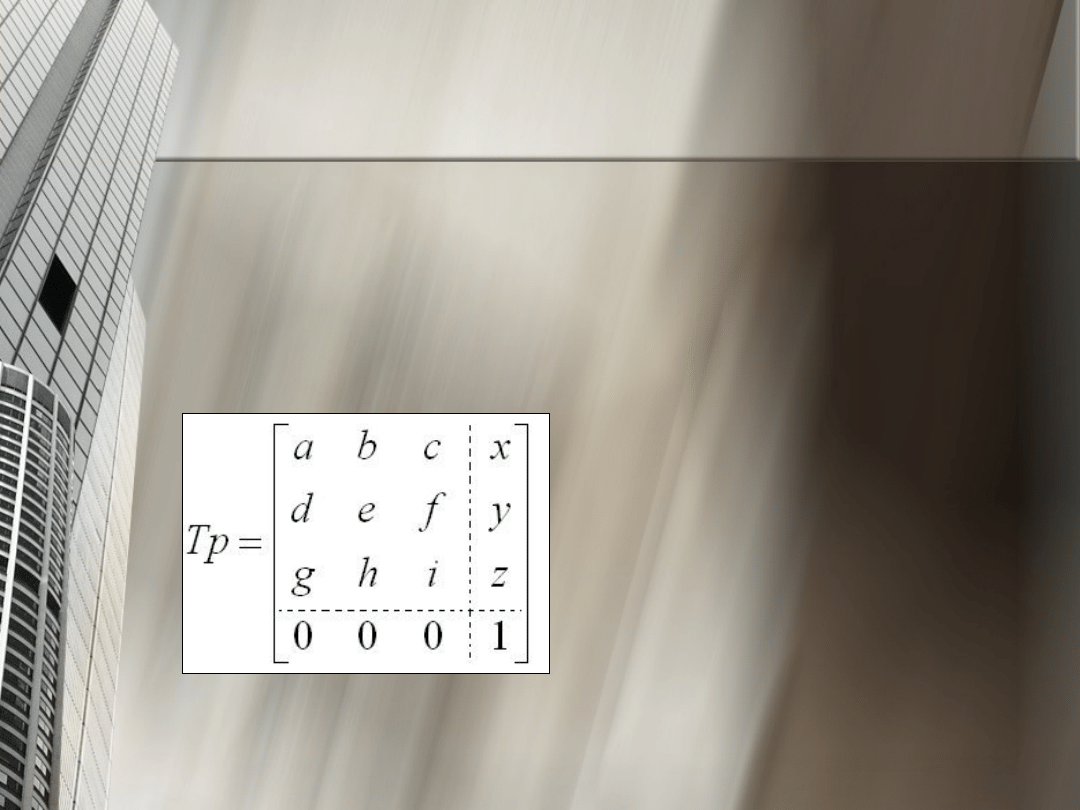
Wynikiem tego iloczynu jest macierz
Wynikiem tego iloczynu jest macierz
gdzie:
gdzie:
a, b, c, d, e, f, g, h, i –
a, b, c, d, e, f, g, h, i –
to orientacja układu
to orientacja układu
U’’’p względem układu
U’’’p względem układu
głównego (tj. jak
głównego (tj. jak
poszczególnego osie
poszczególnego osie
zostały obrócone
zostały obrócone
x, y, z, - to
x, y, z, - to
współrzędne początku
współrzędne początku
układu U’’’p w
układu U’’’p w
układzie głównym
układzie głównym
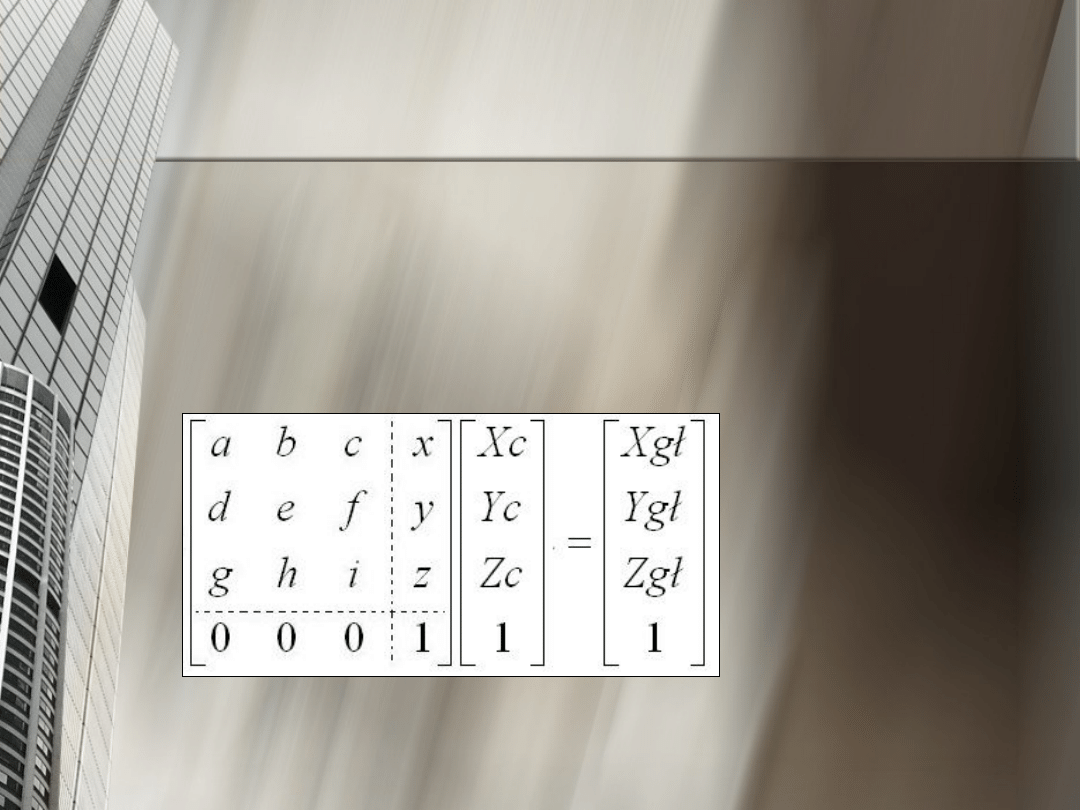
Aby obliczyć położenie punktu C względem
Aby obliczyć położenie punktu C względem
głównego układu należy macierz Tp przemnożyć
głównego układu należy macierz Tp przemnożyć
przez macierz punktu C (Tc)
przez macierz punktu C (Tc)
T
T
gł
gł
= Tp*Tc
= Tp*Tc
gdzie:
gdzie:
X
X
gł
gł
, Y
, Y
gł
gł
, Z
, Z
gł –
gł –
współrzędne
współrzędne
punktu C w
punktu C w
układzie
układzie
głównym
głównym
Gdy mamy do czynienia z większą ilością
Gdy mamy do czynienia z większą ilością
układów to postępujemy w analogiczny sposób.
układów to postępujemy w analogiczny sposób.
Przyjmując, że punkt C jest początkiem
Przyjmując, że punkt C jest początkiem
kolejnego układu współrzędnych a położenie i
kolejnego układu współrzędnych a położenie i
orientacja układu U’’’p względem układu
orientacja układu U’’’p względem układu
głównego jest macierzą A. Potem należy
głównego jest macierzą A. Potem należy
policzyć orientację i położenie układu Uc
policzyć orientację i położenie układu Uc
względem U’’’p z czego otrzymalibyśmy
względem U’’’p z czego otrzymalibyśmy
macierz B. Tak więc chcąc znać orientacje i
macierz B. Tak więc chcąc znać orientacje i
położenie układu Uc względem głównego
położenie układu Uc względem głównego
trzeba macierz A przemnożyć przez macierz B
trzeba macierz A przemnożyć przez macierz B
Copyright by Wojdas
Copyright by Wojdas
®
®
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
Wyszukiwarka
Podobne podstrony:
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
projekt 1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
belki proste zadania z rozwiaza Nieznany (2)
Rozwiązujemy proste zadania tekstowe, scenariusze, edukacja matematyczna
Odwrotne zadanie kinematyki
02 Wykonywanie obliczeń na liczbach przybliżonych, proste zadania(1)id 3492
Zadania z kinematyki, Politechnika Gdańska, Budownictwo, Semestr I, Fizyka I, Ćwiczenia
Termochemia- proste zadania- wydrukowane- wydrukowane, studia, IV semestr, chemia fizyczna
02, Wykonywanie obliczeń na liczbach przybliżonych, proste zadania(1)
ZADANIA KINEMATYKA
Proste zadnie kinematyki, Automatyka i Robotyka, Semestr IV, Kinematyka i dynamika robotów, KIDRIM,
zadania kinematyka
fizyka zadania kinematyka liceum
Druzga, wytrzymałość materiałów Ć, zginanie proste zadania
Proste zadanie matematyczne – test, ŁAMIGŁÓWKI, TESTY I ZAGADKI
więcej podobnych podstron